





首先用栅格法描述机器人工作环境,在此基础上,将机器人路径表示为粒子位置的二进制编码,并以路径长度为适应值,产生初始种群后,再对粒子位置和速度进行更新,经过多次迭代,即可获得从起始点到目标点的一条全局最优路径.
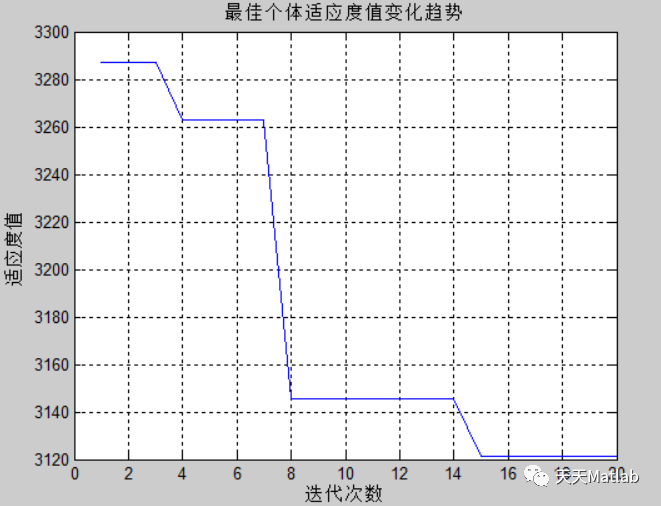
clc;close allclearload('data4.mat')figure(1)%画障碍图hold onS=(S_coo(2)-0.5)*num_shange+(S_coo(1)+0.5);%起点对应的编号E=(E_coo(2)-0.5)*num_shange+(E_coo(1)+0.5);%终点对应的编号for i=1:num_shange for j=1:num_shange if sign(i,j)==1 y=[i-1,i-1,i,i]; x=[j-1,j,j,j-1]; h=fill(x,y,'k'); set(h,'facealpha',0.5) end s=(num2str((i-1)*num_shange+j)); %text(j-0.95,i-0.5,s,'fontsize',6) endendaxis([0 num_shange 0 num_shange])%限制图的边界plot(S_coo(2),S_coo(1), 'p','markersize', 10,'markerfacecolor','b','MarkerEdgeColor', 'm')%画起点plot(E_coo(2),E_coo(1),'o','markersize', 10,'markerfacecolor','g','MarkerEdgeColor', 'c')%画终点set(gca,'YDir','reverse');%图像翻转for i=1:num_shange plot([0 num_shange],[i-1 i-1],'k-'); plot([i i],[0 num_shange],'k-');%画网格线endPopSize=20;%种群大小OldBestFitness=0;%旧的最优适应度值gen=0;%迭代次数maxgen =20;%最大迭代次数c1=0.5;%认知系数c2=0.7;%社会学习系数w=0.96;%惯性系数%%%初始化路径w_min=0.5;w_max=1;Group=ones(num_point,PopSize); %种群初始化for i=1:PopSize p_lin=randperm(num_point)';%随机生成1*400不重复的行向量 %% 将起点编号放在首位 index=find(p_lin==S); lin=p_lin(1); p_lin(1)=p_lin(index); p_lin(index)=lin; Group(:,i)=p_lin; %%将每个个体进行合理化处理 [Group(:,i),flag]=deal_fun(Group(:,i),num_point,liantong_point,E,num_shange); while flag==1%如处理不成功,则初始化个体,重新处理 p_lin=randperm(num_point)'; index=find(p_lin==S); lin=p_lin(1); p_lin(1)=p_lin(index); p_lin(index)=lin; Group(:,i)=p_lin; [Group(:,i),flag]=deal_fun(Group(:,i),num_point,liantong_point,E,num_shange); endend%最优解route=Group(:,end)';index1=find(route==E);route_lin=route(1:index1);for i=2:index1 Q1=[mod(route_lin(i-1)-1,num_shange)+1-0.5,ceil(route_lin(i-1)/num_shange)-0.5]; Q2=[mod(route_lin(i)-1,num_shange)+1-0.5,ceil(route_lin(i)/num_shange)-0.5]; plot([Q1(1),Q2(1)],[Q1(2),Q2(2)],'b-.','LineWidth',3);hold on endtitle('粒子群算法-随机路线');title('粒子群算法-随机路线');figure(2)hold onfor i=1:num_shange for j=1:num_shange if sign(i,j)==1 y=[i-1,i-1,i,i]; x=[j-1,j,j,j-1]; h=fill(x,y,'k'); set(h,'facealpha',0.5) end s=(num2str((i-1)*num_shange+j)); text(j-0.95,i-0.5,s,'fontsize',6) endendaxis([0 num_shange 0 num_shange])%限制图的边界plot(S_coo(2),S_coo(1), 'p','markersize', 10,'markerfacecolor','b','MarkerEdgeColor', 'm')%画起点plot(E_coo(2),E_coo(1),'o','markersize', 10,'markerfacecolor','g','MarkerEdgeColor', 'c')%画终点set(gca,'YDir','reverse');%图像翻转for