







第一步,将电脑 IP 更改成
 或者同一 IP 段内即可。
或者同一 IP 段内即可。
第二步,将网线用电脑和机器人连接
第三步,打开 Workvisual 软件(以下简称 WV 软件)
软件打开后入下图 1 所示:
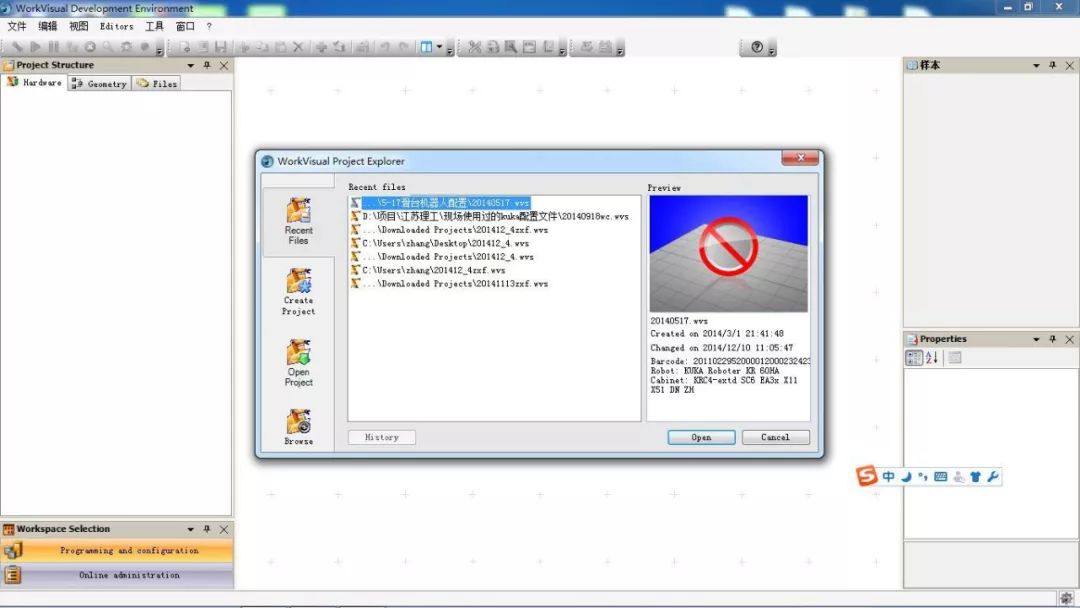
图1,WV 软件打开界面
在 WV 软件的窗口中如图 2 所示
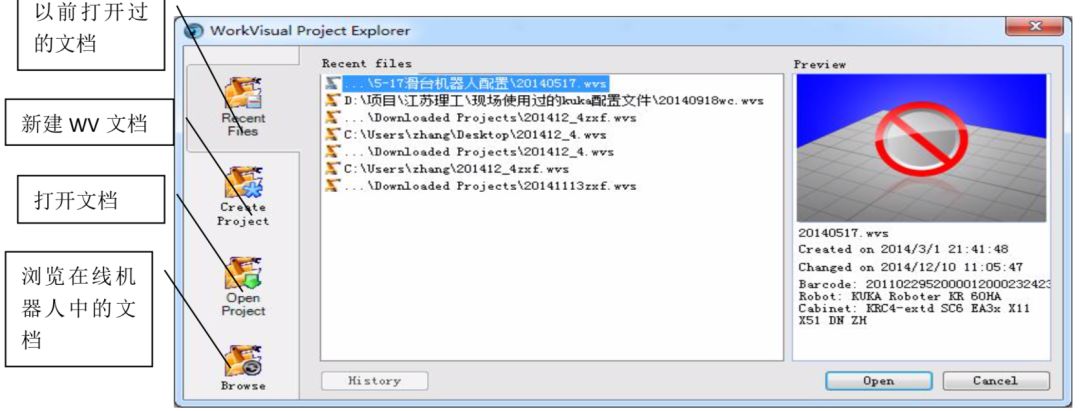
图 2 项目文件选择
当选择 Browse 时,界面如图 3 所示
