





本篇文章将介绍二维的Graham扫描算法和它的源码实现。
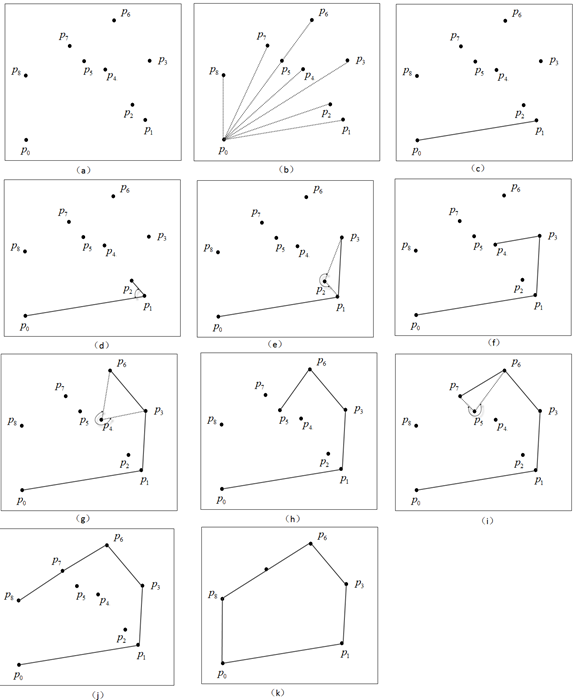
Graham扫描算法会先将点按照极角的大小顺序排列,接着按顺序遍历每个点,通过夹角的大小判断哪些点在凸包上,算法的伪码如下所示:
求给定二维点集的凸包
- 求出最左下角的点,即
分量的值最小点,若
分量值最小的点有多个,取
分量最小的点,设为
;
- 剩下的点集,根据极角大小,逆时针排序,得到
;
- 令栈
为空,用
表示栈中第
个元素,用
表示栈中的元素个数;若栈中有
个元素,则
即为栈顶元素;每一次PUSH}操作,栈元素个数
加1;每次POP操作,栈元素个数
减1;
- PUSH(
,
);
- PUSH(
,
);
- for(
;
;
)
- while (
&& 由
,
和
的夹角
)
- POP(
);
- end while;
- end for;
- if
, then
- 点集无法生成一个凸包;
- else
- 栈
中的
个元素,就是凸包的顶点;
- end if;
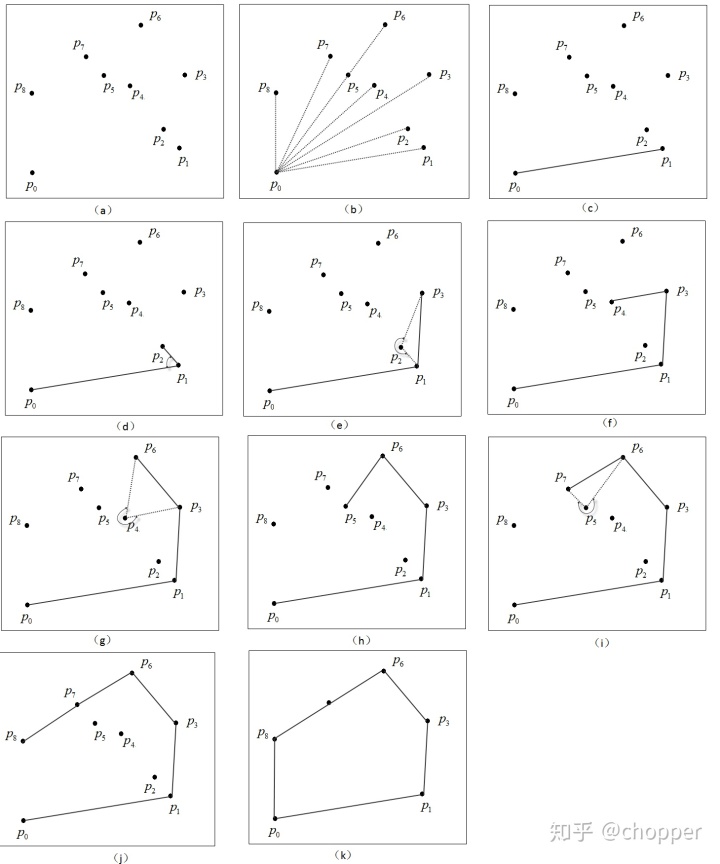
以如图1(a)所示为例,给定一个点集,
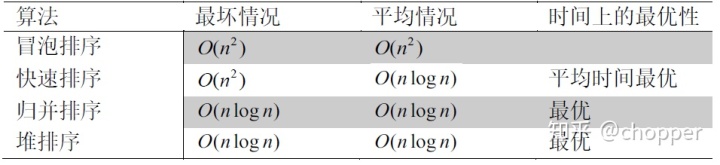
对于对极点的排序,有多种算法实现,比如冒泡排序,快速排序,堆排序等,各种排序的性能对比,如表1的总结。若采用冒泡排序,则Graham扫描算法的复杂度将达到
基础库源码链接,参见这里,下面是前面所描述的算法的实现。
#include 













 2404
2404











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









