







前言:
Shi-Tomasi算法是Harris算法的改进,在Harris算法中,是根据协方差矩阵M的两个特征值的组合来判断是否角点。而在Shi-Tomasi算法中,是根据较小的特征值是否大于阈值来判断是否角点。 这个判断依据是:较小的特征值表示在该特征值方向上的方差较小,较小的方差如果都能够大于阈值,在这个方向上的变化满足是角点的判断要求。
OpenCV中的goodFeaturesToTrack函数可以计算Harris角点和Shi-Tomasi角点,但默认情况下计算的是Shi-Tomasi角点。那么为什么函数取名为goodFeaturesToTrack呢?这是因为在1994年,J.Shi和C.Tomasi在其论文“Good Features to Track”中,提出了一种对Harris角点检测算子的改进算法——Shi-Tomasi角点检测算子,因此,Opencv在命名goodFeaturesToTrack函数时,就直接利用了他们论文的名字。
一、函数API介绍
我们首先来看一下c++版本中goodFeaturesToTrack函数的声明:
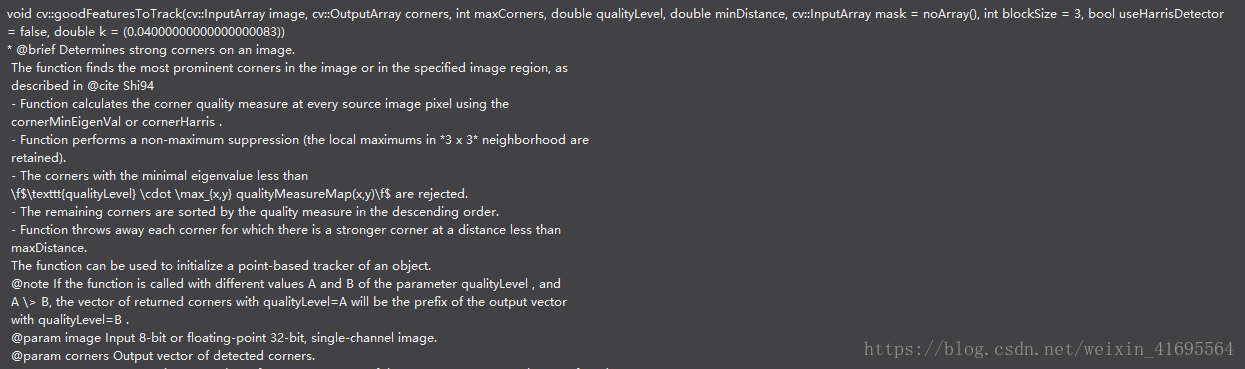
其参数解释如下:
image:输入图像,即8位或32位单通道灰度图像;
corners:位置点向量,保存的是检测到的角点的坐标;
maxCorners:表示返回的角点的最大数目,如果检测出来的角点数目大于该设置值,则返回响应值的最前 maxCorners个强角点;
qualityLevel:检测到的角点的质量等级,角点特征值小于qualityLevel*最大特征值的点将被舍弃;
minDistance:两个角点间最小间距,以像素为单位计算的欧几德里距离;
mask:指定检测区域,若检测整幅图像,mask置为空,即Mat();
blockSize:计算协方差矩阵时邻域的大小;
useHarrisDetector:询问是否使用Harris角点检测,若为false,则使用Shi-Tomasi算子;
k:留给Harris角点检测算子用的中间参数,一般取经验值0.04~0.06。第八个参数为false时,该参数不起作用;
二、代码演示
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
// 定义全局变量
int num_corners = 25;
int max_corners = 200;
const string output_title = "Shi-Tomasi检测";
void ShiTomasi_Demo(int, void*); // 回调函数声明
Mat src_img, gray_img;
//定义一个RNG类对象,便于后面使用rng.uniform(0, 255)来产生一个0-255之间
//的随机整数(下限值和上限值都是整数,则返回的随机数也是整数)
RNG rng;
// 主函数
int main()
{
src_img = imread("test11.png");
if (src_img.empty())
{
printf("could not load the image...\n");
return -1;
}
namedWindow("原图", CV_WINDOW_AUTOSIZE);
imshow("原图", src_img);
cvtColor(src_img, gray_img, COLOR_BGR2GRAY); //彩色图像转化为灰度图像
//namedWindow(output_title, CV_WINDOW_AUTOSIZE);
