




 本文介绍如何使用MATLAB的Driving Scenario Designer构建驾驶场景,包括添加道路、车道、车辆和行人,并配置传感器如相机和雷达。通过运行方案和导出检测数据,可用于测试控制器或传感器融合算法。
本文介绍如何使用MATLAB的Driving Scenario Designer构建驾驶场景,包括添加道路、车道、车辆和行人,并配置传感器如相机和雷达。通过运行方案和导出检测数据,可用于测试控制器或传感器融合算法。
建立驾驶场景并生成综合检测
本示例说明如何使用**Driving Scenario Designer**应用程序构建驾驶场景并从中生成视觉和雷达传感器检测结果。您可以使用这些检测来测试控制器或传感器融合算法。
本示例涵盖了创建方案和生成综合检测的整个工作流程。或者,您可以从预建方案中生成检测结果。有关更多详细信息,请参见“ 驾驶方案设计器”中的“预建驾驶方案”。
创建新的驾驶场景
要打开应用程序,在MATLAB ®命令提示符下,输入drivingScenarioDesigner。
加一条路
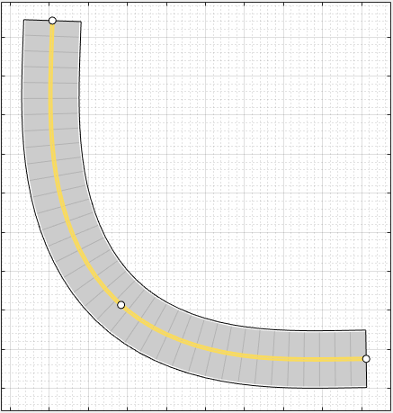
在方案画布上添加一条弯曲的道路。在应用工具栏上,点击添加道路。然后单击画布的一个角,将道路扩展到对角,然后双击以创建道路。
要绘制道路曲线,请添加道路中心以使其弯曲。右键单击道路中间,然后选择添加道路中心。然后将添加的道路中心拖动到画布的空角之一。
要进一步调整道路,可以单击并拖动任何道路中心。要创建更复杂的曲线,请添加更多的道路中心。
添加车道
默认情况下,道路为单车道且没有车道标记。为了使场景更加逼真,请将道路转换为两车道的高速公路。在左窗格中,在 道路选项卡,展开车道部分。设置通道的数量,以[1 1]和 车道宽度,以3.6米,这是一个典型的高速公路车道宽度。
道路两边的白色实线车道标记指示路肩。中心的黄色双实线车道表示该道路为双向。要检查或修改这些通道,请从“ **标记”**列表中选择其中一个通道并修改通道参数。
添加车辆
默认情况下,您添加到方案中的第一辆车是ego vehicle,它是驾驶方案中的主要汽车。自我车辆包含传感器,用于检测场景中的车道标记,行人或其他车辆。添加自我车辆,然后添加第二辆汽车以供自我车辆检测。
添加自我车辆
要添加自我车辆,请右键单击道路的一端,然后选择添加车辆。要指定汽车的轨迹,请右键单击汽车,选择添加航点,然后为汽车通过而添加沿道路的航点。添加沿道路的最后一个航点后,按 Enter。赛车会自动向第一个航点的方向旋转。为了在轨迹上获得更高的精度,您可以调整航路点。您也可以右键单击路径以添加新的航路点。
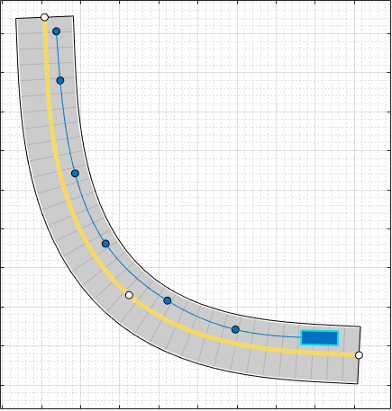
现在调整汽车的速度。在左窗格的“ **角色”**选项卡上,将“ **恒定速度”**设置为 15m / s。要更好地控制汽车的速度,请清除“ **恒定速度”**复选框,然后在“ **航点”**表中设置航点之间的速度。
添加第二辆车
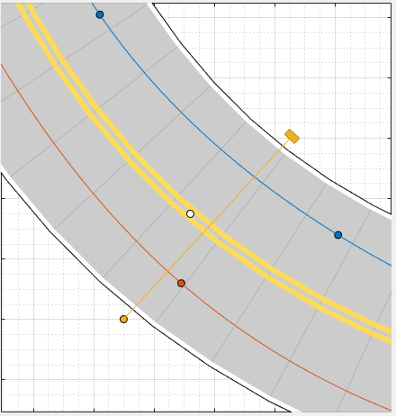
添加车辆以供自我车辆检测。在应用程序工具栏上,点击 添加演员,然后选择汽车。添加第二个带有路点的汽车,在自我车辆对面的车道上行驶,并在道路的另一端。保持汽车的速度和其他设置不变。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-XHbAtEb2-1600270649674)(https://upload-images.jianshu.io/upload_images/15863171-7c937f028b217891.png?imageMogr2/auto-orient/strip%7CimageView2/2/w/1240)]
添加行人
将场景添加到行人过马路。在道路中间放大(Ctrl + Plus),右键单击道路的一侧,然后单击添加行人。然后,要设置行人的路径,请在道路的另一侧添加一个路标。
默认情况下,行人的颜色几乎与车道标记的颜色匹配。要使行人更加突出,请从“ **角色”**选项卡中,单击行人的相应色块以修改其颜色。
要测试汽车和行人的速度,请运行仿真。通过从“ **角色”**选项卡的左窗格中选择角色,根据需要调整角色速度或其他属性 。