i=1:num_shange plot([0 num_shange],[i-1 i-1],'k-'); plot([i i],[0 num_shange],'k-');%画网格线endfor i=2:index1 Q1=[mod(route_lin(i-1)-1,num_shange)+1-0.5,ceil(route_lin(i-1)/num_shange)-0.5]; Q2=[mod(route_lin(i)-1,num_shange)+1-0.5,ceil(route_lin(i)/num_shange)-0.5]; plot([Q1(1),Q2(1)],[Q1(2),Q2(2)],'b-.','LineWidth',3)end%初始化粒子速度(即交换序)Velocity =zeros(num_point,PopSize); for i=1:PopSize Velocity(:,i)=round(rand(1,num_point)'*num_point/10); %round取整end%计算每个个体对应路径的距离for i=1:PopSize EachPathDis(i) = PathDistance(Group(:,i)',E,num_shange);endIndivdualBest=Group;%记录各粒子的个体极值点位置,即个体找到的最短路径IndivdualBestFitness=EachPathDis;%记录最佳适应度值,即个体找到的最短路径的长度[GlobalBestFitness,index]=min(EachPathDis);%找出全局最优值和相应序号%寻优while gen < maxgen w=w_max-(w_max-w_min)*gen/maxgen; %迭代次数递增 gen = gen +1 %更新全局极值点位置,这里指路径 for i=1:PopSize GlobalBest(:,i) = Group(:,index); end %求pij-xij ,pgj-xij交换序,并以概率c1,c2的保留交换序 pij_xij=GenerateChangeNums(Group,IndivdualBest); %根据个体最优解求交换序 pij_xij=HoldByOdds(pij_xij,c1);%以概率c1保留交换序 pgj_xij=GenerateChangeNums(Group,GlobalBest);%根据全局最优解求交换序 pgj_xij=HoldByOdds(pgj_xij,c2);%以概率c2保留交换序 %以概率w保留上一代交换序 Velocity=HoldByOdds(Velocity,w); Group = PathExchange(Group,Velocity); %根据交换序进行路径交换 Group = PathExchange(Group,pij_xij); Group = PathExchange(Group,pgj_xij); for i = 1:PopSize [Group(:,i),flag]=deal_fun(Group(:,i),num_point,liantong_point,E,num_shange); while flag==1 p_lin=randperm(num_point)'; index=find(p_lin==S); lin=p_lin(1); p_lin(1)=p_lin(index); p_lin(index)=lin; Group(:,i)=p_lin; [Group(:,i),flag]=deal_fun(Group(:,i),num_point,liantong_point,E,num_shange); end end for i = 1:PopSize % 更新各路径总距离 EachPathDis(i) = PathDistance(Group(:,i)',E,num_shange); end IsChange = EachPathDis IndivdualBest(:, find(IsChange)) = Group(:, find(IsChange));%更新个体最佳路径 IndivdualBestFitness = IndivdualBestFitness.*( ~IsChange) + EachPathDis.*IsChange;%更新个体最佳路径距离 [GlobalBestFitness, index] = min(IndivdualBestFitness);%更新全局最佳路径,记录相应的序号 if GlobalBestFitness~=OldBestFitness %比较更新前和更新后的适应度值; OldBestFitness=GlobalBestFitness;%不相等时更新适应度值 best_route=IndivdualBest(:,index)'; end BestFitness(gen) =GlobalBestFitness;%每一代的最优适应度end%最优解index1=find(best_route==E);route_lin=best_route(1:index1);for i=2:index1 Q1=[mod(route_lin(i-1)-1,num_shange)+1-0.5,ceil(route_lin(i-1)/num_shange)-0.5]; Q2=[mod(route_lin(i)-1,num_shange)+1-0.5,ceil(route_lin(i)/num_shange)-0.5]; plot([Q1(1),Q2(1)],[Q1(2),Q2(2)],'r','LineWidth',3)endfor