






Rust 也能实现神经网络?

 Python的实现
我在前一篇帖子中描述了一个非常简单的单层神经网络,其可以利用基于随机梯度下降的学习算法对MNIST数据集中的手写数字进行分类。听起来有点复杂,但实际上只有150行Python代码,以及大量注释。
如果你想深入了解神经网络的基础知识,请仔细阅读我的前一篇帖子。而且请不要只关注代码,理解代码工作原理的细节并不是非常重要,你需要了解Python和Rust的实现差异。
在前一篇帖子中,Python代码的基本数据容器是一个Network类,它表示一个神经网络,其层数和每层神经元数可以自由控制。在内部,Network类由NumPy二维数组的列表表示。该网络的每一层都由一个表示权重的二维数组和一个表示偏差的一维数组组成,分别包含在Network类的属性weights和biases中。两者都是二维数组的列表。偏差是列向量,但仍然添加了一个无用的维度,以二维数组的形式存储。Network类的初始化程序如下所示:
Python的实现
我在前一篇帖子中描述了一个非常简单的单层神经网络,其可以利用基于随机梯度下降的学习算法对MNIST数据集中的手写数字进行分类。听起来有点复杂,但实际上只有150行Python代码,以及大量注释。
如果你想深入了解神经网络的基础知识,请仔细阅读我的前一篇帖子。而且请不要只关注代码,理解代码工作原理的细节并不是非常重要,你需要了解Python和Rust的实现差异。
在前一篇帖子中,Python代码的基本数据容器是一个Network类,它表示一个神经网络,其层数和每层神经元数可以自由控制。在内部,Network类由NumPy二维数组的列表表示。该网络的每一层都由一个表示权重的二维数组和一个表示偏差的一维数组组成,分别包含在Network类的属性weights和biases中。两者都是二维数组的列表。偏差是列向量,但仍然添加了一个无用的维度,以二维数组的形式存储。Network类的初始化程序如下所示:
class Network(object):def __init__(self, sizes):"""The list ``sizes`` contains the number of neurons in the
respective layers of the network. For example, if the list
was [2, 3, 1] then it would be a three-layer network, with the
first layer containing 2 neurons, the second layer 3 neurons,
and the third layer 1 neuron. The biases and weights for the
network are initialized randomly, using a Gaussian
distribution with mean 0, and variance 1. Note that the first
layer is assumed to be an input layer, and by convention we
won't set any biases for those neurons, since biases are only
ever used in computing the outputs from later layers."""
self.num_layers = len(sizes)
self.sizes = sizes
self.biases = [np.random.randn(y, 1) for y in sizes[1:]]
self.weights = [np.random.randn(y, x)for x, y in zip(sizes[:-1], sizes[1:])]def update_mini_batch(self, mini_batch, eta):"""Update the network's weights and biases by applying
gradient descent using backpropagation to a single mini batch.
The ``mini_batch`` is a list of tuples ``(x, y)``, and ``eta``
is the learning rate."""
