





简介: 在过去的几年中,高德网络定位算法经历了从无监督算法向有监督算法的演进,从定位精度、定位能力透出等方面都有了显著的提升。
1.导读
GPS定位精度高,且早已成为移动设备标配,但GPS也具有一些难以克服的缺陷,包括:
- 冷启动时间长。GPS启动时,需要进行搜星,锁定卫星信号,然后再进行位置技术,这个过程可能会达到几十秒,即使采用诸如AGPS等技术,仍然有秒级的时间无法定位。
- 室内或有遮挡的场景。GPS信号弱,无法有效定位。
用户需要持续的有效定位,因此需要另一个技术对GPS进行补充,这就是网络定位技术。
网络定位是将手机设备收到的信号(主要是基站、Wifi、蓝牙)发送到网络服务器,获得位置。之所以要将信号数据发送到网络上,是因为网络定位是利用信号指纹进行定位,需要一个庞大的且持续更新的指纹数据库,这个数据库难以同步到移动设备上。为了进行定位,需要事先建立每个位置的指纹特征,然后在定位时用实时指纹比对每个位置的历史指纹,确定位置。
高德网络定位不仅承担着高德地图用户的定位请求,还面向国内所有主流手机厂商,以及国内30万以上App提供服务,日均处理请求千亿次,峰值QPS百万级。
在过去的几年中,高德网络定位算法经历了从无监督算法向有监督算法的演进,从定位精度、定位能力透出等方面都有了显著的提升。
注:高德网络定位只存在于安卓平台上,在iOS上由于苹果公司未开放任何定位相关的指纹数据(Wifi、基站列表等),定位结果全部来自于iOS自身。
2.基于聚类的无监督算法
经典的指纹定位算法是无监督算法,其核心是计算指纹的相似性,用指纹确定位置。下图是一个例子,AP代表手机扫描到的基站和Wifi设备编号,纵轴代表不同的位置,二者交点的数值代表该位置扫描到该AP的信号强度,为空代表该位置没有扫描到该AP。
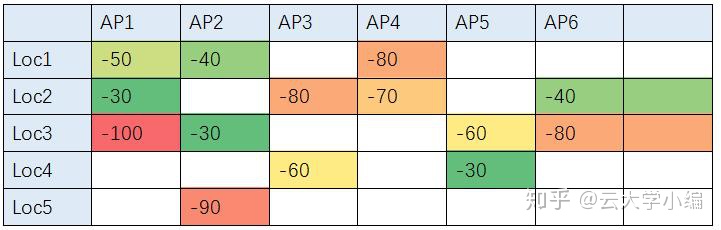
要对一个新定期请求进行定位(比如AP1:-30,AP2:-50,AP3:-90),一个最简单的方法,是用KNN逐一计算该指纹与历史指纹的相似度(比如用L2距离或者余弦相似度),取相似度最大的历史位置作为用户位置。
这有两个问题,第一是计算量太大(AP是10亿量级,loc是千亿量级),无法满足实时定位的要求,第二是历史指纹在局部可能比较稀疏,对于用户指纹无法精确匹配。
于是需要对历史数据进行预处理,提取出AP和网格的通用指纹,这样在定位时只需要比对一次即可。下图是利用一个AP的历史采集位置进行聚类,获得AP实际位置和覆盖半径的过程,有了每个AP的位置,在定位时将多个AP的位置进行加权平均即可获得最终位置。

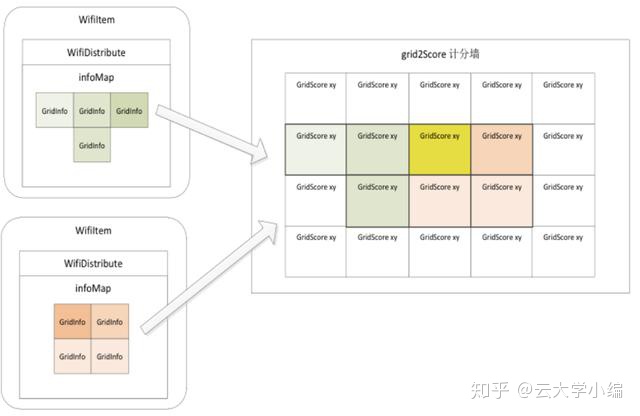
这种方法需要解决的一个挑战是当有多个候选位置时如何选择,如下图所示,有两个候选位置。


