







这次比赛我们使用的FDC2214。
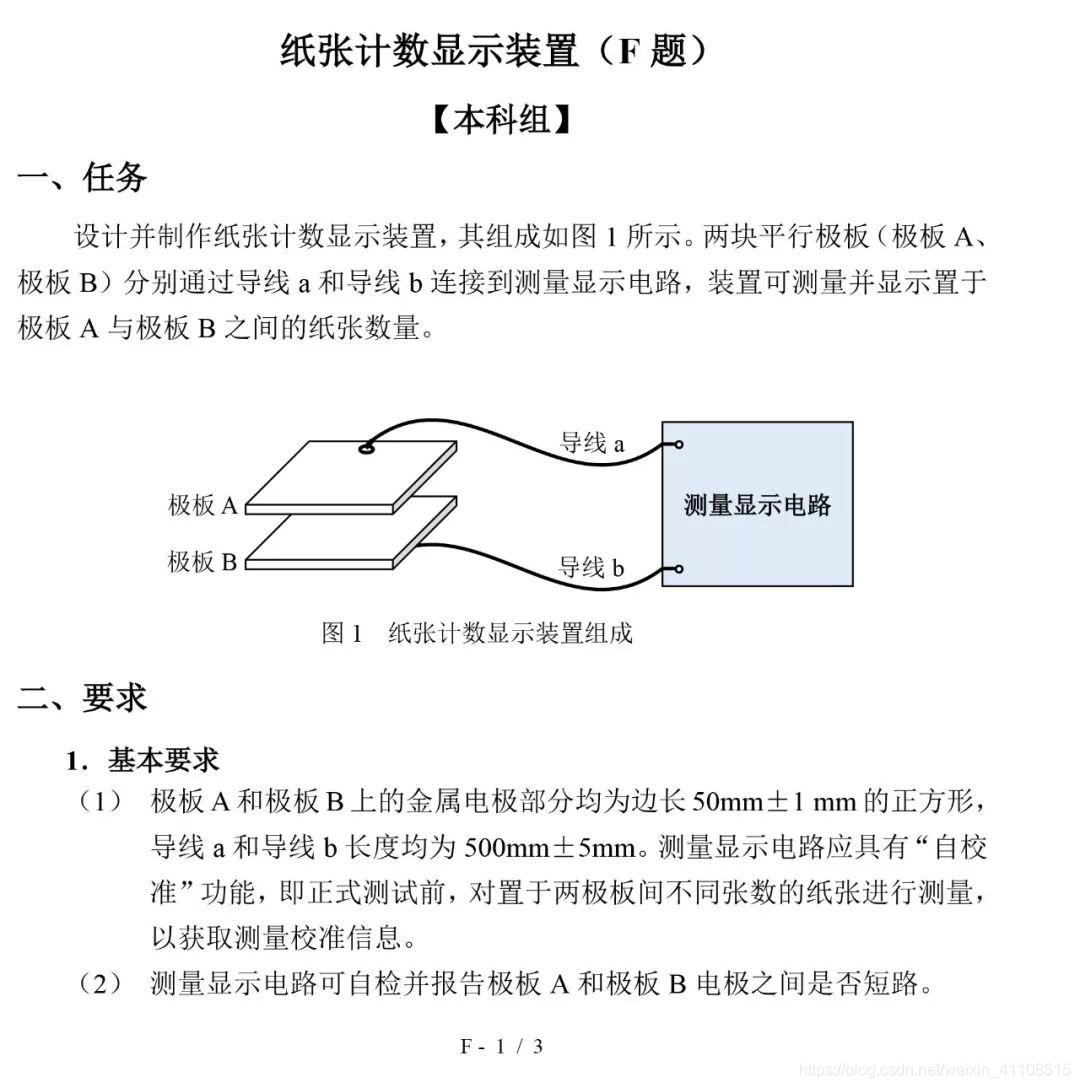
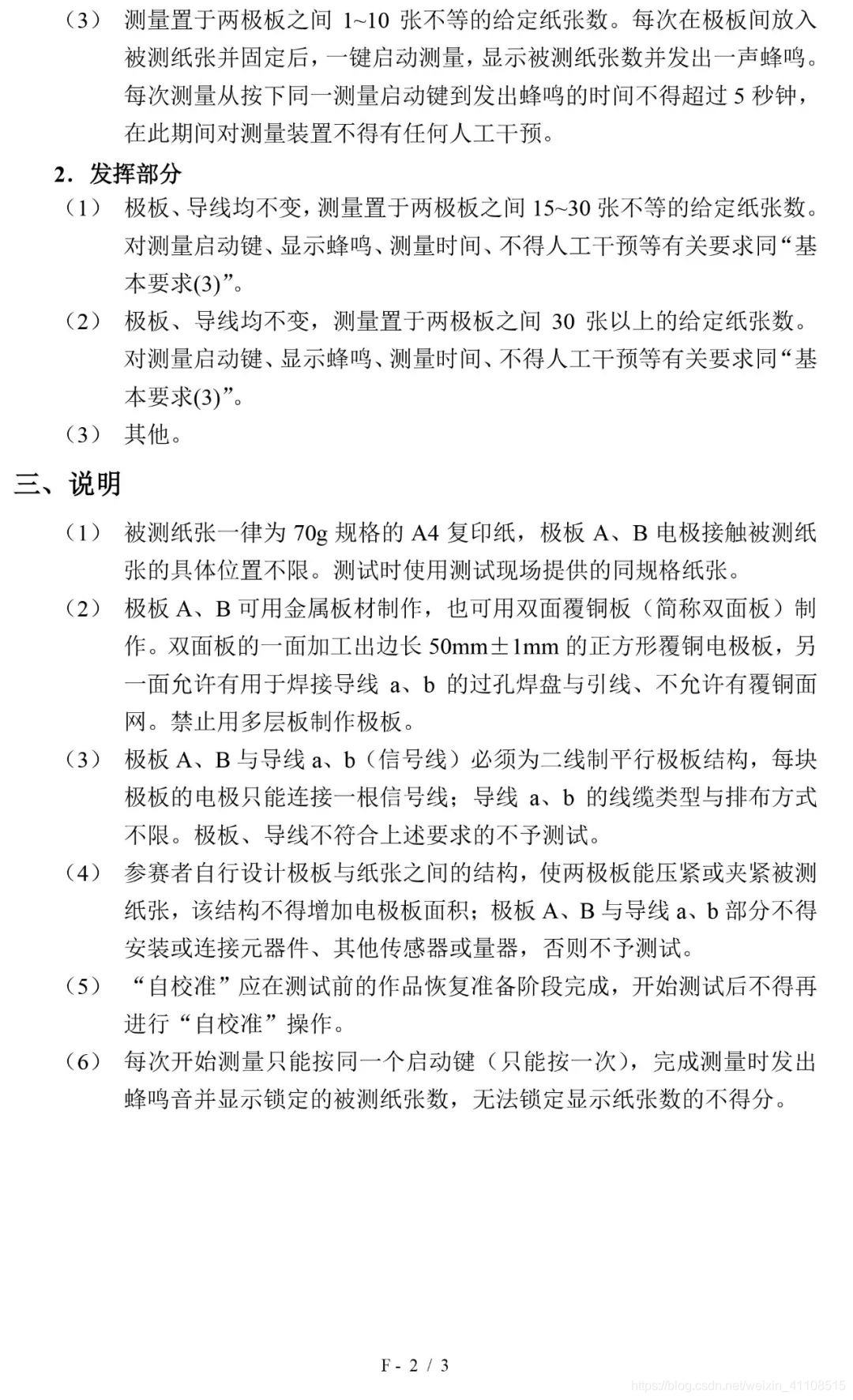
简单的说一下吧,我们做这个比赛时写的方法,自检计数,比较最近数值。至于比赛名次省一,多了不想说了。》》》》》》。。。。。。。。。。。
main函数
#include "systemInit.h"
#include <uart.h>
#include "SoftI2C.H"
#include "SoftI2C_CFG.H"
#include "uartGetPut.h"
#include "FDC2214.h"
#include <stdio.h>
#include "lcd_driver.h"
#include "ZLG7290.h"
#include "buzzer.h"
#define PART_LM3S1138
#include <pin_map.h>
#include <stdlib.h>
#include<time.h>
#include "systemInit.h"
#include <timer.h>
#include "KEY.H"
// 将较长的标识符定义成较短的形式
#define SysCtlPeriEnable SysCtlPeripheralEnable
#define SysCtlPeriDisable SysCtlPeripheralDisable
#define GPIOPinTypeIn GPIOPinTypeGPIOInput
#define GPIOPinTypeOut GPIOPinTypeGPIOOutput