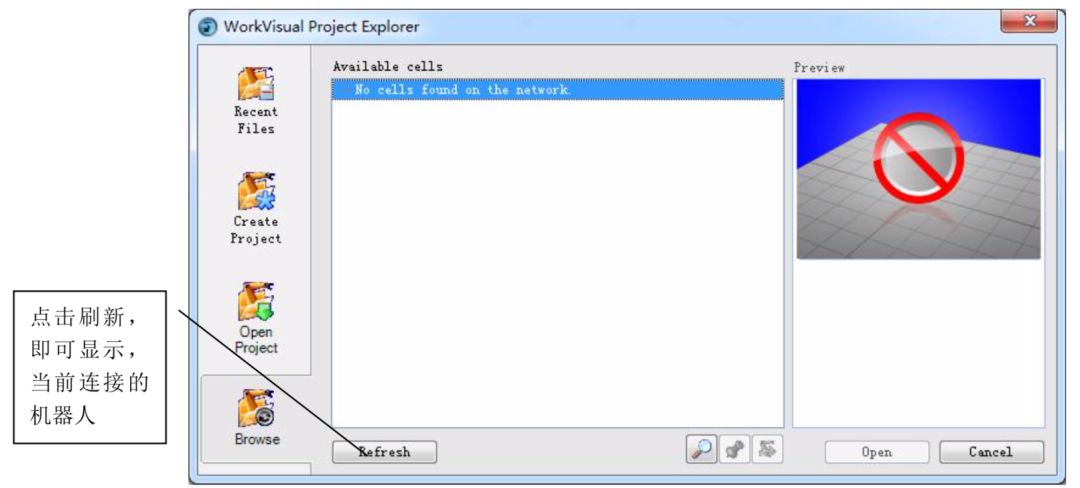
图3
打开 VW 文件后,界面如图 4 所示
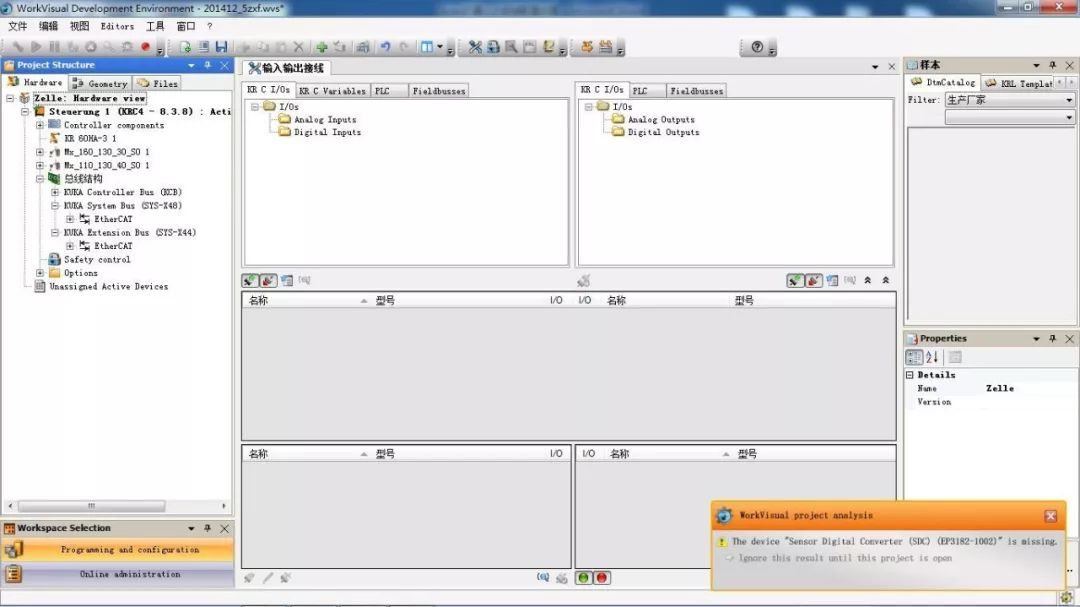
图4
第四步,拍下外部轴点机的型号,如图 5 查找点机的 Art-Nr 号,对应
 kuka 文件
kuka 文件
查找电机的型号

图5
例如图 5 中的电机订货号后六位是 121216,参考 kuka 文件中如图 6,可查出电机型号为MX_110_130_40_S0
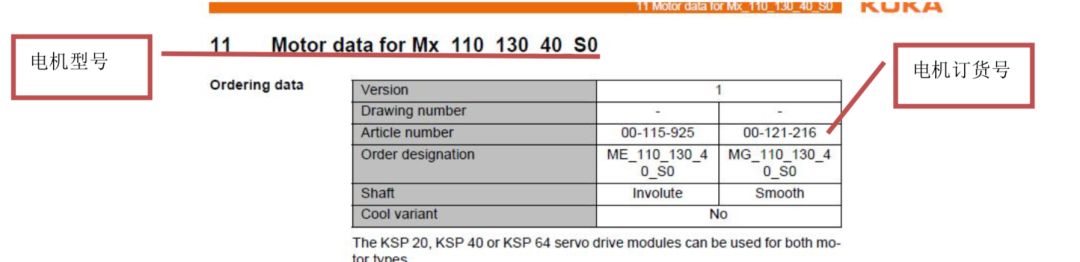
图6