nabla_b = [np.zeros(b.shape) for b in self.biases]
nabla_w = [np.zeros(w.shape) for w in self.weights]for x, y in mini_batch:
delta_nabla_b, delta_nabla_w = self.backprop(x, y)
nabla_b = [nb+dnb for nb, dnb in zip(nabla_b, delta_nabla_b)]
nabla_w = [nw+dnw for nw, dnw in zip(nabla_w, delta_nabla_w)]self.weights = [w-(eta/len(mini_batch))*nwfor w, nw in zip(self.weights, nabla_w)]self.biases = [b-(eta/len(mini_batch))*nbfor b, nb in zip(self.biases, nabla_b)] Rust的实现
首先,我们需要弄清楚如何加载数据。这个过程非常繁琐,所以我另写了一篇文章专门讨论(https://ngoldbaum.github.io/posts/loading-mnist-data-in-rust/)。在这之后,下一步我们必须弄清楚如何用Rust表示Python代码中的Network类。最终我决定使用struct:
Rust的实现
首先,我们需要弄清楚如何加载数据。这个过程非常繁琐,所以我另写了一篇文章专门讨论(https://ngoldbaum.github.io/posts/loading-mnist-data-in-rust/)。在这之后,下一步我们必须弄清楚如何用Rust表示Python代码中的Network类。最终我决定使用struct:
use ndarray::Array2;
#[derive(Debug)]struct Network {num_layers: usize,
sizes: Vec,
biases: Vec>,
weights: Vec>,
}use rand::distributions::StandardNormal;use ndarray::{Array, Array2};use ndarray_rand::RandomExt;
impl Network {
fn new(sizes: &[usize]) -> Network {
let num_layers = sizes.len();
let mut biases: Vec> = Vec::new();
let mut weights: Vec> = Vec::new();for i in 1..num_layers {
biases.push(Array::random((sizes[i], 1), StandardNormal));
weights.push(Array::random((sizes[i], sizes[i - 1]), StandardNormal));
}
Network {
num_layers: num_layers,
sizes: sizes.to_owned(),
biases: biases,
weights: weights,
}
}
} 整体式包的优点
原则上,最好不要将随机数生成器放到ndarray代码库中,这样当rand函数支持新的随机分布时,ndarray以及Rust生态系统中所有需要随机数的包都会受益。另一方面,这确实会增加一些认知开销,因为没有集中的位置,查阅文档时需要参考多个包的文档。我的情况有点特殊,我没想到做这个项目的时候,恰逢rand发布改变了其公共API的版本。导致ndarray-rand(依赖于rand版本0.6)和我的项目所依赖的版本0.7之间产生了不兼容性。
我听说cargo和Rust的构建系统可以很好地处理这类问题,但至少我遇到了一个非常令人困惑的错误信息:我传入的随机数分布不能满足Distribution这个trait的要求。虽然这话不假——它符合0.7版本的rand,但不符合ndarray-rand要求的0.6版本的rand,但这依然非常令人费解,因为错误信息中没有给出各种包的版本号。最后我报告了这个问题。我发现这些有关API版本不兼容的错误消息是Rust语言长期存在的一个问题。希望将来Rust可以显示更多有用的错误信息。
