





全文共14118字,预计学习时长30分钟或更长
想了解如何使用numpy在tensorflow或pytorch中实现优化算法,以及如何使用matplotlib创建精美的动画?
本文将讨论如何实现梯度下降优化技术的不同变体,以及如何使用matplotlib将用于这些变体更新规则的运作可视化出来。
本文的内容和结构基于 One-Fourth Labs。
梯度下降是优化神经网络最常用的技术之一。梯度下降算法是通过向相对于网络参数的目标函数梯度的相反方向移动来更新参数。

运用Numpy在Python中实现

编码部分将讨论以下主题。
• Sigmoid神经元类
• 总体设置——何为数据、模型、任务
• 绘图功能——3D和轮廓图
• 个体算法及其执行方式
在开始实现梯度下降之前,首先需要输入所需的库。从mpl_toolkits.mplot3d输入的Axes3D提供了一些基本的3D绘图(散点、曲面、直线、网格)工具。它并非最快或功能最完整的3D库,而是Matplotlib附带的。还从 Matplotlib输入colors和colormap(cm)。我们想要制作动画图来演示每种优化算法的工作原理,所以我们输入animation和rc来让图表看起来美观。为了显示HTML,在Jupyter Notebook中成线性排列。最后为了计算目的来输入numpy,这项计算任务很繁重。
from mpl_toolkits.mplot3d import Axes3D
import matplotlib.pyplot as plt
from matplotlib import cm
import matplotlib.colors
from matplotlib import animation, rc
from IPython.display import HTML
import numpy as np
实施Sigmoid神经元
为了实现梯度下降优化技术,以sigmoid神经元(逻辑函数)为例,看看梯度下降的不同变体是如何学习参数“ w”和“ b”的。
Sigmoid神经元复查
Sigmoid神经元类似于感知机神经元(perceptron neuron),因为对于每个输入xi,其都有与输入相关的权重wi。权重表明了输入在决策过程中的重要性。来自sigmoid的输出不同于感知机模型,其输出不是0或1,而是一个介于0到1之间的实数值,可以解释为概率。最常用的sigmoid 函数是逻辑函数,它具有“ S”形曲线的特征。
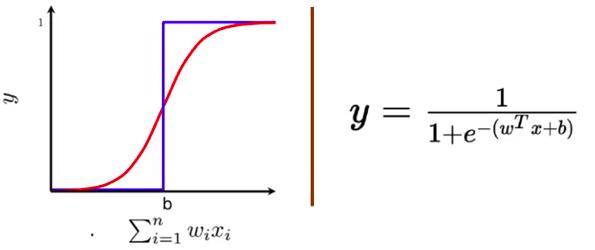
Sigmoid神经元标注(逻辑函数)
学习算法
学习算法的目标是确定参数(w和b)的最佳可能值,以使模型的整体损失(平方误差损失)尽可能最小化。
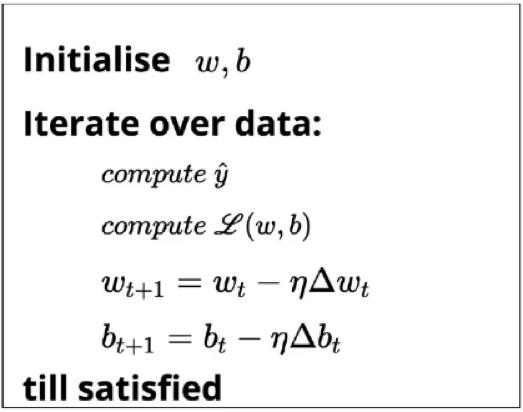
对w和b进行随机初始化。然后,对数据中的所有观测值进行迭代。使用sigmoid函数找到每个观测值相应的预测结果,并计算均方误差损失。基于损失值,将更新权重,以使在新参数下模型的整体损失将小于模型的当前损失。
Sigmoid神经元类
在开始分析梯度下降算法的不同变体之前,将在名为SN的类中构建模型。
class SN:
#constructor
def __init__(self, w_init, b_init, algo):
self.w = w_init
self.b = b_init
self.w_h = []
self.b_h = []
self.e_h = []
self.algo = algo
#logistic function
def sigmoid(self, x, w=None, b=None):
if w is None:
w = self.w
if b is None:
b = self.b
return 1. / (1. + np.exp(-(w*x + b)))
#loss function
def error(self, X, Y, w=None, b=None):
if w is None:
w = self.w
if b is None:
b = self.b
err = 0
for x, y in zip(X, Y):
err += 0.5 * (self.sigmoid(x, w, b) - y) ** 2
return err
def grad_w(self, x, y, w=None, b=None):
if w is None:
w = self.w
if b is None:
b = self.b
y_pred = self.sigmoid(x, w, b)
return (y_pred - y) * y_pred * (1 - y_pred) * x
def grad_b(self, x, y, w=None, b=None):
if w is None:
w = self.w
if b is None:
b = self.b
y_pred = self.sigmoid(x, w, b)
return (y_pred - y) * y_pred * (1 - y_pred)
def fit(self, X, Y,
epochs=100, eta=0.01, gamma=0.9, mini_batch_size=100, eps=1e-8,
beta=0.9, beta1=0.9, beta2=0.9
):
self.w_h = []
self.b_h = []
self.e_h = []
self.X = X
