





引
因为这是本专栏的第一篇文章,所以我打算先在这里介绍下专栏的写作目标。
Rust 是一种系统编程语言。 它有着惊人的运行速度,能够防止段错误,并保证线程安全。
Rust 官方一直标榜着自己是系统编程语言,然而最根本的系统编程就是嵌入式系统开发。如果不能在嵌入式系统里大施拳脚,那么 Rust 就没有底气能与 C 语言叫板。经过了 3 年迭代,Rust 在嵌入式开发领域已经日渐成型,并且官方也成立了嵌入式工作组特别关注 Rust 嵌入式库与工具链的开发,同时也在不断完善The embedded rust book。这里推荐大家关注工作组的 newsletter,里面有很多工作组最新工作进展。
而本专栏将会更面向于嵌入式开发的入门教程和实践,也就是说,本专栏的文章并不假定读者拥有任何嵌入式开发的知识或经验,但是要求读者有一定 Rust 语言基础,比如说熟悉借用所有权系统,懂得使用 unsafe 手动操作内存结构等等。
专栏文章会分为几大类:
- 单片机架构的基础知识
- Rust 嵌入式开发的技巧
- 各种可以跟着动手的实践项目
希望通过本专栏可以吸引 Rust 小伙伴加入嵌入式领域,<del>同时拐骗一波正在使用 C 语言开发嵌入式的水深火热的程序员。</del>
准备
为了能够自己动手实践嵌入式开发,我们需要先准备好一些材料:
- STM32F103 最小系统开发板 (约 10 元)
- STLINK V2 仿真器 (约 20 元)
- 母对母杜邦线
- USB 转 TTL 串口模块 (约 5 元)
STM32F103 是现在应用非常广泛,性能强大而且成本低廉的一款单片机,拥有着高达 72Mhz 的主频率,完全吊打 Arduino 等开发平台。
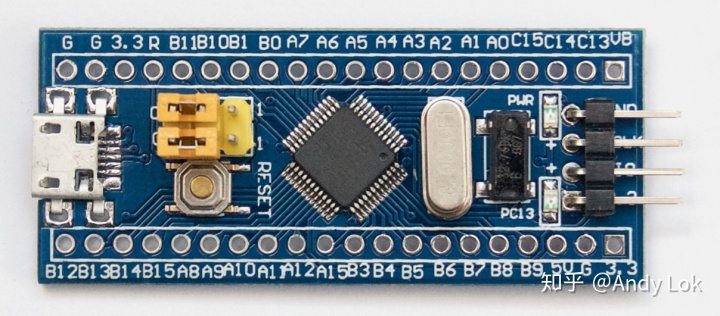
STM32F103 最小系统核心版
仿真器是连接 pc 与单片机的重要模块,主要用于程序烧写与调试。