#define Key_1 GPIOPinRead(GPIO_PORTE_BASE , GPIO_PIN_0)
#define Key_2 GPIOPinRead(GPIO_PORTE_BASE , GPIO_PIN_1)
#define Key_3 GPIOPinRead(GPIO_PORTD_BASE , GPIO_PIN_3)
// 定义KEY
#define KEY_PERIPH SYSCTL_PERIPH_GPIOG
#define KEY_PORT GPIO_PORTG_BASE
#define KEY_PIN GPIO_PIN_5
int T1 , T2 , T3 , T4 ;
unsigned long k;
int Real_Num , Step_All ;
char a[10];
int Data_Mar[100][2] ;
int Ans_Data ;
double comPare[500] = {0} ;
void Data_N ( int Array[][2] , int m );
void Time_Init( void ) {
SysCtlPeriEnable(SYSCTL_PERIPH_GPIOD); // 使能iic所在的GPIO端口
GPIOPinTypeIn(GPIO_PORTD_BASE, GPIO_PIN_0); // 设置iic所在管脚为输入
GPIOPinTypeIn(GPIO_PORTD_BASE, GPIO_PIN_3); // 设置iic所在管脚为输入
SysCtlPeriEnable(SYSCTL_PERIPH_GPIOE); // 使能iic所在的GPIO端口
GPIOPinTypeIn(GPIO_PORTE_BASE, GPIO_PIN_0); // 设置iic所在管脚为输入
