











文章发布于公号【数智物语】 (ID:decision_engine),关注公号不错过每一篇干货。
来源 | AI科技评论(id:aitechtalk)
大规模的目标检测数据集(例如MS-COCO)在进行Ground Truth框标注时仍然存在歧义。这篇论文提出了新的边界框回归损失针对目标框的移动以及位置方差进行学习,这种方法在几乎不增加计算量的基础上提高不同结构定位的准确性。另一个关键点是,由于学习了bounding box的分布,可以将其应用在NMS阶段合并相邻目标框,进一步提升定位的准确性。代码已开源。
01研究背景
在大规模目标检测数据集中,一些场景下目标框的标注是存在歧义的,这种情况如果直接使用以前目标检测的边界框回归损失,也即是Smooth L1Loss会出现学习很不稳定,学习的损失函数大的问题。Figure 1展示了哪些场景可能存在目标框标注不准确的情况:
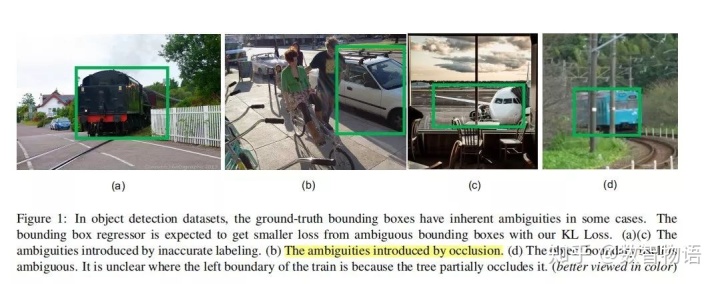
(a,c)框的标记不准确。(b)由遮挡引起的歧义。(d)图片物体不完整,不明确物体的边界在哪里。目标检测包含分类以及定位,是一个多任务的学习问题。Faster R-CNN,Cascade R-CNN及Mask R-CNN依靠边界框回归来进行目标定位。
然而,传统的边界框损失即Smooth L1损失并没有考虑到groundtruth模糊的情形。一般来说,分类的分数越高,其边界框的回归应该更加准确,然而,这种情况不是总是发生,如Figure2所示:
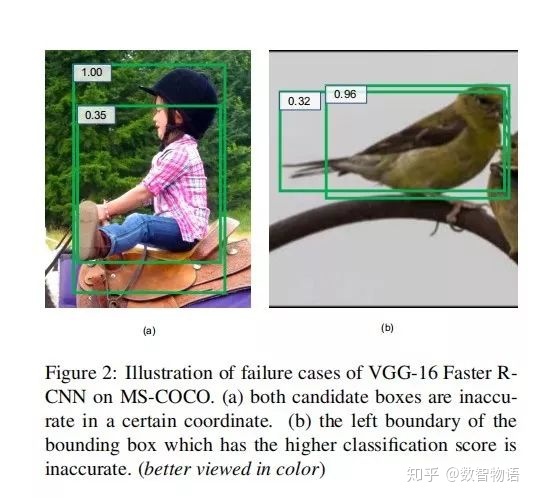
(a)两个候选框都是不准确的。大的过大,小的过小。
(b)具有较高分类分数的边界框的左边界是不准确。(颜色更容易观察)
02相关工作
双阶段检测器单阶段检测虽然高效,但是state-of-art仍然基于双阶段检测。双阶段首先会生成proposal,进而产生大量重叠的边界框,标准的NMS会将类别分数较低,但是较为准确的框给剔除掉。本文的var voting尝试利用相邻的边界框来进行更好的定位。
目标检测损失函数Uni
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 1756
1756











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