STLINK V2
串口模块用于 pc 接收单片机的串口信息用以调试,由于现代计算机普遍已经取消了串口接口,所以使用 USB 串口就是最经济可靠的选择。

USB2TTL
Rust 工具链
- 文章下面将会使用
nightly-msvcchannel 的 Rust 编译器工具链(因为作者使用 Windows 平台开发),读者也可以使用gnu或者linux平台,步骤上如果有所出入相信使用linux的老手是可以自己解决的。
> rustup default nightly-msvc
info: using existing install for 'nightly-x86_64-pc-windows-msvc'
info: default toolchain set to 'nightly-x86_64-pc-windows-msvc'
nightly-x86_64-pc-windows-msvc unchanged - rustc 1.32.0-nightly (36a50c29f 2018-11-09)2. 除了默认的标准库外,我们还需要提前编译好的 core 核心库。在我们这里添加几个常用的编译目标指令集,rustup 就会自动把核心库下载下来。
> rustup target add thumbv6m-none-eabi thumbv7m-none-eabi thumbv7em-none-eabi thumbv7em-none-eabihf
info: downloading component 'rust-std' for 'thumbv6m-none-eabi'
info: downloading component 'rust-std' for 'thumbv7m-none-eabi'
info: downloading component 'rust-std' for 'thumbv7em-none-eabi'
info: downloading component 'rust-std' for 'thumbv7em-none-eabihf'3. 另外我们还需要一些传统而好用的二进制工具 (binary tool) 和调试器。在 ARM官网页面 下载适合平台的最新版安装即可。这一步安装的工具包括 arm-none-eabi-nm, arm-none-eabi-gdb, arm-none-eabi-objcopy 还有 arm-none-eabi-size 等等。
4. 最后我们还差 openocd,它负责保持与与仿真器的通讯连接,我们需要使用它来进行烧写和调试指令操作。openocd 的安装途径有很多,建议向购买仿真器的商家索要,或者可以从这里下载(可能需要科学上网)。
注: 上述 3,4 步的工具需要加入 Path 环境变量。
Blinky
Blinky 是嵌入式世界的 hello world —— 让一盏 LED 闪烁。这篇文章的最终目标就是把最小系统版上唯一一颗 LED 灯闪烁起来。
我们先创建一个新的项目。
> cargo new blinky
Created binary (application) `blinky` package打开 Cargo.toml 添加几个依赖项。
[dependencies]
cortex-m = "0.5.8" # cortex-m 核心指令集
cortex-m-rt = "0.6.5" # 最小运行时,负责启动内存初始化
panic-halt = "0.2.0" # 定义发生 panic 时采取立即停机的行为同一架构的单片机的内存容量往往有很大差异,不同厂家的内存排布也不一定相同,所以这里我们要用 memory.x 文件里定义开发板的内存结构。在项目目录中新建文件 memory.x 并写入:
MEMORY
{
FLASH : ORIGIN = 0x08000000, LENGTH = 128K
RAM : ORIGIN = 0x20000000, LENGTH = 20K
}这里定义了我们这个 MCU 拥有 128k ROM 和 20k RAM,内存起点分别在 0x08000000 和 0x20000000。
memory.x 事实上是一段链接器脚本 (Linker Script),链接器脚本用来在内存中规划如何排布代码和静态变量。很明显仅靠这小段脚本还不足以声明好运行所需的所有段 (SECTION)。幸运的是,cortex-m-rt 运行库已经为我们写好了通用的链接脚本,我们仅仅需要在编译时将名为 memory.x 的内存定义脚本放在编译目录,memory.x 就会被自动 include 到模板中。 所以这里需要一段编译时自动拷贝 memory.x 的 build script。在项目目录中新建文件 build.rs 并写入:
use std::env;
use std::fs::File;
use std::io::Write;
use std::path::PathBuf;
fn main() {
// Put the linker script somewhere the linker can find it
let out = &PathBuf::from(env::var_os("OUT_DIR").unwrap());
File::create(out.join("memory.x"))
.unwrap()
.write_all(include_bytes!("memory.x"))
.unwrap();
println!("cargo:rustc-link-search={}", out.display());
// Only re-run the build script when memory.x is changed,
// instead of when any part of the source code changes.
println!("cargo:rerun-if-changed=memory.x");
}接着打开 src/main,写入:
#![no_std]
#![no_main]
extern crate panic_halt;
use cortex_m::asm;
use cortex_m_rt::entry;
#[entry]
fn main() -> ! {
asm::nop();
loop { }
}虽然这段代码看起来毫无作用,但是对于编译来说已经足够了。
可以注意一下这里的 main 函数并不是 Rust 语言内嵌的主函数,事实上,这个主函数仅仅是用户代码的入口,真正的主函数定义在 cortex_m_rt 库中,在启动后负责静态变量和中断向量表的内存初始化,接着才将执行权交回给这里的 main 函数。
执行编译。
> cargo build --target thumbv7m-none-eabi
Compiling blinky v0.1.0
Finished dev [unoptimized + debuginfo] target(s) in 0.62s至此 Blinky 已经成功编译好了,执行文件应该会出现在 /target/thumbv7m-none-eabi/debug/blinky 。接下来我们要把这个程序烧写到芯片的 ROM 上。首先使用杜邦线连接上仿真器与开发板,对应着接口上的名字,应该很容易将四条连接线接好,四个接口分别是 SWDIO, SWCLK, 3.3V 和 GND。
