





导语:各种测距方法很多,目前应用较多的主要有PSD测距法、超声时间法、带运动机构的双像比较法和反射能量法。
PSD测距法
利用三角测距原理,用一种称之为位置敏感器件(Position Sensitive Device)的PSD元件来获得两路输出信号,根据这两路信号来获得物体的距离量值。
超声时间法
测量一束超声波从发射到反射回仪器的时间来判断被测距离。
带运动机构的双像比较法
这种方法比较复杂,系统中有两套光路对被测物体成像,其中一套光路是经过可运动的反光镜获得的,接收系统及时比较两套光路来的图像,当二者一致时,就可根据可运动反光镜的位置来获得物体的距离信息。
反射能量法
仪器发射一束光(通常是近红外光)照射到被测物体表面,仪器同时接收被测物体的反射光能量,根据接收到的反射光能量来判断被测物体的距离。在红外测距系统中就是采用反射能量法。
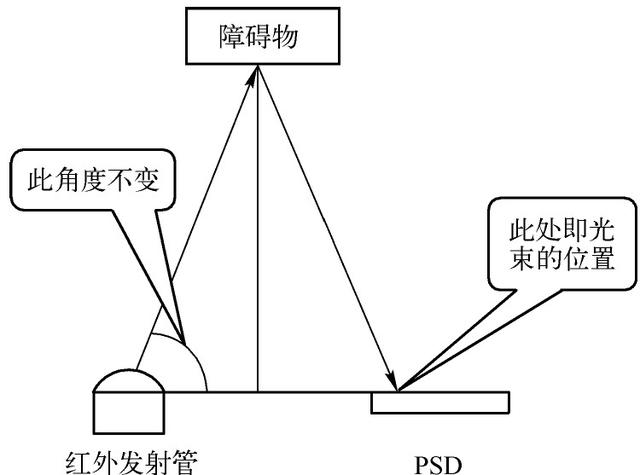
红外传感器的测距基本原理为红外发射电路的红外发光管发出红外光,经障碍物反射后,由红外接收电路的光敏接收管接收前方物体反射光,据此判断前方是否有障碍物。根据反射光的强弱可以判断物体的距离,因为接收管接收的光强是随反射物体的距离变化而变化的,因而,距离近则反射光强,距离远则反射光弱。
因为红外线是介于可见光和微波之间的一种电磁波,因此,它不仅具有可见光直线传播、反射、折射等特性,还具有微波的某些特性,如较强的穿透能力和能贯穿某些不透明物质等。红外传感器包括红外发射器件和红外接收器件。自然界的所有物体只要温度高于绝对零度都会辐射红外线,因而,红外传感器须具有更强的发射和接收能力。
红外发射管发出的光束,遇到障碍物反射回来,落在PSD上,构成了一个等腰三角形,借助于PSD可以测得三角形的底,而两个底是固定的,由发射管确定,此时便可以通过底边推算出高,即我们所测的距离。这个实际距离如何得到呢?下面我们来进行详细介绍。
下图为GP2D12红外线测距传感器的电压值与距离值的关系曲线,从这个曲线可以看出,电压输出与距离成反比,而且是非线性关系。
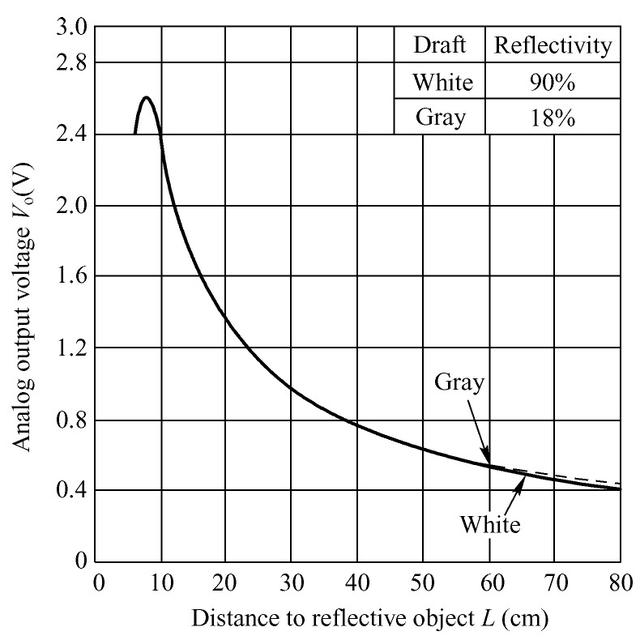
根据上图关系曲线,大约10cm距离时有2.55V输出,80cm距离时有0.42V输出。可以通过该曲线拟合出电压值与距离值的数学关系式,但是这个关系式里的距离是参考距离值,实际距离值=(参考距离值-0.42)cm。另外,由M128的ADC模拟通道采样传感器的信息,采样的数据范围是0~1023,对应的电压范围是0~5V,每格数据代表0.004 9V,于是读取的有效数据应该由86(0.42V)~520(2.548V)。所以最终可以推导出实际距离与采样数据之间的关系式为:
实际距离=2 547.8/((float)采样数据×0.49-10.41)-0.42














 2483
2483











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