self.Y = Y
if self.algo == 'GD':
for i in range(epochs):
dw, db = 0, 0
for x, y in zip(X, Y):
dw += self.grad_w(x, y)
db += self.grad_b(x, y)
self.w -= eta * dw / X.shape[0]
self.b -= eta * db / X.shape[0]
self.append_log()
elif self.algo == 'MiniBatch':
for i in range(epochs):
dw, db = 0, 0
points_seen = 0
for x, y in zip(X, Y):
dw += self.grad_w(x, y)
db += self.grad_b(x, y)
points_seen += 1
if points_seen % mini_batch_size == 0:
self.w -= eta * dw / mini_batch_size
self.b -= eta * db / mini_batch_size
self.append_log()
dw, db = 0, 0
elif self.algo == 'Momentum':
v_w, v_b = 0, 0
for i in range(epochs):
dw, db = 0, 0
for x, y in zip(X, Y):
dw += self.grad_w(x, y)
db += self.grad_b(x, y)
v_w = gamma * v_w + eta * dw
v_b = gamma * v_b + eta * db
self.w = self.w - v_w
self.b = self.b - v_b
self.append_log()
elif self.algo == 'NAG':
v_w, v_b = 0, 0
for i in range(epochs):
dw, db = 0, 0
v_w = gamma * v_w
v_b = gamma * v_b
for x, y in zip(X, Y):
dw += self.grad_w(x, y, self.w - v_w, self.b - v_b)
db += self.grad_b(x, y, self.w - v_w, self.b - v_b)
v_w = v_w + eta * dw
v_b = v_b + eta * db
self.w = self.w - v_w
self.b = self.b - v_b
self.append_log()
#logging
def append_log(self):
self.w_h.append(self.w)
self.b_h.append(self.b)
self.e_h.append(self.error(self.X, self.Y))
#constructor
def __init__(self, w_init, b_init, algo):
self.w = w_init
self.b = b_init
self.w_h = []
self.b_h = []
self.e_h = []
self.algo = algo
init__函数(构造函数)有助于将sigmoid神经元的参数初始化为w权重和b偏差。这个函数有三个参数:
• w_init,b_init,这些取参数“w”和“b”的初始值,而非随机设置参数,将其设置为特定值。这样能够通过可视化不同初始点来理解算法的执行方式。有些算法在某些参数下陷入局部最小值。
• algo指出使用何种梯度下降算法的变体来发现最佳参数。
在此函数中,我们对参数进行初始化,并定义了三种带有后缀'_h'的新数组变量,表示它们是历史变量,以跟踪权重(w_h)、偏差(b_h)和误差(e_h)的值是如何随着sigmoid神经元学习参数而变化的。
def sigmoid(self, x, w=None, b=None):
if w is None:
w = self.w
if b is None:
b = self.b
return 1. / (1. + np.exp(-(w*x + b)))
有一个sigmoid函数,它接受输入x-强制参数,并计算输入的逻辑函数及参数。该函数还接受其他两个可选参数。
• w & b,以“ w”和“ b”用作参数,它有助于根据特定的参数值来计算sigmoid函数的值。如果未传递这些参数,它将使用已学的参数值来计算逻辑函数。
def error(self, X, Y, w=None, b=None):
if w is None:
w = self.w
if b is None:
b = self.b
err = 0
for x, y in zip(X, Y):
err += 0.5 * (self.sigmoid(x, w, b) - y) ** 2
return err
下面,有error 函数,输入X和Y作为强制参数和可选参数 ,像sigmoid函数一样。在这个函数中,通过每个数据点进行迭代,并使用sigmoid函数计算实际特征值和预测特征值之间的累积均方误差。正如在sigmoid函数中看到的,它支持在指定参数值下计算误差。
def grad_w(self, x, y, w=None, b=None):
.....
def grad_b(self, x, y, w=None, b=None):
.....