//createTrackbar("角点数目", output_title, &num_corners, max_corners, ShiTomasi_Demo); //创建TrackBar
//ShiTomasi_Demo(0, 0);
for (int i = 0; i < 20;++i)
cout<< rng.uniform(0,255)<<endl;
waitKey(0);
return 0;
}
// 回调函数实现
void ShiTomasi_Demo(int, void*)
{
if (num_corners < 5)
{
num_corners = 5;
}
vector<Point2f> corners; //即vector中的每一个元素都是Point2f类型的, OpenCV中有定义:typedef Point_<float> Point2f;
double qualityLevel = 0.01;
double minDistance = 10;
int blockSize = 3;
bool useHarris = false;
double k = 0.04;
Mat result_img = src_img.clone();
goodFeaturesToTrack(gray_img, corners, num_corners, qualityLevel, minDistance, Mat(), blockSize, useHarris, k);
printf("检测到角点的数目: %d\n", corners.size()); // Vector对象的size()方法返回其中的元素个数
for (auto t = 0; t < corners.size(); ++t) // 遍历检测到的每一个角点
{
circle(result_img, corners[t], 2, Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255)), 2, 8, 0);
}
imshow(output_title, result_img);
}
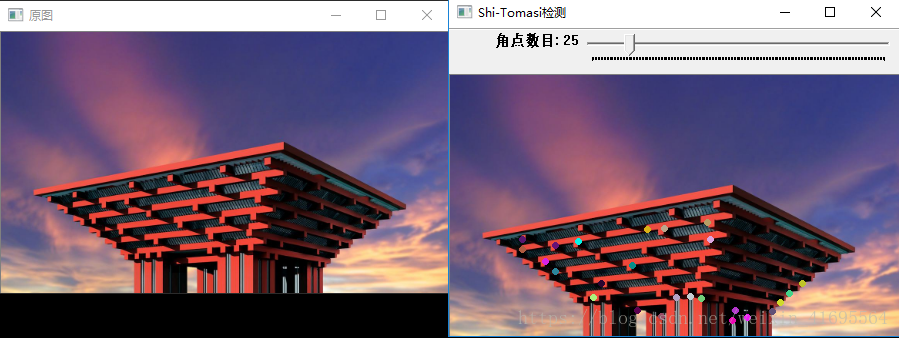
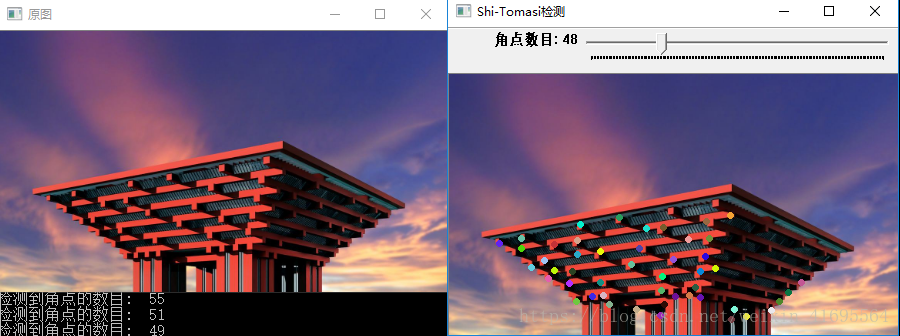
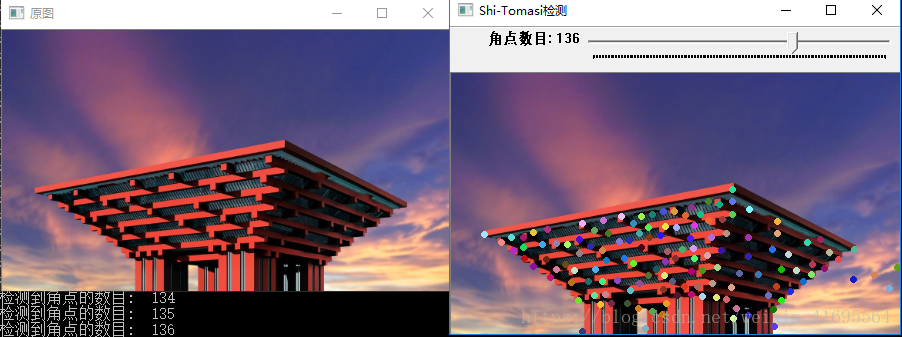
运行程序,结构如下:
三、随机数产生器
本文在构造随机数组成的scalar来表示颜色的时候,用到了C++的RNG类。它可以压缩一个64位的整数并可以得到scalar和array的随机数,其uniform函数可以返回指定范围的随机数,其函数声明如下:

这里介绍一个uniform的使用事项,就是比如利用它产生0~255的随机整数的问题(因为输入为int型参数,会调用uniform(int,int),因而产生int型随机数),演示代码如下:
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main()
{
//定义一个RNG类对象,便于后面使用rng.uniform(0, 255)来产生一个0-255之间
//的随机整数(下限值和上限值都是整数,则返回的随机数也是整数)
RNG rng; //定义一个RNG对象
for (int i = 0; i < 30; ++i)
{
cout << rng.uniform(0, 255) << endl; //循环打印30个随机值
}
system("PAUSE");
return 0;
}
运行程序,如下:
假如要产生0-255之间的浮点数呢?