最后,这种关注点的分离给我这个新用户带来了很大困难。在Python中,我可以简单通过import numpy完成。我确实认为NumPy在整体式上走得太远了(当时打包和分发带有C扩展的Python代码与现在相比太难了),但我也认为在另一个极端上渐行渐远,会导致语言或生态系统的学习难度增大。
整体式包的优点
原则上,最好不要将随机数生成器放到ndarray代码库中,这样当rand函数支持新的随机分布时,ndarray以及Rust生态系统中所有需要随机数的包都会受益。另一方面,这确实会增加一些认知开销,因为没有集中的位置,查阅文档时需要参考多个包的文档。我的情况有点特殊,我没想到做这个项目的时候,恰逢rand发布改变了其公共API的版本。导致ndarray-rand(依赖于rand版本0.6)和我的项目所依赖的版本0.7之间产生了不兼容性。
我听说cargo和Rust的构建系统可以很好地处理这类问题,但至少我遇到了一个非常令人困惑的错误信息:我传入的随机数分布不能满足Distribution这个trait的要求。虽然这话不假——它符合0.7版本的rand,但不符合ndarray-rand要求的0.6版本的rand,但这依然非常令人费解,因为错误信息中没有给出各种包的版本号。最后我报告了这个问题。我发现这些有关API版本不兼容的错误消息是Rust语言长期存在的一个问题。希望将来Rust可以显示更多有用的错误信息。
最后,这种关注点的分离给我这个新用户带来了很大困难。在Python中,我可以简单通过import numpy完成。我确实认为NumPy在整体式上走得太远了(当时打包和分发带有C扩展的Python代码与现在相比太难了),但我也认为在另一个极端上渐行渐远,会导致语言或生态系统的学习难度增大。
 类型和所有权
下面我将详细介绍一下Rust版本的update_mini_batch:
类型和所有权
下面我将详细介绍一下Rust版本的update_mini_batch:
impl Network {fn update_mini_batch(
&mut self,
training_data: &[MnistImage],
mini_batch_indices: &[usize],
eta: f64,) {let mut nabla_b: Vec> = zero_vec_like(&self.biases);let mut nabla_w: Vec> = zero_vec_like(&self.weights);for i in mini_batch_indices {let (delta_nabla_b, delta_nabla_w) = self.backprop(&training_data[*i]);for (nb, dnb) in nabla_b.iter_mut().zip(delta_nabla_b.iter()) {
*nb += dnb;
}for (nw, dnw) in nabla_w.iter_mut().zip(delta_nabla_w.iter()) {
*nw += dnw;
}
}let nbatch = mini_batch_indices.len() as f64;for (w, nw) in self.weights.iter_mut().zip(nabla_w.iter()) {
*w -= &nw.mapv(|x| x * eta / nbatch);
}for (b, nb) in self.biases.iter_mut().zip(nabla_b.iter()) {
*b -= &nb.mapv(|x| x * eta / nbatch);
}
}
}fn to_tuple(inp: &[usize]) -> (usize, usize) {
match inp {
[a, b] => (*a, *b),
_ => panic!(),
}
}
fn zero_vec_like(inp: &[Array2]) -> Vec> {
inp.iter()
.map(|x| Array2::zeros(to_tuple(x.shape())))