接下来,将定义两个函数grad_w和grad_b。输入“x”和“y”作为强制参数,有助于分别计算sigmoid相对于参数“w”和“b”输入的梯度。还有两个可选参数,计算指定参数值处的梯度。
def fit(self, X, Y, epochs=100, eta=0.01, gamma=0.9, mini_batch_size=100, eps=1e-8,beta=0.9, beta1=0.9, beta2=0.9):
self.w_h = []
.......
接下来,定义“ fit”法,它接受输入“ X”,“ Y”和其他一系列参数。每当将其用于梯度下降算法的特定变体时,都会解释这些参数。该函数首先初始化历史记录变量并设置本地输入变量以存储输入参数数据。
然后,对于该函数支持的每个算法,有一堆不同的“if-else”语句。依据选择的算法,将在fit法中实现梯度下降。在本文的后半部分,将详细解释这些实现。
def append_log(self):
self.w_h.append(self.w)
self.b_h.append(self.b)
self.e_h.append(self.error(self.X, self.Y))
最后,有theappend_log函数,用以存储各时期各梯度下降的参数值和损失函数值。
绘图设置
本节将定义一些配置参数,使用简单的二维toy数据集来模拟梯度下降更新规则。还定义了一些函数,创建三维和二维图并为其设置动画,可视化更新规则的运作。这种设置有助于针对不同起点、不同超参数设置和不同梯度下降变量的绘图/动画更新规则运行不同的实验。
#Data
X = np.asarray([3.5, 0.35, 3.2, -2.0, 1.5, -0.5])
Y = np.asarray([0.5, 0.50, 0.5, 0.5, 0.1, 0.3])
#Algo and parameter values
algo = 'GD'
w_init = 2.1
b_init = 4.0
#parameter min and max values- to plot update rule
w_min = -7
w_max = 5
b_min = -7
b_max = 5
#learning algorithum options
epochs = 200
mini_batch_size = 6
gamma = 0.9
eta = 5
#animation number of frames
animation_frames = 20
#plotting options
plot_2d = True
plot_3d = False
首先,采用一个简单的二维玩具数据集,它包括两个输入和两个输出。在第5行定义一个字符串变量algo,它接受要执行的算法类型。初始化第6-7行中的参数'w'和'b',以指示算法的开始位置。
从第9-12行开始,设置参数的极限,即signoid神经元在指定范围内搜索最佳参数的范围。这些精心挑选的数字,用以说明梯度下降更新规则的运作。接下来将设置超参数的值,将某些变量特定于某些算法。在我们讨论算法实现的时候,我会对此进行讨论。最后,从19-22行开始,明确制作动画或绘制更新规则所需的变量。
sn = SN(w_init, b_init, algo)
sn.fit(X, Y, epochs=epochs, eta=eta, gamma=gamma, mini_batch_size=mini_batch_size)
plt.plot(sn.e_h, 'r')
plt.plot(sn.w_h, 'b')
plt.plot(sn.b_h, 'g')
plt.legend(('error', 'weight', 'bias'))
plt.title("Variation of Parameters and loss function")
plt.xlabel("Epoch")
plt.show()
设置好配置参数后,将SN类进行初始化,然后使用配置参数调用fit法。此外,绘制三个历史变量,用以将参数和损失函数值在各个时期之间的变化进行可视化。
3D和2D绘图设置
if plot_3d:
W = np.linspace(w_min, w_max, 256)
b = np.linspace(b_min, b_max, 256)
WW, BB = np.meshgrid(W, b)
Z = sn.error(X, Y, WW, BB)
fig = plt.figure(dpi=100)
ax = fig.gca(projection='3d')
surf = ax.plot_surface(WW, BB, Z, rstride=3, cstride=3, alpha=0.5, cmap=cm.coolwarm, linewidth=0, antialiased=False)
cset = ax.contourf(WW, BB, Z, 25, zdir='z', offset=-1, alpha=0.6, cmap=cm.coolwarm)
