因为有需求,需要对UUV的姿态进行有效控制,所以需要用到ros下的工具。
一、Topic数据发送调试
publish data
rosrun rqt_publisher rqt_publisher
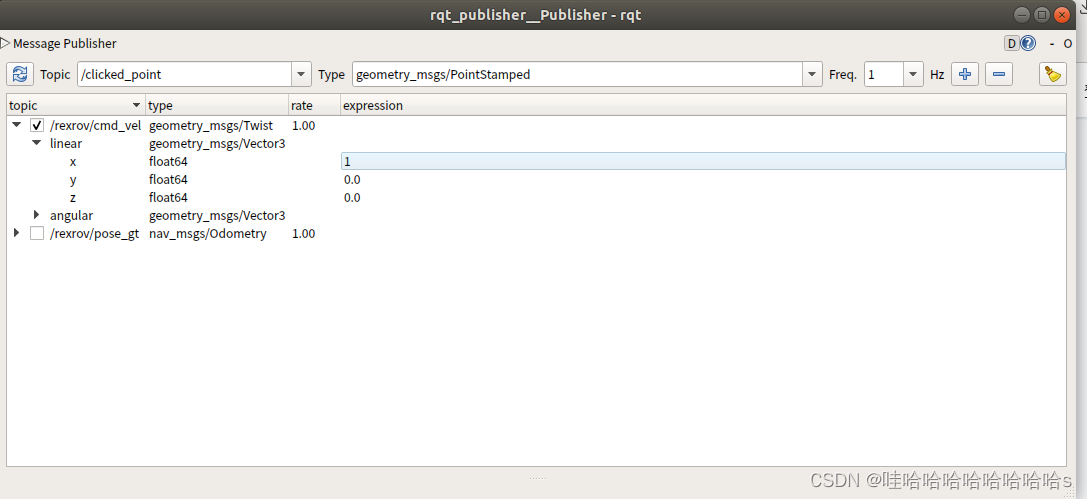
监听topic
rosrun rqt_topic rqt_topic
二、绘图工具plotjuggler
个人认为这个工具比rqt_plot好用很多
1.安装
sudo apt-get install ros-melodic-plotjuggler-ros
2.启动
rosrun plotjuggler plotjuggler
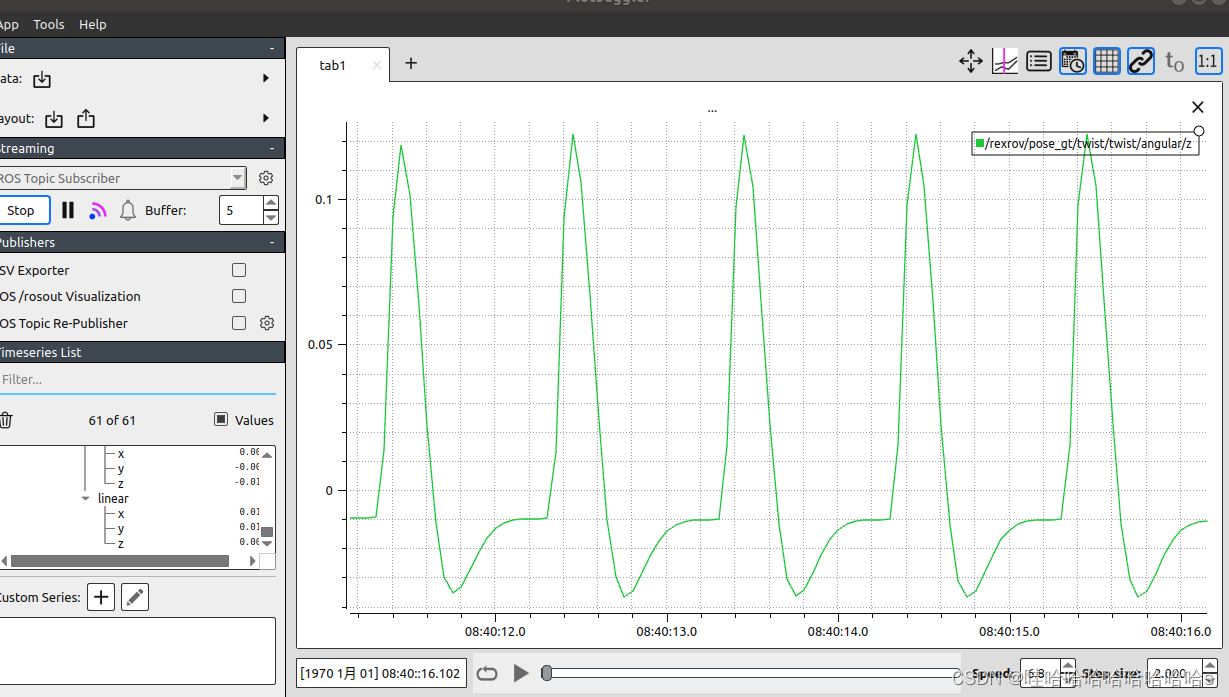
有了这个工具之后就可以方便调试控制器看响应曲线了


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




























 885
885





