






【写在最前】
常用伙伴问你:有坐标系转换工具吗,转换方法是什么,客户想用~
你的回答:有,工具网很多;算法在GPS工具书《GPS测量与数据处理》(第二版)第296页-网平差原理及质量控制,详述基本数学模型:空间直角坐标系与大地坐标间的微分关系、空间直角坐标与站心直角坐标间的转换。
然后,伙伴横扫坐标系转换公式、WHAT卯酉圈(Prime Vertical)?这怎么搞,然后就没有然后了

[小朋友,你是不是有很多问号???]
这不是我们想要的结局,那就来点干货-轻量代码,110行,直接用,一看就会【公式还豪横吗? 】
】
【正文】
一、方法
//1.经纬高-XYZ形式互转,计算用户位置/原点向量ECEF.
ECEF2blh();
blh2ECEF();
//2.XYZ向量转ENU
ecef2enu();
二、轻量代码-130行(参考rtklib源码)
#define RE_WGS84 6378137.0 /* earth semimajor axis (WGS84) (m) */
#define FE_WGS84 (1.0/298.257223563) /* earth flattening (WGS84) */
#define PI 3.1415926535897932 /* 圆周率 PI */
#define D2R (PI/180.0) /* 度转弧度 deg to rad */
#define R2D (180.0/PI) /* 弧度转度 rad to deg */
/* inner product ---------------------------------------------------------------
* inner product of vectors
* args : double *a,*b I vector a,b (n x 1)
* int n I size of vector a,b
* return : a'*b
*-----------------------------------------------------------------------------*/
extern double dot(const double *a, const double *b, int n)
{
double c=0.0;
while (--n>=0) c+=a[n]*b[n];
return c;
}
/* transform ecef to geodetic postion ------------------------------------------
* transform ecef position to geodetic position
* 将XYZ转换为经纬高BLH
* args : double *r 输入I ecef position {x,y,z} (XYZ数组,单位:m)
* double *pos 输出O geodetic position {lat,lon,h} (BLH数组,单位:度gre,m)
* return : none
* 测试用例
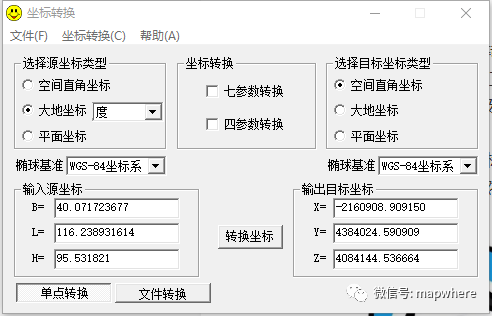
* 输入ECEF -2160908.9091,4384024.5909,4084144.5367
* 输出BLH 40.071723677 ,116.238931614 ,95.531821
* notes : WGS84, ellipsoidal height
*-----------------------------------------------------------------------------*/
extern void ECEF2blh(const double *r, double *pos)
{
double FE_WGS84 = (1.0/298.257223563);
double RE_WGS84 = 6378137.0;
double e2=FE_WGS84*(2.0-FE_WGS84),r2=dot(r,r,2),z,zk,v=RE_WGS84,sinp;
for (z=r[2],zk=0.0;fabs(z-zk)>=1E-4;) {
zk=z;
sinp=z/sqrt(r2+z*z);
v=RE_WGS84/sqrt(1.0-e2*sinp*sinp);
z=r[2]+v*e2*sinp;
}
//计算BLH,其中pos[0]为纬度B,pos[1]为经度L,pos[2]为H。
pos[0]=r2>1E-12?atan(z/sqrt(r2)):(r[2]>0.0?PI/2.0:-PI/2.0);
pos[1]=r2>1E-12?atan2(r[1],r[0]):0.0;
pos[2]=sqrt(r2+z*z)-v;
//弧度专为度单位
pos[0]=pos[0]*R2D;
pos[1]=pos[1]*R2D;
}
/* transform geodetic to ecef position -----------------------------------------
* transform geodetic position to ecef position
* args : double *pos 输入I geodetic position {lat,lon,h} (经纬高,单位:度,m)
* double *r 输出O ecef position {x,y,z} (XYZ,单位:m)
* return : none
* BLH转XYZ
* 测试用例
* 输入BLH 40.071723677 ,116.238931614 ,95.531821
* 输出ECEF -2160908.9091,4384024.5909,4084144.5367