ax.set_xlabel('w')
ax.set_xlim(w_min - 1, w_max + 1)
ax.set_ylabel('b')
ax.set_ylim(b_min - 1, b_max + 1)
ax.set_zlabel('error')
ax.set_zlim(-1, np.max(Z))
ax.view_init (elev=25, azim=-75) # azim = -20
ax.dist=12
title = ax.set_title('Epoch 0')
首先为了创建3D绘图,要在“ w”和“ b”的最小值和最大值之间创建256个相等间隔的值来创建网格,如第2-5行所示。使用网格通过调用Sigmoid类中的error函数来计算这些值的误差(第5行)SN。在第8行创建轴手柄以创建三维绘图。
为了创建3D绘图,使用ax.plot_surface函数,通过设置rstride和cstride,指定采样点和数据的频率,创建关于权重和误差的表面图。接下来,使用ax.contourf函数,通过将误差值指定为“ Z”方向(第9-10行),在表面顶部绘制相对于权重和偏差的误差轮廓。在11-16行中,为每个轴设置标签,并为所有三维设置轴限。正在绘制三维绘图,所以需要定义视点。在第17–18行中为绘图设置了一个视点,该视点在“ z”轴上的高度为25度,距离为12个单位。
def plot_animate_3d(i):
i = int(i*(epochs/animation_frames))
line1.set_data(sn.w_h[:i+1], sn.b_h[:i+1])
line1.set_3d_properties(sn.e_h[:i+1])
line2.set_data(sn.w_h[:i+1], sn.b_h[:i+1])
line2.set_3d_properties(np.zeros(i+1) - 1)
title.set_text('Epoch: {: d}, Error: {:.4f}'.format(i, sn.e_h[i]))
return line1, line2, title
if plot_3d:
#animation plots of gradient descent
i = 0
line1, = ax.plot(sn.w_h[:i+1], sn.b_h[:i+1], sn.e_h[:i+1], color='black',marker='.')
line2, = ax.plot(sn.w_h[:i+1], sn.b_h[:i+1], np.zeros(i+1) - 1, color='red', marker='.')
anim = animation.FuncAnimation(fig, func=plot_animate_3d, frames=animation_frames)
rc('animation', html='jshtml')
anim
基于静态三维绘图,想要可视化该算法的动态操作,该操作是由用于参数和误差函的历史变量在算法的各个时期捕获。要创建梯度下降算法的动画,将使用通过传递自定义函数plot_animate_3d作为参数之一的animation.FuncAnimation函数,并指定创建动画所需的帧数。plot_animate_3d函数plot_animate_3d为“ w”和“ b”的相应值更新参数值和误差值。在第7行的相同函数中,将文本设置为显示该特定时期的误差值。最后,为了在线显示动画,调用rc函数以在jupyter笔记本中呈现HTML内容。
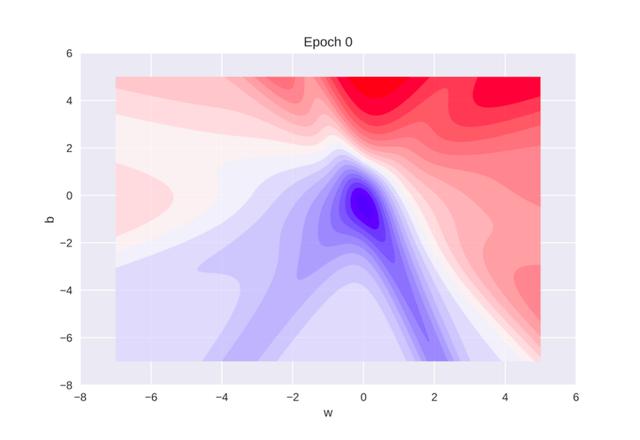
类似于三维绘图,可以创建一个函数用以绘制二维等高线图。
if plot_2d:
W = np.linspace(w_min, w_max, 256)
b = np.linspace(b_min, b_max, 256)
WW, BB = np.meshgrid(W, b)
Z = sn.error(X, Y, WW, BB)
fig = plt.figure(dpi=100)
ax = plt.subplot(111)
ax.set_xlabel('w')
ax.set_xlim(w_min - 1, w_max + 1)
ax.set_ylabel('b')
ax.set_ylim(b_min - 1, b_max + 1)
title = ax.set_title('Epoch 0')
cset = plt.contourf(WW, BB, Z, 25, alpha=0.8, cmap=cm.bwr)
plt.savefig("temp.jpg















 521
521











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









