





学好线性代数矩阵论需要的不是逻辑思维,而是“内存”。本篇整理几个内存消耗大的公式,方便速查。
 (a)
(a)
我一般喜欢举一个具体的实例,类似数学归纳法,总是从n = 1开始。这里可以用3×3的矩阵。
首先矩阵×向量有一种内存小的记法:

上式a是A的列向量,  是向量 x 的元素(标量)。
是向量 x 的元素(标量)。
式(a)的左边

上式乘积的对角元素为



式(a)的右边

得证。
 是正定矩阵,其中
是正定矩阵,其中  为可逆矩阵(nonsingular,行列式!=0),即存在
为可逆矩阵(nonsingular,行列式!=0),即存在  。
。
观察上述矩阵,只有对角线的元素是平方和,其他元素正负未知。那么正定矩阵的定义是神马?对于任意非零向量  ,
,

那么, 
以上,我们接触了两个内存容易溢出的矩阵知识点,1是trace,2是二次型。下面开始看矩阵求导。
关于矩阵导数的几个定义
1、向量y对向量x的导数。若
 :
:
where y is an m-element vector, and x is an n-element vector. The symbol
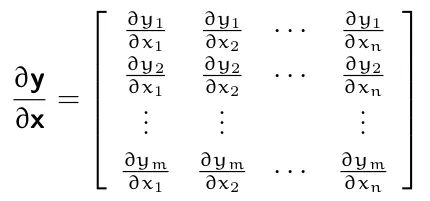
上式矩阵还称为线性变换  的Jacobian matrix。
的Jacobian matrix。
以上常用于求解Ax = b的问题。
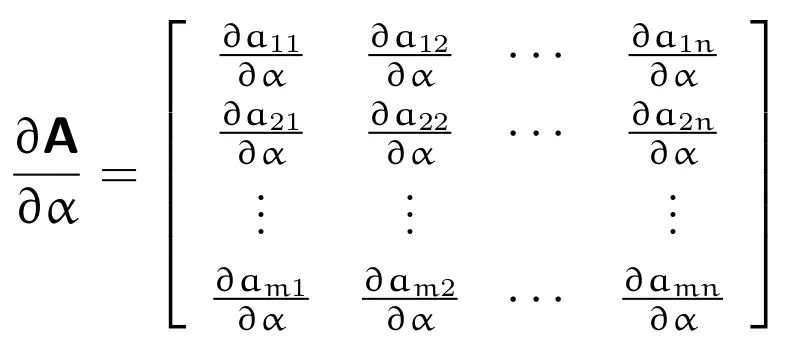
2、矩阵A对标量变量  的导数
的导数
3、标量L对矩阵W的导数,定义为 ,常应用于神经网络损失函数对系数矩阵的导数。
,常应用于神经网络损失函数对系数矩阵的导数。

一般数学定义强记硬背是必须的,理解随意。
举几个例子,二维的高斯函数 
 或写成顺眼的形式
或写成顺眼的形式 
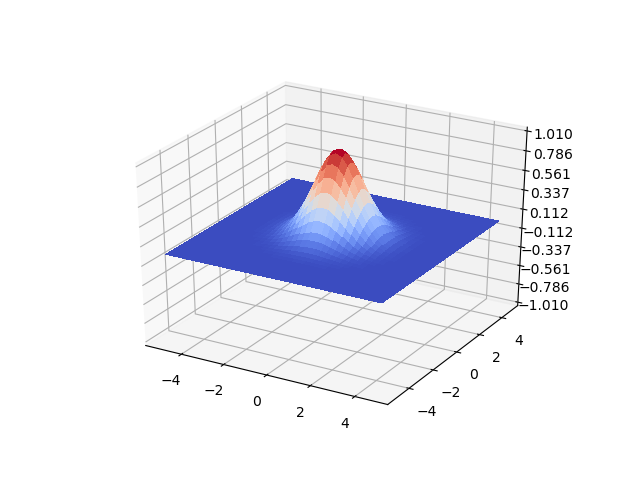
梯度函数  ,同样看我们熟悉的三维情形
,同样看我们熟悉的三维情形  ,其梯度为
,其梯度为

即函数在x方向上和y方向上的梯度分量,总梯度向量叠加即可:

下面记几个公式
let y is m×1, x is n×1, A is m×n,

then
 (公式1)
(公式1)
证明:

it follows that

for all i = 1, 2, ..., m, j = 1, 2, ..., n. Hence
得证。
y is m×1, x is n×1, A is m×n, z is l×1,
Suppose that x is a function of the vector z, while A is independent of z. then
 (公式2)
(公式2)
证明
for all i = 1, 2, ... , m, it follows that

右边是  的元素(i, j)。那么,求导的链式法则在这里也apply,
的元素(i, j)。那么,求导的链式法则在这里也apply,

根据定义1,  是n×l矩阵,
是n×l矩阵,  是m×l矩阵。
是m×l矩阵。
标量 定义为

式中 b 为m×1, x 为n×1, A 为 m×n, 有
 (公式3.1)
(公式3.1)
and
 (公式3.2)
(公式3.2)
证明
根据公式(1),设  ,公式3.1得证。
,公式3.1得证。
另一方面,标量的转置是标量本身,

又根据公式(1),公式3.2得证。
标量 可以由二次型得出

where x is n×1, and A is n×n, then
 (公式4)
(公式4)
证明:
由定义

即二次型遍历了矩阵所有元素,而元素的加权是下标对应的  ,那么对元素
,那么对元素  求导
求导

对于k = 1, 2, ... , n,

quod erat demonstrandum.
求导综合算例
证明最小二乘解,A is m×n, x is n×1, b is m×1,


Proof:


上式中间两项相等(一个标量),那么求导得
 (*)
(*)
上式等于0,得到

两边转置得

得证。漏了一点,  的二阶导数须
的二阶导数须 才是最小值。那么式(*)的导数为(转置求导后再转置回来) 是正定矩阵。
才是最小值。那么式(*)的导数为(转置求导后再转置回来) 是正定矩阵。
矩阵不是终点,张量才是。张量无疑需要更大的内存。无论是矩阵还是张量,有一类向量化操作(vectorization) , defining


with  ,
,  ,and writing the problem in the form
,and writing the problem in the form  ,where
,where  is given by
is given by















 2918
2918











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