第五步,现在开始添加外部轴,当 kuka 机器人有两个外部轴系统时,原则上先添加直线导 轨外部系统,再配旋转轴外部系统。下面配置示例的就是直线导轨外部轴。
单击 geometric view 项中右击添加 Mx_110_130_40_S0,如图 7
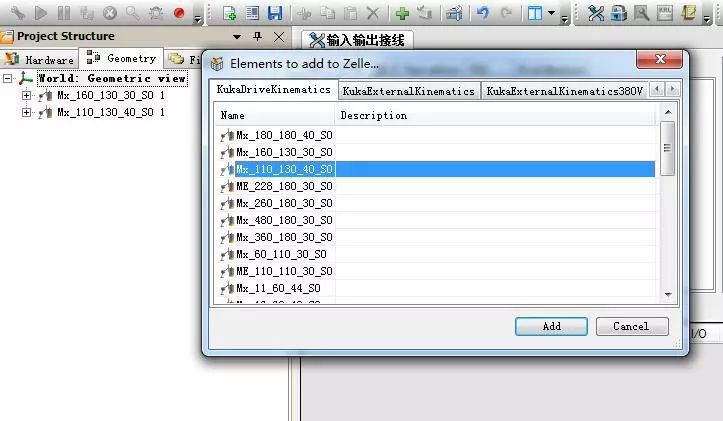
图 7 添加外部轴电机
添加完后把 KR60HA_3 拖到 MX_60_110_30_S0 的 FLANGE BASE 下面,如图 8
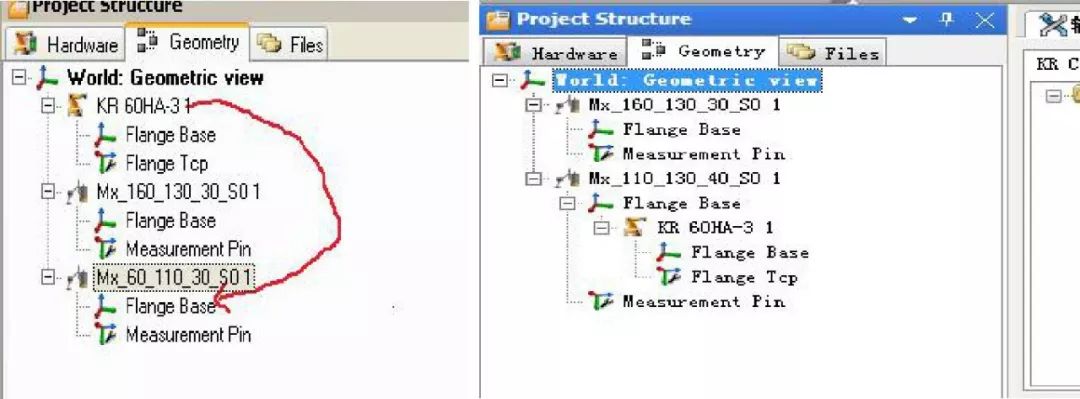
图8
