






 本文介绍了MIT四足机器人Cheetah 3使用Convex Model-Predictive Control (MPC)进行动态平衡控制的技术细节。通过对机器人的状态变量、模型简化、运动方程及离散化过程的分析,阐述了如何将控制问题转化为Quadratic Programming (QP)问题,并讨论了权重矩阵Q和R对控制效果的影响。
本文介绍了MIT四足机器人Cheetah 3使用Convex Model-Predictive Control (MPC)进行动态平衡控制的技术细节。通过对机器人的状态变量、模型简化、运动方程及离散化过程的分析,阐述了如何将控制问题转化为Quadratic Programming (QP)问题,并讨论了权重矩阵Q和R对控制效果的影响。
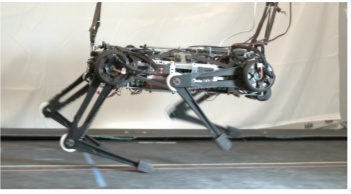
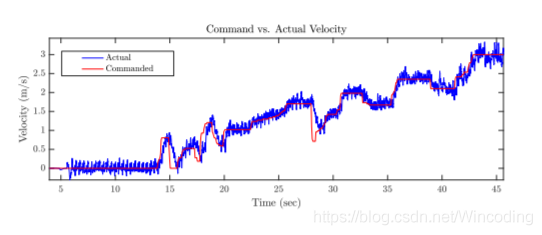
在“MIT四足机器人Cheetah 3控制方案理解笔记(1)”中,主要简单的总结了下一般情况下腿足机器人的摆动腿控制方法以及Cheetah 3的基于集中质量模型的平衡控制器。此外,MIT还在Cheetah 3以及Mini Cheetah上采用了Convex MPC平衡控制器,在其2018年论文《Dynamic Locomotion in the MIT Cheetah 3 Through Convex Model-Predictive Control》中,Cheetah 3通过Convex MPC平衡控制器达到了3m/s的奔跑速度:
为了将论文中的方案部署到自己的腿足机器人上,笔者此处依次从问题分析、模型简化、方程列写、QP表达形式组织等谈谈自己对这篇论文的一些理解。
1)首先是描述机器人状态的主要变量的选取。对于机器人自身运动状态的描述,姿态以及位置层面,可以使用姿态角(roll ,pitch,yaw)和质心位置(x,y,z)来描述,同时为了描述其运动层面,可以加入姿态角角速度以及机器人质心的运动速度。因此,在机器人状态描述层面,共有姿态角、质心位置、姿态角角速度、质心速度共12个量描述。在外界输入层面,现今大多腿足机器人的MPC都是规划质心轨迹,而后采用逆动力学跟随质心轨迹。但这种方法在实际工程操作中,首先是逆动力学求解难度大,其次在机器人存在空中相时,也很难保证能够跟随所规划的质心轨迹,出于力控的角度,更理想的应该是直接规划出关节力矩,亦或能够在其基础上较简单的求出各关节力矩。
2)大致确定了我们希望的状态描述量以及需要规划的量,此处之前提过的单刚体模型恰好满足这些条件,单刚体模型的运动方程如下:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