.collect()
}let (delta_nabla_b, delta_nabla_w) = self.backprop(&training_data[*i]);for (nb, dnb) in nabla_b.iter_mut().zip(delta_nabla_b.iter()) {
*nb += dnb;
}for (nw, dnw) in nabla_w.iter_mut().zip(delta_nabla_w.iter()) {
*nw += dnw;
}let nbatch = mini_batch_indices.len() as f64;for (w, nw) in self.weights.iter_mut().zip(nabla_w.iter()) {
*w -= &nw.mapv(|x| x * eta / nbatch);
}for (b, nb) in self.biases.iter_mut().zip(nabla_b.iter()) {
*b -= &nb.mapv(|x| x * eta / nbatch);
} 用Rust重新编写,一切都会好起来
到此为止,我用Rust编写的代码运行速度超过了我最初编写的未经优化的Python代码。然而,从Python这样的动态解释语言过渡到Rust这样的性能优先的编译语言,应该能达到10倍或更高性能,然而我只观察到大约2倍的提升。我该如何测量Rust代码的性能?幸运的是,有一个非常优秀的项目flamegraph(https://github.com/ferrous-systems/flamegraph)可以很容易地为Rust项目生成火焰图。这个工具为cargo添加了一个flamegraph子命令,因此你只需运行cargo flamegraph,就可以运行代码,然后写一个flamegraph的svg文件,就可以通过Web浏览器观测。
用Rust重新编写,一切都会好起来
到此为止,我用Rust编写的代码运行速度超过了我最初编写的未经优化的Python代码。然而,从Python这样的动态解释语言过渡到Rust这样的性能优先的编译语言,应该能达到10倍或更高性能,然而我只观察到大约2倍的提升。我该如何测量Rust代码的性能?幸运的是,有一个非常优秀的项目flamegraph(https://github.com/ferrous-systems/flamegraph)可以很容易地为Rust项目生成火焰图。这个工具为cargo添加了一个flamegraph子命令,因此你只需运行cargo flamegraph,就可以运行代码,然后写一个flamegraph的svg文件,就可以通过Web浏览器观测。
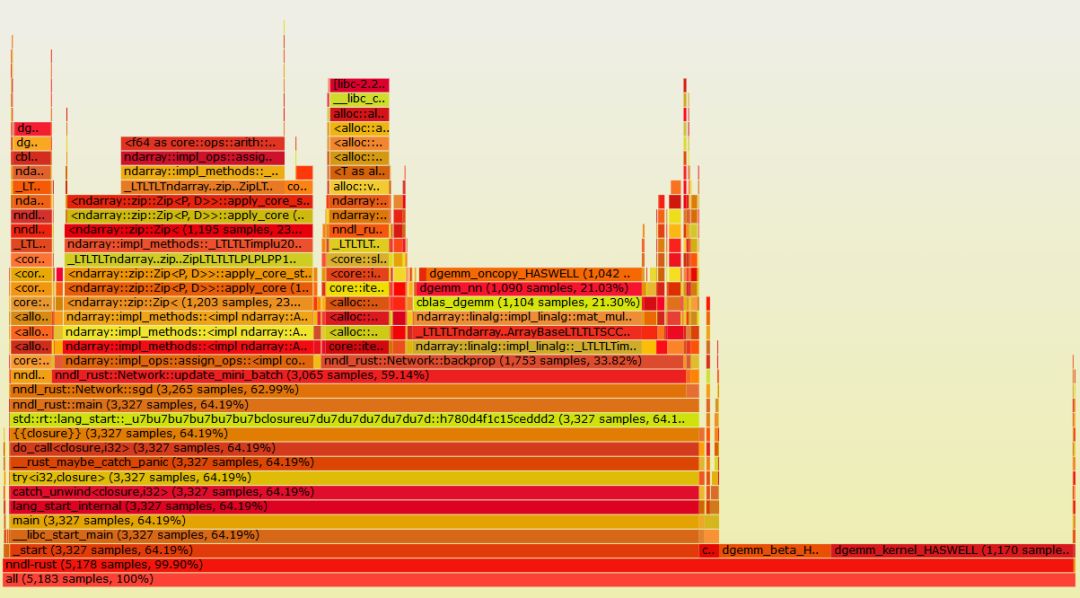 可能你以前从未见过火焰图,因此在此简单地说明一下,例程中程序的运行时间比例与该例程的条形宽度成正比。主函数位于图形的底部,主函数调用的函数堆叠在上面。你可以通过这个图形简单地了解哪些函数在程序中占用的时间最多——图中非常“宽”的函数都在运行中占用了大量时间,而非常高且宽的函数栈都代表其包含非常深入的栈调用,其代码的运行占用了大量时间。通过以上火焰图,我们可以看到我的程序大约一半的时间都花在了dgemm_kernel_HASWELL等函数上,这些是OpenBLAS线性代数库中的函数。其余的时间都花在了`update_mini_batch和分配数组中等数组操作上,而程序中其他部分的运行时间可以忽略不计。
如果我们为Python代码制作了一个类似的火焰图,则也会看到一个类似的模式——大部分时间花在线性代数上(在反向传播例程中调用np.dot)。因此,由于Rust或Python中的大部分时间都花在数值线性代数库中,所以我们永远也无法得到10倍的提速。
实际情况可能比这更糟。上述我提到的书中有一个练习是使用向量化矩阵乘法重写Python代码。在这个方法中,每个小批次中所有图像的反向传播都需要通过一组矢量化矩阵乘法运算完成。这需要在二维和三维数组间运行矩阵乘法。由于每个矩阵乘法运算使用的数据量大于非向量化的情况,因此OpenBLAS能够更有效地使用CPU缓存和寄存器,最终可以更好地利用我的笔记本电脑上的CPU资源。重写的Python版本比Rust版本更快,但也只有大约两倍左右。