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main()
{
//定义一个RNG类对象,便于后面使用rng.uniform(0, 255)来产生一个0-255之间
//的随机整数(下限值和上限值都是整数,则返回的随机数也是整数)
RNG rng;
for (int i = 0; i < 30; ++i)
{
cout << rng.uniform(float(0), float(255)) << endl; //循环打印30个随机浮点数值
}
system("PAUSE");
return 0;
}运行程序如下:
四、源码解析
摘自https://blog.csdn.net/xdfyoga1/article/details/44175637
goodFeaturesToTrack函数的定义在imgproc文件的featureselect.cpp中,下面给出了goodFeaturesToTrack函数的详细注释。
void cv::goodFeaturesToTrack( InputArray _image, OutputArray _corners,
int maxCorners, double qualityLevel, double minDistance,
InputArray _mask, int blockSize,
bool useHarrisDetector, double harrisK )
{
//如果需要对_image全图操作,则给_mask传入cv::Mat(),否则传入感兴趣区域
Mat image = _image.getMat(), mask = _mask.getMat();
CV_Assert( qualityLevel > 0 && minDistance >= 0 && maxCorners >= 0 ); //对参数有一些基本要求
CV_Assert( mask.empty() || (mask.type() == CV_8UC1 && mask.size() == image.size()) );
Mat eig, tmp; //eig存储每个像素协方差矩阵的最小特征值,tmp用来保存经膨胀后的eig
if( useHarrisDetector )
cornerHarris( image, eig, blockSize, 3, harrisK ); //blockSize是计算2*2协方差矩阵的窗口大小,sobel算子窗口为3,harrisK是计算Harris角点时需要的值
else
cornerMinEigenVal( image, eig, blockSize, 3 ); //计算每个像素对应的协方差矩阵的最小特征值,保存在eig中
double maxVal = 0;
minMaxLoc( eig, 0, &maxVal, 0, 0, mask ); //maxVal保存了eig的最大值
threshold( eig, eig, maxVal*qualityLevel, 0, THRESH_TOZERO ); //阈值设置为maxVal乘以qualityLevel,大于此阈值的保持不变,小于此阈值的都设为0
//默认用3*3的核膨胀,膨胀之后,除了局部最大值点和原来相同,其它非局部最大值点被
//3*3邻域内的最大值点取代,如不理解,可看一下灰度图像的膨胀原理
dilate( eig, tmp, Mat()); //tmp中保存了膨胀之后的eig
Size imgsize = image.size();
vector<const float*> tmpCorners; //存放粗选出的角点地址
// collect list of pointers to features - put them into temporary image
for( int y = 1; y < imgsize.height - 1; y++ )
{
const float* eig_data = (const float*)eig.ptr(y); //获得eig第y行的首地址
const float* tmp_data = (const float*)tmp.ptr(y); //获得tmp第y行的首地址
const uchar* mask_data = mask.data ? mask.ptr(y) : 0;
for( int x = 1; x < imgsize.width - 1; x++ )
{
float val = eig_data[x];
if( val != 0 && val == tmp_data[x] && (!mask_data || mask_data[x]) ) //val == tmp_data[x]说明这是局部极大值
tmpCorners.push_back(eig_data + x); //保存其位置
}
}
//-----------此分割线以上是根据特征值粗选出的角点,我们称之为弱角点----------//
//-----------此分割线以下还要根据minDistance进一步筛选角点,仍然能存活下来的我们称之为强角点----------//
sort( tmpCorners, greaterThanPtr<float>() ); //按特征值降序排列,注意这一步很重要,后面的很多编程思路都是建立在这个降序排列的基础上
vector<Point2f> corners;
size_t i, j, total = tmpCorners.size(), ncorners = 0;
//下面的程序有点稍微难理解,需要自己仔细想想
if(minDistance >= 1)
{
// Partition the image into larger grids
int w = image.cols;
int h = image.rows;
const int cell_size = cvRound(minDistance); //向最近的整数取整
//这里根据cell_size构建了一个矩形窗口grid(虽然下面的grid定义的是vector<vector>,而并不是我们这里说的矩形窗口,但为了便于理解,还是将grid想象成一个grid_width * grid_height的矩形窗口比较好),除以cell_size说明grid窗口里相差一个像素相当于_image里相差minDistance个像素,至于为什么加上cell_size - 1后面会讲
const int grid_width = (w + cell_size - 1) / cell_size;
const int grid_height = (h + cell_size - 1) / cell_size;
std::vector<std::vector<Point2f> > grid(grid_width*grid_height); //vector里面是vector,grid用来保存获得的强角点坐标