GPIOPinTypeIn(GPIO_PORTE_BASE, GPIO_PIN_1); // 设置iic所在管脚为输入
GPIOPinTypeOut(GPIO_PORTE_BASE, GPIO_PIN_2);
GPIOPinTypeOut(GPIO_PORTE_BASE, GPIO_PIN_3);
GPIOPinWrite( GPIO_PORTE_BASE, GPIO_PIN_2, 0x01<<2);
GPIOPinWrite( GPIO_PORTE_BASE, GPIO_PIN_3, 0x01<<2);
SysCtlPeriEnable(SYSCTL_PERIPH_TIMER0); // 使能Timer模块
TimerConfigure(TIMER0_BASE, TIMER_CFG_16_BIT_PAIR | // 配置Timer为16位周期定时器
TIMER_CFG_B_PERIODIC);
TimerPrescaleSet(TIMER0_BASE, TIMER_B, 99); // 预先进行100分频
TimerLoadSet(TIMER0_BASE, TIMER_B, 30000); // 设置Timer初值,定时500ms
TimerIntEnable(TIMER0_BASE, TIMER_TIMB_TIMEOUT); // 使能Timer超时中断
IntEnable(INT_TIMER0B); // 使能Timer中断
IntMasterEnable(); // 使能处理器中断
TimerEnable(TIMER0_BASE, TIMER_B); // 使能Timer计数
}
// 主函数(程序入口)
int main(void)
{
jtagWait(); // 防止JTAG失效,重要!