i=1:PopSize p_lin=randperm(num_point)';%随机生成1*400不重复的行向量 %% 将起点编号放在首位 index=find(p_lin==S); lin=p_lin(1); p_lin(1)=p_lin(index); p_lin(index)=lin; Group(:,i)=p_lin; %%将每个个体进行合理化处理 [Group(:,i),flag]=deal_fun(Group(:,i),num_point,liantong_point,E,num_shange); while flag==1%如处理不成功,则初始化个体,重新处理 p_lin=randperm(num_point)'; index=find(p_lin==S); lin=p_lin(1); p_lin(1)=p_lin(index); p_lin(index)=lin; Group(:,i)=p_lin; [Group(:,i),flag]=deal_fun(Group(:,i),num_point,liantong_point,E,num_shange); endend%最优解route=Group(:,end)';index3=find(route==E);route_lin1=route(1:index3);for i=2:index3 Q1=[mod(route_lin1(i-1)-1,num_shange)+1-0.5,ceil(route_lin1(i-1)/num_shange)-0.5]; Q2=[mod(route_lin1(i)-1,num_shange)+1-0.5,ceil(route_lin1(i)/num_shange)-0.5]; plot([Q1(1),Q2(1)],[Q1(2),Q2(2)],'c-.','LineWidth',3);hold onendfor i=1:PopSize p_lin=randperm(num_point)';%随机生成1*400不重复的行向量 %% 将起点编号放在首位 index=find(p_lin==S); lin=p_lin(1); p_lin(1)=p_lin(index); p_lin(index)=lin; Group(:,i)=p_lin; %%将每个个体进行合理化处理 [Group(:,i),flag]=deal_fun(Group(:,i),num_point,liantong_point,E,num_shange); while flag==1%如处理不成功,则初始化个体,重新处理 p_lin=randperm(num_point)'; index=find(p_lin==S); lin=p_lin(1); p_lin(1)=p_lin(index); p_lin(index)=lin; Group(:,i)=p_lin; [Group(:,i),flag]=deal_fun(Group(:,i),num_point,liantong_point,E,num_shange); endend%最优解route=Group(:,end)';index2=find(route==E);route_lin2=route(1:index2);for i=2:index2 Q1=[mod(route_lin2(i-1)-1,num_shange)+1-0.5,ceil(route_lin2(i-1)/num_shange)-0.5]; Q2=[mod(route_lin2(i)-1,num_shange)+1-0.5,ceil(route_lin2(i)/num_shange)-0.5]; plot([Q1(1),Q2(1)],[Q1(2),Q2(2)],'m-.','LineWidth',3);hold onendtitle('粒子群算法-对比路线');figure(3)hold onfor i=1:num_shange for j=1:num_shange if sign(i,j)==1 y=[i-1,i-1,i,i]; x=[j-1,j,j,j-1]; h=fill(x,y,'k'); set(h,'facealpha',0.5) end s=(num2str((i-1)*num_shange+j)); text(j-0.95,i-0.5,s,'fontsize',6) endendaxis([0 num_shange 0 num_shange])%限制图的边界plot(S_coo(2),S_coo(1), 'p','markersize', 10,'markerfacecolor','b','MarkerEdgeColor', 'm')%画起点plot(E_coo(2),E_coo(1),'o','markersize', 10,'markerfacecolor','g','MarkerEdgeColor', 'c')%画终点set(gca,'YDir','reverse');%图像翻转for i=1:num_shange plot([0 num_shange],[i-1 i-1],'k-'); plot([i i],[0 num_shange],'k-');%画网格线endfor i=2:index1 