






本文使用 Zhihu On VSCode 创作并发布
0 前言
自动驾驶开发中经常涉及到多项式曲线拟合,本文详细描述了使用最小二乘法进行多项式曲线拟合的数学原理,通过样本集构造范德蒙德矩阵,将一元 N 次多项式非线性回归问题转化为 N 元一次线性回归问题,并基于线性代数 C++ 模板库——Eigen 进行了实现,最后,比较了几种实现方法在求解速度与求解精度上的差异。
1 最小二乘法概述
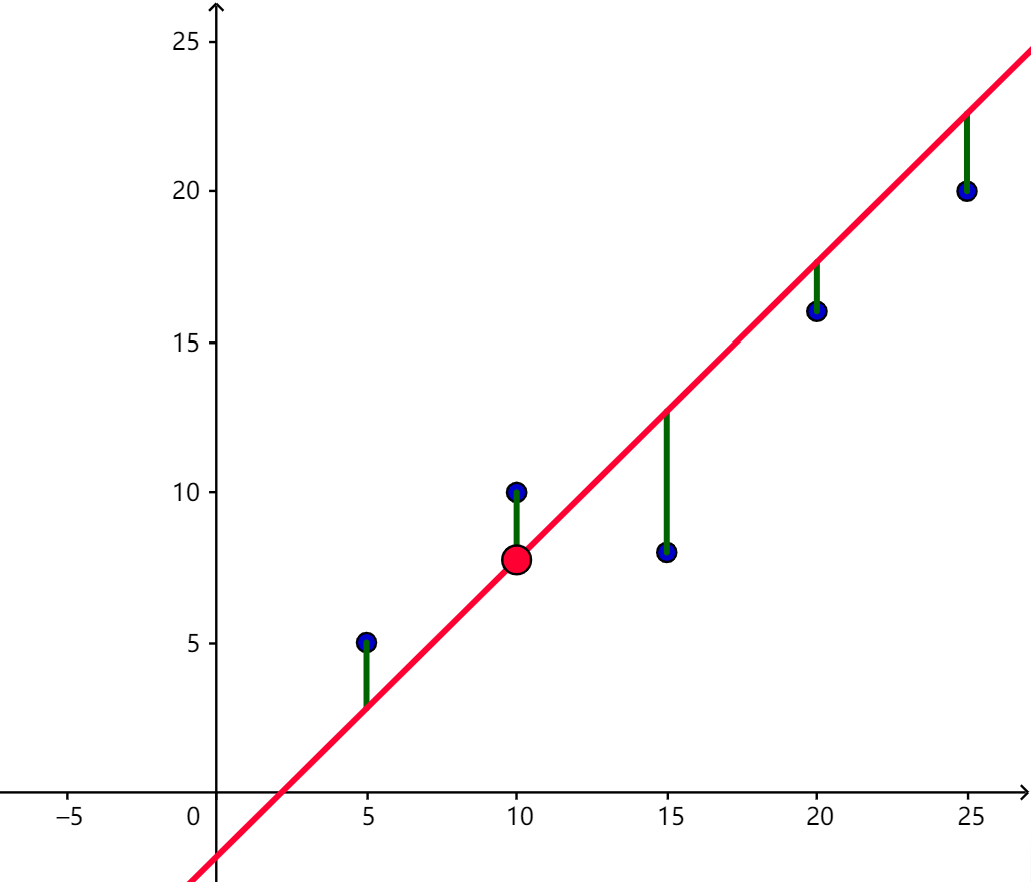
最小二乘法(Least Square Method,LSM)通过最小化误差(也叫残差)的平方和寻找数据的最优函数匹配。
假设给定一组样本数据集
的多次采样,其中:
-
为样本维度
-
为多项式阶数
-
为多项式的各项系数
针对样本数据集
最小二乘法认为,最优函数的各项系数
2 最小二乘法求解多项式曲线系数向量的数学推导
2.1 代数法
由于最优函数的各项系数
整理上式,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 428
428











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