clockInit(); // 时钟初始化:晶振,6MHz
I2C_Init();
uartInit();
init_lcd();
Time_Init();
buzzerInit();// 蜂鸣器初始化
if(FDC2214_Init()==1){
uartPuts("初始化成功\r\n");
disp_line(0," 初始化成功! ");
SysCtlDelay(100 * (TheSysClock / 3000));
GUI_ClearSCR(0);
}
else{
uartPuts("初始化失败请检查系统后重启");
disp_line(0," 初始化失败! ");
disp_line(1,"请检查系统后重启");
while(1);
}
while(1){
if ( ( T1 == 0 ) && ( T2 == 0 ) && ( T3 == 0 ) && ( T4 == 0 ) ){
T3 = 1 ;
GUI_ClearSCR(0);
disp_line(0,"实现自检功能: 1 ");
disp_line(0,"实现自检功能: 1 ");
disp_line(1,"测试纸张功能: 2 ");
disp_line(2,"纸张类型测量: 3 ");
disp_line(3," ");
}
if ( T1 == 1 ){
T3 = 0 ;
TimerDisable(TIMER0_BASE, TIMER_B); // 使能Timer计数
int N1 = 0 , N2 = 0 ,N3 = 0 ;
int Step = 0 , i ;
while( T1 == 1 ) {
FDC2214_GetChannelData(FDC2214_Channel_0, &k);
Real_Num = ( int )( k / 1000.0 );
sprintf(a,"电容量:%d\r\n", Real_Num);
uartPuts(a);
sprintf(a,"电容量:%d", Real_Num);
disp_line(3,a);
T1 = 1 ;
if ( Real_Num > 50000 ){
GPIOPinWrite( GPIO_PORTE_BASE, GPIO_PIN_2, 0x00 );buzzerSound(2000); // 蜂鸣器发出2000Hz声音
SysCtlDelay(800 * (TheSysClock / 3000)); // 延时约800ms
}else {
GPIOPinWrite( GPIO_PORTE_BASE, GPIO_PIN_2, 0x01<<2 );
buzzerQuiet(); // 蜂鸣器静音
}
if ( N1 == 0 ){
N1 = 1 ;
disp_line(0,"确认纸的值: ");
disp_line(1,"按键2 开始记录1 ");
disp_line(2," ");
disp_line(3," ");
}
if ( ( Key_2 == 0 ) && ( N2 == 0 ) ){
N2 = 1 ;
Data_Mar[Step][0] = Step ;
Data_Mar[Step][1] = Real_Num ;
sprintf(a,"%d %d ", Data_Mar[Step][0] ,Data_Mar[Step][1] );
uartPuts(a);
sprintf(a,"第%d 页记录成功 ", Step+1);
if( Step >= 10 )
sprintf(a,"第%d页记录成功 ", Step+1);
uartPuts(a);
disp_line(1,a);
Step ++ ;
Data_Mar[Step][0] = Step ;
Step ++ ;
sprintf(a,"第%d 页开始记录 ", Step+1);
if( Step >= 10 )
sprintf(a,"第%d页开始记录 ", Step+1);
uartPuts(a);
disp_line(2,a);
Step_All = Step ;
N3 = 1 ;
T1 = 1 ;
}
if( Key_2 != 0 ){
N2 = 0 ;
}
if( ( Key_1 == 0 ) && ( N3 == 1 ) ){
disp_line(1,"自检成功 ");
disp_line(2,"一秒后回主页面 ");
disp_line(3," ");
for (i = 0 ; i < Step_All ; i ++ ){
sprintf(a,"%d %d \r\n", Data_Mar[i][0] ,Data_Mar[i][1] );
uartPuts(a);
}
Data_N ( Data_Mar , Step_All );
for ( i = 0 ; i < Step_All ; i ++ ){
sprintf(a,"%d %lf \r\n", i , comPare[i] );
uartPuts(a);
}
T1 = 0 ;
T2 = 0 ;
T3 = 0 ;
T4 = 0 ;
N1 = 0 ;
N3 = 0 ;
}
}
TimerEnable(TIMER0_BASE, TIMER_B); // 使能Timer计数
}else if ( T2 == 1 ){
int N1 = 0 , N2 = 0 ,Err_1 , Err_2 , Ans , Error , N4 = 0 ;
T3 = 0 ;
TimerDisable(TIMER0_BASE, TIMER_B); // 使能Timer计数
while( T2 == 1 ) {
if ( N1 == 0 ){
N1 = 1 ;
sprintf(a,"最大纸的页数:%d", Step_All );
disp_line(0,a);
disp_line(1,"按键1 开始检测 ");
disp_line(2," ");
disp_line(3," ");
}
if ( N2 == 0 ){
while( N2 == 0 ){
FDC2214_GetChannelData(FDC2214_Channel_0, &k);
Real_Num = ( int )( k / 1000.0 );