添加传感器
将前置雷达和视觉(摄像头)传感器添加到自我车辆中。使用这些传感器生成对行人,车道边界和其他车辆的检测。
新增相机
在应用工具栏上,点击添加相机。传感器画布显示放置传感器的标准位置。单击最前面的预定义传感器位置,以将摄像头传感器添加到自我车辆的前保险杠。为了更精确地放置传感器,可以禁用捕捉选项。在传感器画布的左下角,单击“配置传感器画布”按钮 。
。
默认情况下,摄像机仅检测演员,而不检测车道。要启用车道检测,请在左窗格的“ **传感器”**选项卡上,展开“ **检测参数”**部分,并将“ **检测类型”**设置为Objects & Lanes。然后展开“ **车道设置”**部分,并根据需要更新设置。
添加雷达
将雷达传感器卡入左前轮。右键单击车轮的预定义传感器位置,然后选择添加雷达。默认情况下,添加到车轮的传感器是短距离的。
将雷达传感器倾斜到汽车的前部。将光标移到覆盖区域上,然后单击并拖动角度标记。
在右前轮上增加一个相同的雷达传感器。右键单击左前轮上的传感器,然后单击复制。然后右键单击右前轮的预定义传感器位置,然后单击 粘贴。复制的传感器的方向反映了对向轮上传感器的方向。
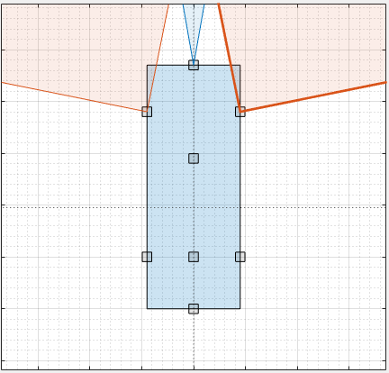
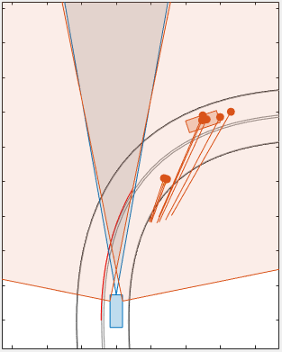
摄像头和雷达传感器现在可以覆盖自我车辆前部的重叠区域。
生成综合检测
运行方案
要从传感器生成检测,请单击运行。在方案运行时,“以自我为中心的视图”会从“自我”工具的角度显示方案。的鸟瞰绘图 显示检测。
要关闭某些类型的检测,请在鸟瞰图的左下角,单击“配置鸟瞰图”按钮  。
。
默认情况下,该场景在第一个参与者停止时结束。要在特定时间段内运行该方案,请在应用程序工具栏上单击**“设置”**并更改停止条件。
导出传感器检测
-
要将检测结果导出到MATLAB工作区,请在应用工具栏上,选择导出 > 导出传感器数据。命名工作空间变量,然后单击“ 确定”。该应用程序将传感器数据保存为包含每个时间步骤的演员姿势,物体检测和车道检测的结构。
-
要导出生成方案及其检测结果的MATLAB函数,请选择Export > Export MATLAB Function。此函数将传感器检测结果作为结构返回,将方案作为
drivingScenario对象返回,并且将传感器模型返回为visionDetectionGenerator和radarDetectionGenerator系统对象。通过修改此功能,可以创建原始方案的变体。有关此过程的示例,请参见以 编程方式创建行驶方案变体。
保存方案
生成检测结果后,单击“ **保存”**以保存方案文件。此外,您可以将传感器模型另存为单独的文件。您还可以将道路和参与者模型一起保存为单独的方案文件。
您可以从应用程序中重新打开此方案文件。或者,在MATLAB命令提示符下,您可以使用此语法。
DrivingScenarioDesigner(scenarioFileName)
您也可以使用导出的drivingScenario对象重新打开方案。在MATLAB命令提示符下,使用以下语法,其中scenario是导出对象的名称。
DrivingScenarioDesigner(场景)
要重新打开传感器,请使用以下语法,其中sensors是radarDetectionGenerator对象,visionDetectionGenerator对象或此类对象的单元格数组。
DrivingScenarioDesigner(场景,传感器)
如果您正在开发在Simulink驱动算法®,您可以使用场景读卡器 块从场景文件或读取道路和演员drivingScenario对象到模型中。该块不直接读取传感器数据。要将应用程序中创建的传感器添加到Simulink模型,可以通过选择导出 > 导出Simulink模型来生成一个包含场景和传感器的模型。在此模型中,方案读取器模块读取方案, 雷达检测生成器和视觉检测生成器模块对传感器进行建模。


















 661
661

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