原则上,我们可以用相同的方式优化Rust代码,但是ndarray包还不支持高于二维的矩阵乘法。我们也可以利用rayon等库实现小批次更新线程的并行化。我在自己的笔记本电脑上试了试,并没有看到任何提速,但可能更强大的机器有更多CPU线程。我还尝试了使用使用不同的低级线性代数实现,例如,利用Rust版的tensorflow和torch,但当时我觉得我完全可以利用Python版的这些库。
可能你以前从未见过火焰图,因此在此简单地说明一下,例程中程序的运行时间比例与该例程的条形宽度成正比。主函数位于图形的底部,主函数调用的函数堆叠在上面。你可以通过这个图形简单地了解哪些函数在程序中占用的时间最多——图中非常“宽”的函数都在运行中占用了大量时间,而非常高且宽的函数栈都代表其包含非常深入的栈调用,其代码的运行占用了大量时间。通过以上火焰图,我们可以看到我的程序大约一半的时间都花在了dgemm_kernel_HASWELL等函数上,这些是OpenBLAS线性代数库中的函数。其余的时间都花在了`update_mini_batch和分配数组中等数组操作上,而程序中其他部分的运行时间可以忽略不计。
如果我们为Python代码制作了一个类似的火焰图,则也会看到一个类似的模式——大部分时间花在线性代数上(在反向传播例程中调用np.dot)。因此,由于Rust或Python中的大部分时间都花在数值线性代数库中,所以我们永远也无法得到10倍的提速。
实际情况可能比这更糟。上述我提到的书中有一个练习是使用向量化矩阵乘法重写Python代码。在这个方法中,每个小批次中所有图像的反向传播都需要通过一组矢量化矩阵乘法运算完成。这需要在二维和三维数组间运行矩阵乘法。由于每个矩阵乘法运算使用的数据量大于非向量化的情况,因此OpenBLAS能够更有效地使用CPU缓存和寄存器,最终可以更好地利用我的笔记本电脑上的CPU资源。重写的Python版本比Rust版本更快,但也只有大约两倍左右。
原则上,我们可以用相同的方式优化Rust代码,但是ndarray包还不支持高于二维的矩阵乘法。我们也可以利用rayon等库实现小批次更新线程的并行化。我在自己的笔记本电脑上试了试,并没有看到任何提速,但可能更强大的机器有更多CPU线程。我还尝试了使用使用不同的低级线性代数实现,例如,利用Rust版的tensorflow和torch,但当时我觉得我完全可以利用Python版的这些库。
 Rust是否适合数据科学工作流程?
目前,我不得不说答案是“尚未”。如果我需要编写能够将依赖性降到最低的、经过优化的低级代码,那么我肯定会使用Rust。然而,要想利用Rust完全取代Python或C++,那么我们尚需要等待更稳定和更完善的包生态系统。
原文:
https://ngoldbaum.github.io/posts/python-vs-rust-nn/
本文为 CSDN 翻译,转载请注明来源出处。
Rust是否适合数据科学工作流程?
目前,我不得不说答案是“尚未”。如果我需要编写能够将依赖性降到最低的、经过优化的低级代码,那么我肯定会使用Rust。然而,要想利用Rust完全取代Python或C++,那么我们尚需要等待更稳定和更完善的包生态系统。
原文:
https://ngoldbaum.github.io/posts/python-vs-rust-nn/
本文为 CSDN 翻译,转载请注明来源出处。
【End】
热 文 推 荐
☞ 这位博士都 50 多岁了,为啥还在敲代码? ☞C# 导出 Excel 的 6 种简单方法!你会几种? ☞这位博士都 50 多岁了,为啥还在敲代码? ☞ 2019 编程语言排行榜:Java、Python 龙争虎斗!PHP 屹立不倒! ☞ 2亿日活,日均千万级视频上传,快手推荐系统如何应对技术挑战? ☞ Docker容器化部署Python应用 ☞给面试官讲明白:一致性Hash的原理和实践 ☞ 预警,CSW的50万枚尘封BTC即将重返市场? ☞她说:行!没事别嫁程序员!
你点的每个“在看”,我都认真当成了喜欢













 1049
1049











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