sprintf(a,"电容量:%d\r\n", Real_Num);
uartPuts(a);
N2 = 0 ;
if( Key_1 == 0 ){
N2 = 1 ;
}
}
for ( Error = 0 ; Error < 2 * Step_All ; Error ++ ){
if ( comPare[Error] >= Real_Num ){
break ;
}
}
Err_1 = comPare[Error] - Real_Num ;
Err_2 = Real_Num - comPare[Error - 1 ];
Ans = ( ( Err_1 >= Err_2 ? ( Error - 1 ) : Error ) );
sprintf(a,"页数为: %d张 ", ( Ans + 1 ));
uartPuts(a);
disp_line(1,a);
disp_line(3,"按键2 退出 ");
while(1){
if ( Key_2 == 0 ){
N4 = 1 ;
}
if ( ( Key_2 != 0) && ( N4 == 1 ) ){
T1 = 0 ;
T2 = 0 ;
T3 = 0 ;
T4 = 0 ;
break ;
}
}
}
}
TimerEnable(TIMER0_BASE, TIMER_B); // 使能Timer计数
}else if( T4 == 1 ){
int K1 = 0 , K2 = 0 , K3 = 0;
T3 = 0 ;
TimerDisable(TIMER0_BASE, TIMER_B); // 使能Timer计数
while( T4 == 1){
if( K1 == 0 ){
K1 = 1;
disp_line(0,"纸张类型测量: ");
disp_line(0,"纸张类型测量: ");
disp_line(1,"按键1 开始检测 ");
disp_line(2," ");
disp_line(3," ");
}
if( K2 == 0 ){
while( K2 == 0 ){
FDC2214_GetChannelData(FDC2214_Channel_0, &k);
Real_Num = ( int )( k / 1000.0 );
sprintf(a,"电容量:%d\r\n", Real_Num);
uartPuts(a);
disp_line(3,a);
K2 = 0 ;
if( Key_1 == 0 ){
K2 = 1 ;
}
}
//卡纸:8441 信纸:7389 作业纸:7706
/* if(){
disp_line(1," 卡纸 ");
disp_line(3,"按键2 退出 ");
}
else if(){
disp_line(1," 信纸 ");
disp_line(3,"按键2 退出 ");
}
else if(){
disp_line(1," 作业纸 ");
disp_line(3,"按键2 退出 ");
}*/
while(1){
if ( Key_2 == 0 ){
K3 = 1 ;
}
if ( ( Key_2 != 0) && ( K3 == 1 ) ){
T1 = 0 ;
T2 = 0 ;
T3 = 0 ;
T4 = 0 ;
break ;
}
}
}
}
TimerEnable(TIMER0_BASE, TIMER_B); // 使能Timer计数
}
}
}
void Data_N ( int Array[][2] , int m ){
int i = 0 , j = 0 , Num_B = 0 , Num_A = 0 ;
for( i = 0 ; i <= m ; i ++ ){
Num_B = Array[i][0] ;
Num_A = Array[i][1] ;
comPare[Num_B] = Num_A ;
}
if ( comPare[0] == 0 ){
comPare[0] = 1 ;
}
for ( j = 1 ; j < m ; j ++ ){
double Num_Left = 0 , Num_right = 0;
int k1 = 0 , k2 = 0 ;
if ( comPare[j] == 0 ){
for ( k1 = j - 1 ; k1 >= 0 ; k1 -- ){
if( comPare[k1] != 0 ){
Num_Left = comPare[k1];
break;
}
}
if ( Num_Left == 0 ){
Num_Left = 1 ;
}
for ( k2 = j + 1 ; k2 < 2*m ; k2 ++ ){
if( comPare[k2] != 0 ){
Num_right = comPare[k2] ;
break ;
}
}
if ( Num_right == 0 ){
comPare[j] = comPare[j - 1 ] + 1 ;
}else{
comPare[j] = ( Num_Left + Num_right ) / 2.0 ;
}
}
}
}
// 定时器的中断服务函数
void Timer0B_ISR(void)
{
unsigned long ulStatus;
ulStatus = TimerIntStatus(TIMER0_BASE, true); // 读取中断状态
TimerIntClear(TIMER0_BASE, ulStatus); // 清除中断状态,重要!
if (ulStatus & TIMER_TIMB_TIMEOUT) // 如果是Timer超时中断
{
if ( Key_1 == 0 ){
T1 = 1 ;
T2 = 0 ;
T4 = 0 ;
}
else if ( Key_2 == 0 ){
T1 = 0 ;
T2 = 1 ;
T4 = 0 ;
}
else if ( Key_3 == 0 ){
T1 = 0 ;
T2 = 0 ;
T4 = 1 ;
}
}
}














 1362
1362











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