minDistance *= minDistance; //平方,方面后面计算,省的开根号
for( i = 0; i < total; i++ ) // 刚刚粗选的弱角点,都要到这里来接收新一轮的考验
{
int ofs = (int)((const uchar*)tmpCorners[i] - eig.data); //tmpCorners中保存了角点的地址,eig.data返回eig内存块的首地址
int y = (int)(ofs / eig.step); //角点在原图像中的行
int x = (int)((ofs - y*eig.step)/sizeof(float)); //在原图像中的列
bool good = true; //先认为当前角点能接收考验,即能被保留下来
int x_cell = x / cell_size; //x_cell,y_cell是角点(y,x)在grid中的对应坐标
int y_cell = y / cell_size;
int x1 = x_cell - 1; // (y_cell,x_cell)的4邻域像素
int y1 = y_cell - 1; //现在知道为什么前面grid_width定义时要加上cell_size - 1了吧,这是为了使得(y,x)在grid中的4邻域像素都存在,也就是说(y_cell,x_cell)不会成为边界像素
int x2 = x_cell + 1;
int y2 = y_cell + 1;
// boundary check,再次确认x1,y1,x2或y2不会超出grid边界
x1 = std::max(0, x1); //比较0和x1的大小
y1 = std::max(0, y1);
x2 = std::min(grid_width-1, x2);
y2 = std::min(grid_height-1, y2);
//记住grid中相差一个像素,相当于_image中相差了minDistance个像素
for( int yy = y1; yy <= y2; yy++ ) // 行
{
for( int xx = x1; xx <= x2; xx++ ) //列
{
vector <Point2f> &m = grid[yy*grid_width + xx]; //引用
if( m.size() ) //如果(y_cell,x_cell)的4邻域像素,也就是(y,x)的minDistance邻域像素中已有被保留的强角点
{
for(j = 0; j < m.size(); j++) //当前角点周围的强角点都拉出来跟当前角点比一比
{
float dx = x - m[j].x;
float dy = y - m[j].y;
//注意如果(y,x)的minDistance邻域像素中已有被保留的强角点,则说明该强角点是在(y,x)之前就被测试过的,又因为tmpCorners中已按照特征值降序排列(特征值越大说明角点越好),这说明先测试的一定是更好的角点,也就是已保存的强角点一定好于当前角点,所以这里只要比较距离,如果距离满足条件,可以立马扔掉当前测试的角点
if( dx*dx + dy*dy < minDistance )
{
good = false;
goto break_out;
}
}
}
} // 列
} //行
break_out:
if(good)
{
// printf("%d: %d %d -> %d %d, %d, %d -- %d %d %d %d, %d %d, c=%d\n",
// i,x, y, x_cell, y_cell, (int)minDistance, cell_size,x1,y1,x2,y2, grid_width,grid_height,c);
grid[y_cell*grid_width + x_cell].push_back(Point2f((float)x, (float)y));
corners.push_back(Point2f((float)x, (float)y));
++ncorners;
if( maxCorners > 0 && (int)ncorners == maxCorners ) //由于前面已按降序排列,当ncorners超过maxCorners的时候跳出循环直接忽略tmpCorners中剩下的角点,反正剩下的角点越来越弱
break;
}
}
}
else //除了像素本身,没有哪个邻域像素能与当前像素满足minDistance < 1,因此直接保存粗选的角点
{
for( i = 0; i < total; i++ )
{
int ofs = (int)((const uchar*)tmpCorners[i] - eig.data);
int y = (int)(ofs / eig.step); //粗选的角点在原图像中的行
int x = (int)((ofs - y*eig.step)/sizeof(float)); //在图像中的列
corners.push_back(Point2f((float)x, (float)y));
++ncorners;
if( maxCorners > 0 && (int)ncorners == maxCorners )
break;
}
}
Mat(corners).convertTo(_corners, _corners.fixedType() ? _corners.type() : CV_32F);
/*
for( i = 0; i < total; i++ )
{
int ofs = (int)((const uchar*)tmpCorners[i] - eig.data);
int y = (int)(ofs / eig.step);
int x = (int)((ofs - y*eig.step)/sizeof(float));
if( minDistance > 0 )
{
for( j = 0; j < ncorners; j++ )
{
float dx = x - corners[j].x;
float dy = y - corners[j].y;
if( dx*dx + dy*dy < minDistance )
break;
}
if( j < ncorners )
continue;
}
corners.push_back(Point2f((float)x, (float)y));
++ncorners;
if( maxCorners > 0 && (int)ncorners == maxCorners )
break;
}
*/
} 













 329
329











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