此时需要设计一个策略进行簇选择,基于每个簇的特征进行打分,找出最有可能的一个簇作为用户位置。
基于加权平均的定位,速度很快,但精度比较差,原因是指纹在空间上的分布并不是连续的,而可能受到建筑、地形、道路的影响,呈现一种不规则的分布,于是在上面定位方式的基础上,发展出一种基于格子排序的算法,可以更精准的定位。
首先将地球划分为25*25的网格,然后统计每个网格内的指纹特征,最后进行格子排序。设候选网格为l,信号向量是S,则定位过程就是计算

根据贝叶斯公式,有

根据1-1,由于所有候选网格的分母相同,只需要计算分子,即:

其中P(l)是某个位置在全量用户位置中出现的概率,可以用定位PV表示,而P(S=S0|l)则需要计算在每个网格内出现某种信号向量的概率,由于向量维数高,概率难以计算,因此对不同维进行独立假设,认为每个信号出现的概率是独立的。有:

这样,可以基于历史指纹对每个网格内的每个AP的信号强度进行直方图统计,即可计算出概率,最后对所有格子的概率进行排序,获得概率最高的那一个,如下图:
3.基于分层排序的有监督算法
无监督算法的一个问题,是难以迭代,对于badcase无法进行有效优化,一旦调整策略就会影响到其他case,无法获得全局最优。
因此,有监督学习就变得很有必要,高德定位从近两年开始全面转向有监督学习,持续进行特征和模型设计,提升效果,取得了不错的收益,解决了50%以上的大误差问题(5公里以上),在移动Wifi识别上获得了99%以上的识别准确率。
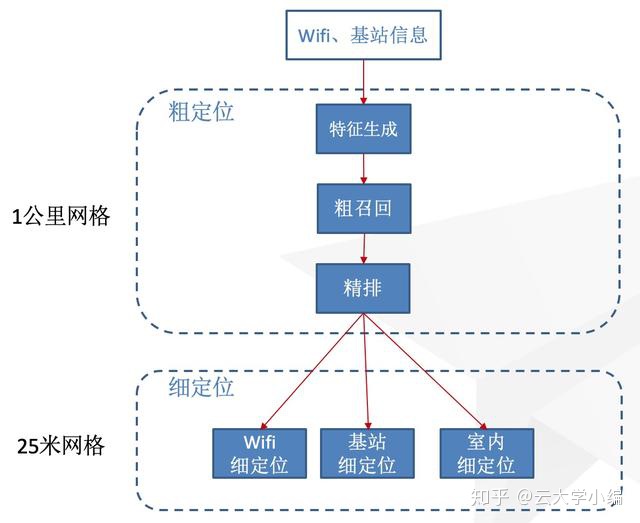
有监督学习需要使用大量的特征,特征的计算需要消耗较多资源,考虑到定位服务要承受10万以上的QPS,模型的复杂性与效果同等重要,因此我们首先将定位服务进行了分层,上面的层级针对大网格,计算粗略的位置,下面的层级针对小网格,逐步细化位置。这样可以极大减少不必要的计算,在性能和效果间取得平衡。
对于每一个单独的算法模块,都采用类似下面的神经网络模型对每个候选网格进行打分,再使用LTR损失函数作为目标进行训练,从而获得神经网络的参数。在特征方面,同时考虑以下三类:
- AP的动态特征,比如信号强度
- 网格特征,比如PV、UV、AP数、周边候选网格数等
- AP在网格上的特征,比如信号强度分布、PV、UV等
采用这种方法可以解决绝大部分格子选择不准确的问题,遗留的一个问题是当定位依据特别少的时候,比如只有一个基站和一个Wifi,二者分别位于距离较远的两个网格,此时无论选择哪个都有50%的错误概率。为了解决这个问题,我们引入了用户历史定位点辅助进行各自选择。
在特征部分加入历史定位点序列,输出一个历史位置特征(可以看成是一个预测的新位置),让这个预测位置参与网格打分。当有两个距离较远但打分接近的网格进行对比时,通过预测位置进行加权。这样模型应该可以学出这样的规律:如果网格距离预测位置比较远,打分就降低,如果比较近,分就高。通过这个方法,大误差case的比例可以降低20%。
4.场景化定位
用户在不同场景下对定位的要求是不同的,比如用户在旅途中可能只需要知道大致的位置,不需要很精确,但是在导航时就需要精确的知道自己在哪条道路上,距离出口多远。
因此,除了在整体算法架构上进行优化,高德还在不同特定场景上进行针对性的优化,满足用户不同场景下的定位需求。














 2367
2367











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