接着启动 openocd。
> openocd -f interface/stlink-v2.cfg -f target/stm32f1x.cfg
64-bits Open On-Chip Debugger 0.10.0-dev-00289-g5eb5e34 (2016-09-03-09:40)
Licensed under GNU GPL v2
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
...
Polling target stm32f1x.cpu failed, trying to reexamine
Info : stm32f1x.cpu: hardware has 6 breakpoints, 4 watchpoints这一步以出现 xxxxx.cpu: hardware has x breakpoints, x watchpoints 提示为连接成功。 如果出现了其他错误,先检查是否已经安装仿真器的驱动,4条连接线有没有松动,或者更换一个 USB 口试试。
保留 openocd 终端,再打开一个新的终端启动 GDB (GNU Debugger) ,使用 GDB 进行执行程序烧写:
> arm-none-eabi-gdb
GNU gdb (GNU Tools for ARM Embedded Processors 6-2017-q1-update) 7.12.1.20170215-git
...
For help, type "help".
(gdb)加载目标文件
(gdb) file ./target/thumbv7m-none-eabi/debug/blinky
Reading symbols from ./target/thumbv7m-none-eabi/debug/blinky...done.连接上 openocd。(openocd 的默认端口为 3333)
(gdb) target remote :3333
Remote debugging using :3333
0x00000000 in ?? ()重置 MCU,因为在运行状态无法进行烧写。
(gdb) monitor reset halt
stm32f1x.cpu: target state: halted
target halted due to debug-request, current mode: Thread
xPSR: 0x01000000 pc: 0x0800016c msp: 0x20000260开始写入
(gdb) load
Start address 0x0, load size 0
Transfer rate: 0 bits in <1 sec.写入后 MCU 默认会暂停在初始状态,这里要手动运行。
(gdb) continue
Continuing.好了到目前为止,如果我们的开发板毫无反应,那就对了,我们现在要给它加上最重要的 Blinky 逻辑。
打开 Cargo.toml 再加上两个依赖
stm32f103xx-hal = { git = "https://github.com/japaric/stm32f103xx-hal.git" } # MCU 外围部件操作的统一接口
nb = "0.1" # stm32f103xx-hal 的异步阻塞模块,用来实现时钟等待同步修改 src/main.rs
#![no_std]
#![no_main]
extern crate panic_halt;
extern crate stm32f103xx_hal as hal;
#[macro_use]
extern crate nb;
use cortex_m_rt::entry;
use hal::prelude::*;
use hal::stm32f103xx;
use hal::timer::Timer;
#[entry]
fn main() -> ! {
let cp = cortex_m::Peripherals::take().unwrap();
let dp = stm32f103xx::Peripherals::take().unwrap();
let mut flash = dp.FLASH.constrain();
let mut rcc = dp.RCC.constrain();
// 设置时钟总线
let clocks = rcc.cfgr.freeze(&mut flash.acr);
// 设置通用引脚 (GPIO)
let mut gpioc = dp.GPIOC.split(&mut rcc.apb2);
// LED 对应的 PC13 引脚
let mut led = gpioc.pc13.into_push_pull_output(&mut gpioc.crh);
// 淘宝上有些版本的核心板的 LED 会接在 PB12 引脚上,这样的话用下面两行替换
// let mut gpiob = dp.GPIOB.split(&mut rcc.apb2);
// let mut led = gpiob.pb12.into_push_pull_output(&mut gpiob.crh);
let mut timer = Timer::syst(cp.SYST, 1.hz(), clocks);
loop {
block!(timer.wait()).unwrap();
// 点亮 LED
led.set_high();
block!(timer.wait()).unwrap();
// 关闭 LED
led.set_low();
}
}重新编译 Rust。
> cargo build --target thumbv7m-none-eabi
Compiling blinky v0.1.0
Finished dev [unoptimized + debuginfo] target(s) in 0.1s 回到 GDB 终端,此时如果还在运行上一段代码,那按下 Ctrl + C 就可以中断执行。
Continuing.
Program received signal SIGINT, Interrupt.
0x08000240 in ?? ()
(gdb) 直接执行 load 指令,GDB 会自动识别到可执行文件的变更并进行覆写。
(gdb) load
Start address 0x0, load size 0
Transfer rate: 0 bits in <1 sec.
(gdb) continue
Continuing. 至此,我们的蓝色 LED 就应该会开始以一秒间隔开始闪烁了!
如果你有幸看到这,那就帮忙点个赞,让更多人看到吧!















 239
239











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