Q1=[mod(route_lin(i-1)-1,num_shange)+1-0.5,ceil(route_lin(i-1)/num_shange)-0.5]; Q2=[mod(route_lin(i)-1,num_shange)+1-0.5,ceil(route_lin(i)/num_shange)-0.5]; plot([Q1(1),Q2(1)],[Q1(2),Q2(2)],'r','LineWidth',3)endtitle('粒子群算法-最优路线');%进化曲线figure(4);plot(BestFitness);xlabel('迭代次数')ylabel('适应度值')grid on;title('进化曲线');disp('粒子群算法-最优路线方案:')disp(num2str(route_lin))disp(['起点到终点的距离:',num2str(BestFitness(end))]);figure(5);plot(BestFitness*100);xlabel('迭代次数')ylabel('适应度值')grid on;title('最佳个体适应度值变化趋势');function [path, fitness] = fun_dijstra( pop, A, dij )path =[];for i=1:length(pop)-1% path1 = find_path2(pop(i), pop(i+1), A); % 找路径 path1 = dijkstra(pop(i), pop(i+1), dij); % 找路径 path = [path,path1];end% 删除重复的节点index=[];for i=1:length(path)-1 if(path(i)==path(i+1)) index=[index,i]; endendpath(index)=[];fitness = ca_tsp(path,dij);function [r_path, r_cost] = dijkstra(pathS, pathE, transmat)% The Dijkstra's algorithm, Implemented by Yi Wang, 2005% pathS: 所求最短路径的起点% pathE :所求最短路径的终点% transmat: 图的转移矩阵或者邻接矩阵,应为方阵if ( size(transmat,1) ~= size(transmat,2) ) error( 'detect_cycles:Dijkstra_SC', ... 'transmat has different width and heights' );end% 初始化:% noOfNode-图中的顶点数% parent(i)-节点i的父节点% distance(i)-从起点pathS的最短路径的长度% queue-图的广度遍历noOfNode = size(transmat, 1);for i = 1:noOfNode parent(i) = 0; % 初值操作 distance(i) = Inf; % 初值操作endqueue = []; % 队列% 由路径开始最短路计算for i=1:noOfNode if transmat(pathS, i)~=Inf distance(i) = transmat(pathS, i); parent(i) = pathS; % 当前路径 queue = [queue i]; endend% 对图进行广度遍历while length(queue) ~= 0 hopS = queue(1); queue = queue(2:end); for hopE = 1:noOfNode if distance(hopE) > distance(hopS) + transmat(hopS,hopE) % 如果当前距离大于转换后的距离 distance(hopE) = distance(hopS) + transmat(hopS,hopE); % 更新 parent(hopE) = hopS; queue = [queue hopE]; end end end% 回溯进行最短路径的查找r_path = [pathE]; i = parent(pathE);while i~=pathS && i~=0 r_path = [i r_path]; i = parent(i);endif i==pathS r_path = [i r_path]; % 记录else r_path = [] % 清空end% 返回最短路径的权和r_cost = distance(pathE);% ca_tsp.m% 计算路径长度function ltsp=ca_tsp(c,dij) i=1; ltsp=0; while i ltsp=ltsp+dij(c(i),c(i+1)); i=i+1; endend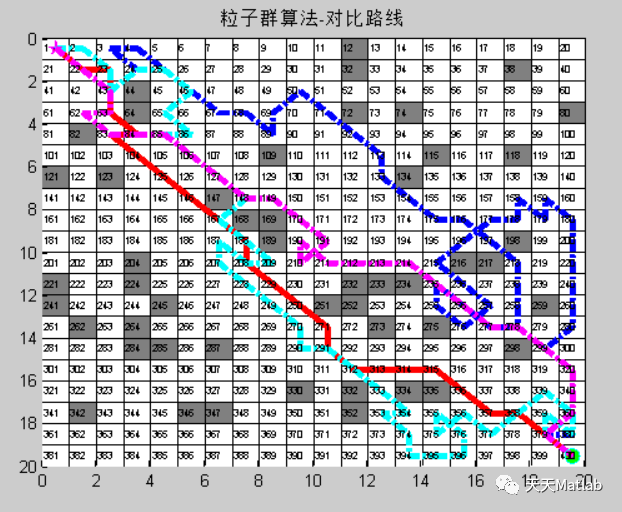
往期回顾>>>>>>
【模式识别】Matlab指纹识别【优化求解】A*算法解决三维路径规划问题【优化求解】模拟退火遗传实现带时间窗的车辆路径规划问题【数学建模】Matlab实现SEIR模型【优化求解】基于NSGA-2的求解多目标柔性车间调度算法 【优化求解】蚁群算法求最优值 【图像处理】粒子群算法结合模糊聚类分割算法实现图像的分割 【优化算法】基于粒子群算法的充电站最优布局 【优化求解】粒子群算法之电线布局优化 【优化求解】遗传算法解决背包问题 完整代码输入 源代码















 1807
1807











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