* notes : WGS84, ellipsoidal height
*-----------------------------------------------------------------------------*/
extern void blh2ECEF(const double *blh, double *r)
{
double pos[3]={0,0,0};
/* 度转弧度 */
pos[0]=blh[0]*D2R;
pos[1]=blh[1]*D2R;
pos[2]=blh[2];
double sinp=sin(pos[0]),cosp=cos(pos[0]),sinl=sin(pos[1]),cosl=cos(pos[1]);
double e2=FE_WGS84*(2.0-FE_WGS84),v=RE_WGS84/sqrt(1.0-e2*sinp*sinp);
//计算XYZ
r[0]=(v+pos[2])*cosp*cosl;
r[1]=(v+pos[2])*cosp*sinl;
r[2]=(v*(1.0-e2)+pos[2])*sinp;
}
/* 矩阵相乘 multiply matrix -----------------------------------------------------------*/
extern void matmul(const char *tr, int n, int k, int m, double alpha,
const double *A, const double *B, double beta, double *C)
{
double d;
int i,j,x,f=tr[0]=='N'?(tr[1]=='N'?1:2):(tr[1]=='N'?3:4);
for (i=0;i
d=0.0;
switch (f) {
case 1: for (x=0;x
case 2: for (x=0;x
case 3: for (x=0;x
case 4: for (x=0;x
}
if (beta==0.0) C[i+j*n]=alpha*d; else C[i+j*n]=alpha*d+beta*C[i+j*n];
}
}
/* ECEF转ENU参数 ecef to local coordinate transfromation matrix ------------------------------
* compute ecef to local coordinate transfromation matrix
* args : double *pos I geodetic position {lat,lon} (rad)
* double *E O ecef to local coord transformation matrix矩阵 (3x3)
* return : none
* notes : matirix stored by column-major order (fortran convention)
*-----------------------------------------------------------------------------*/
extern void xyz2enu(const double *pos, double *E)
{
double sinp=sin(pos[0]),cosp=cos(pos[0]),sinl=sin(pos[1]),cosl=cos(pos[1]);
E[0]=-sinl; E[3]=cosl; E[6]=0.0;
E[1]=-sinp*cosl; E[4]=-sinp*sinl; E[7]=cosp;
E[2]=cosp*cosl; E[5]=cosp*sinl; E[8]=sinp;
}
/* transform ecef vector to local tangental coordinate -------------------------
* transform ecef vector to local tangental coordinate
* args : double *pos I geodetic position {lat,lon} (rad) 原点经纬度(单位:弧度、弧度、m)
* double *r I vector in ecef coordinate {x,y,z} 用户位置与原点向量ECEF(单位:m)
* double *e O vector in local tangental coordinate {e,n,u} 返回值:ENU(单位:m)
* return : none
*-----------------------------------------------------------------------------*/
extern void ecef2enu(const double *pos, const double *r, double *e)
{
double E[9];
xyz2enu(pos,E);
matmul("NN",3,1,3,1.0,E,r,0.0,e);
}

你不是很豪横吗?
[下载链接]
正文代码链接
链接: https://pan.baidu.com/s/1Pwmj53-FaD4tkeoLXfCFQg 提取码: bh8c
坐标系转换小工具(笑脸)链接:
链接: https://pan.baidu.com/s/1fdkUGhYZOpS4ob5pqDSmyw 提取码: 13r6














 2866
2866











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









