






在接触惯性测量单元(IMU)中,通常会涉及到很多专业名词,其中包括以下物理量、工艺方法、数学表达等,下文中会涉及到以下名词的解释,以下解释仅作为个人理解,不作为权威名词解释,如果错误或片面,请不吝啬指正。
陀螺仪(gyroscope)
加速度计(accelerometer)
磁力计(magnetometer)
MEMS (Micro Electro Mechanical Systems微机电系统)
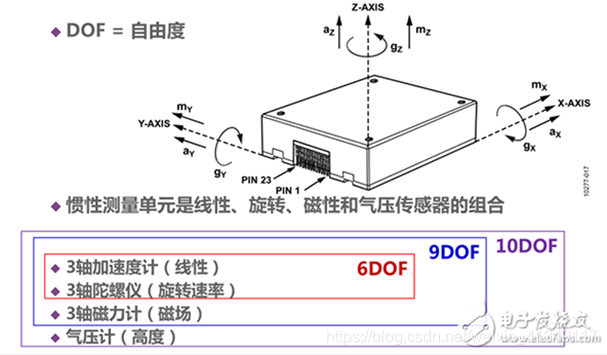
IMU (Inertial Measurement Unit 惯性测量单元)
AHRS (Attitude and Heading Reference System 航姿参考系统)
6轴IMU (6DOF)
9轴IMU (9DOF)
欧拉角 (Euler Angle)
四元数 (Quaternions)
陀螺仪(gyroscope)

在一定的初始条件和一定的外在力矩作用下,陀螺会在不停自转的同时,环绕着另一个固定的转轴不停地旋转,这就是陀螺的旋进(precession),又称为回转效应(gyroscopic effect)。
利用陀螺的力学性质所制成的各种功能的陀螺装置称为陀螺仪(gyroscope),用于测量角速度。
加速度计(accelerometer)

加速度计,是测量运载体线加速度的仪表。
磁力计(magnetometer)

也叫地磁、磁感器,可用于测试磁场强度和方向,定位设备的方位,磁力计的原理跟指南针原理类似,可以测量出当前设备与东南西北四个方向上的夹角。
MEMS (Micro Electro Mechanical Systems微机电系统)
也叫做微电子机械系统、微系统、微机械等,指尺寸在几毫米乃至更小的高科技装置。
常见的产品包括MEMS加速度计、 MEMS陀螺仪、MEMS压力传感器、MEMS湿度传感器、MEMS气体传感器等等以及它们的集成产品。
IMU (Inertial Measurement Unit 惯性测量单元)
是测量物体三轴姿态角(或角速率)以及加速度的装置,一般情况,一个IMU包含了三个单轴的加速度计和三个单轴的陀螺仪,也可能包含磁力计
6轴IMU (6DOF)
9轴IMU (9DOF)
主要厂商: 博世(Bosch)、意法半导体(STMicroelectronics)
InvenSense、(TDK)
6DOF 代表型号:MPU6050,ICM20608
9DOF 代表型号:MPU9250,ICM20948,BNO055
AHRS (Attitude and Heading Reference System 航姿参考系统)
航姿参考系统包括基于MEMS的三轴陀螺仪,加速度计和磁强计。航姿参考系统与惯性测量单元IMU的区别在于,航姿参考系统(AHRS)包含了嵌入式的姿态数据解算单元与航向信息,惯性测量单元(IMU)仅仅提供传感器数据,并不具有提供准确可靠的姿态数据的功能。
欧拉角 (Euler Angle)

用来确定定点转动刚体位置的3个一组独立角参量,由章动角θ、旋进角(即进动角)ψ和自转角j组成,为欧拉首先提出而得名。

但是会造成万向锁(Gimbal Lock)的现象
四元数 (Quaternions)

四元数本质上是一种高阶复数,它能够很方便的刻画刚体绕任意轴的旋转。可以避免万向锁现象.














 6675
6675











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