图8单击右下角 添加 Mx_110_130_40_S0,如图9
图9
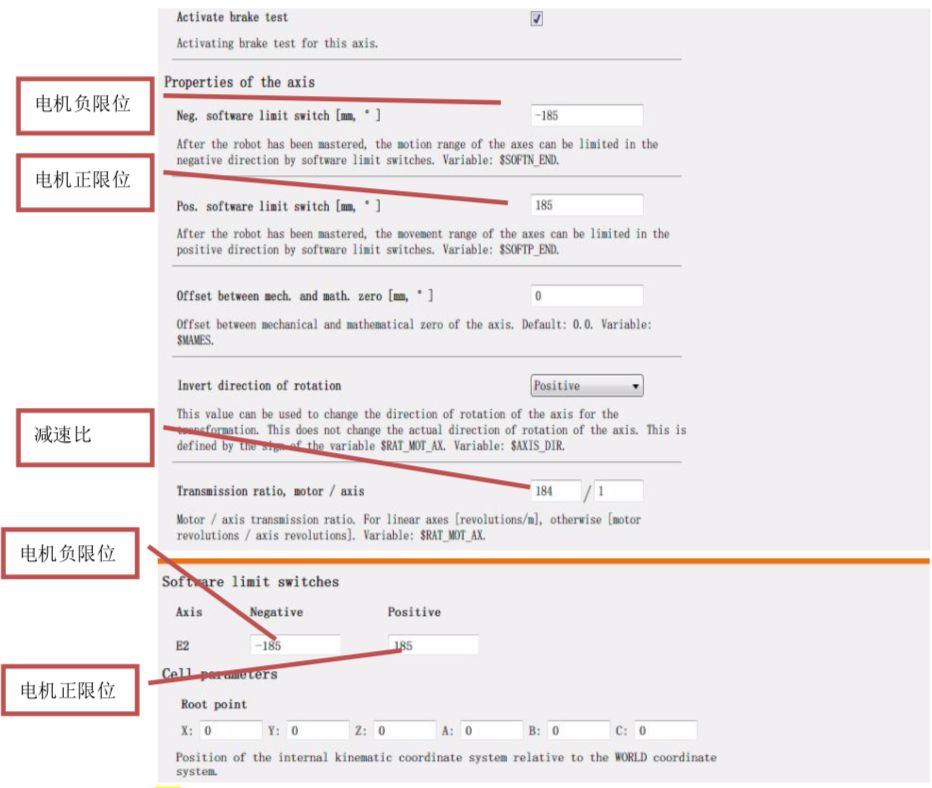
保存 ——》设置参数——》保存——》编译,参数设置在如图10中
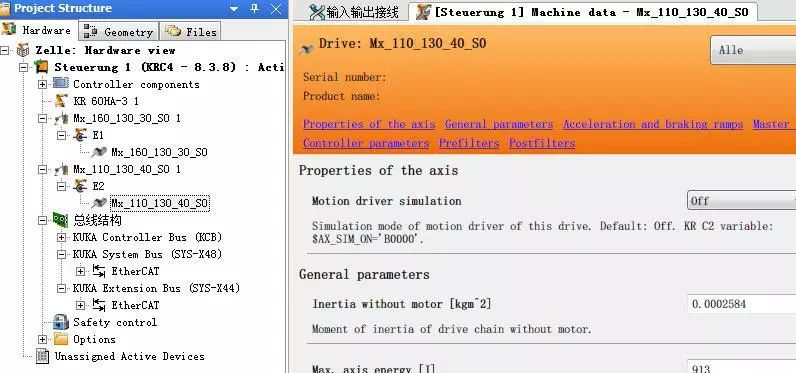
图10
图10参数主要有限位,电机转向,轴的类型,减速比等参数
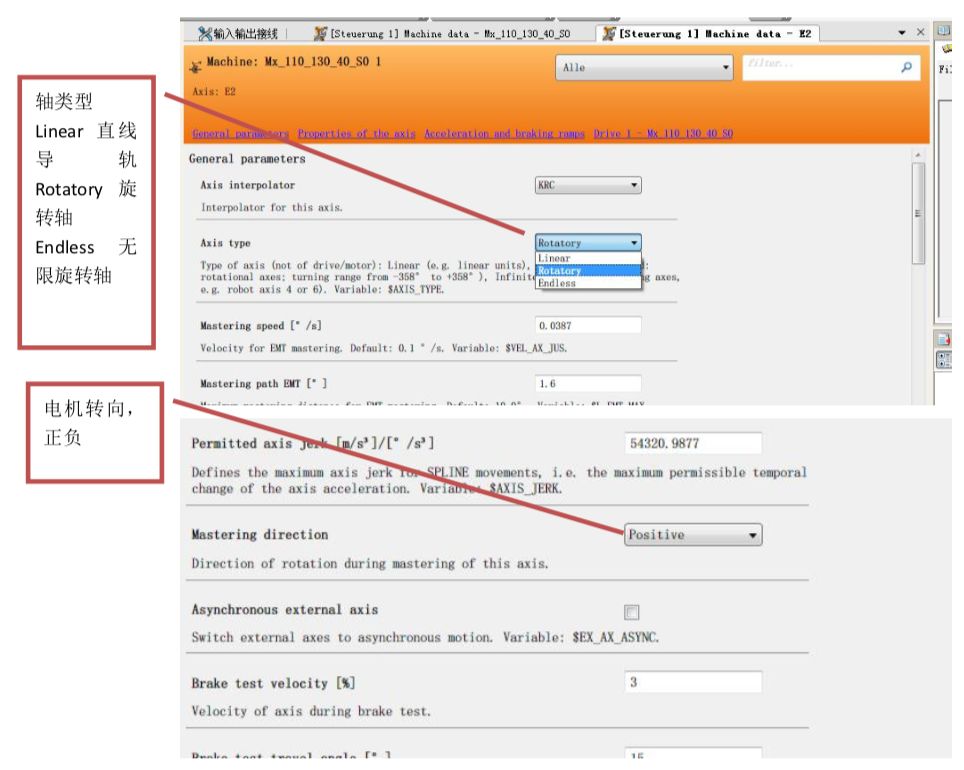
注: 如果需要做耦合,就必须将坐标转换值输入进去,数值由实际 测量得出
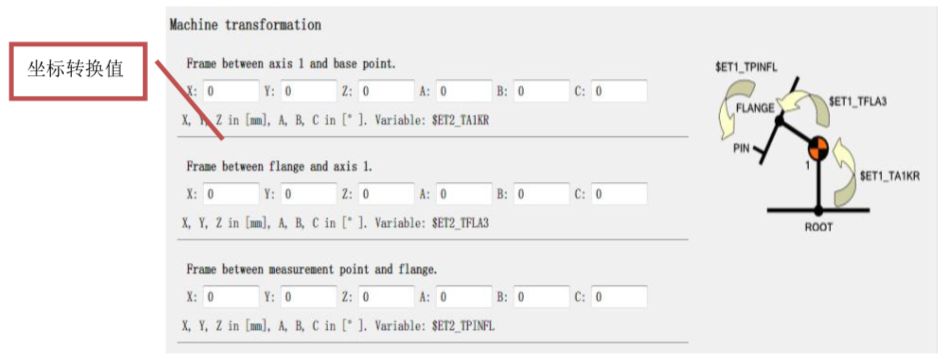
旋转轴配置和上面步骤相同,除了这步:添加完后把 KR60HA_3 拖到 MX_60_110_30_S0 的 FLANGE BASE 下面,如图 8,这步配置旋转轴时不需要执行:文件/名录管理,把所有的文件移至右边。 出现“安全配置的校验总和不正确”故障,执行“配置/安全配置”。
来源:网络,侵删。
官方微信:18969179663
开班详情欢迎咨询


点击下方“
↓↓↓














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









