







全局命名空间
/rosout前面的反斜杠“/”表明该节点名称属于全局命名空间。之所以叫做全局名称因为它们在任何地方(包括代码、命令行工具、图形界面工具等的任何地方)都可以使用。无论这些名称用作众多命令行工具的参数还是用在节点内部,它们都有明确的含义。这些名称从来不会产生二义性,也无需额外的上下文信息来决定名称指的哪个资源。如/turtle1/cmd_vel 由斜杠分开的一系列命名空间(namespace),每个斜杠代表一级命名空间。命名空间用于将相关的计算图源(节点、话题、服务和参数统称为计算图源,而每个计算图源由一个叫计算图源名称(graph resource name)的短字符串识)归类在一起。
为了指明一个计算图源,需要完整列出其所属的命名空间,尤其是有时候命名空间层次比较多,这可能会让你抓狂。这时,一个主要替代方案是让ROS为计算图源提供一个默认的命名空间,具有此特征的名称叫做相对计算图源名称(ralative graph resource name),或简称为相对名称(relative name)。
相对名称
相对名称的典型特征是它缺少全局名称带有的前斜杠“/”。例如:cmd_vel 及 count_and_log/set_logger_level理解相对名称的关键是,如果不知道ROS 解析某个计算图源时所使用的默认命名空间,相对名称并不能和特定计算图源匹配。
解析相对名称:将相对名称转化为全局名称的过程相当简单。ROS将当前默认的命名空间的名称加在相对名称的前面,从而将相对名解析为全局名称。比如,如果我们在默认命名空间为/turtle1 的地方使用相对名称cmd_vel,那么ROS 通过组合方法得 /turtle1 + cmd_vel ⇒ /turtle1/cmd_vel
相对名称也可以以一系列的命名空间开始,这些命名空间被看作是默认命名空间中的嵌套空间。举个例子,如果我们在默认命名空间为/a/b/c/d/e/f 的地方使用相对空间g/h/i/j/k,ROS 将会将其进行组合为全局命名空间/a/b/c/d/e/f /g/h/i/j/k/l 得到的全局名称就可以用于确定一个特定的计算图源,就像前面介绍全局名称的使用时一样。
当一个节点内的计算图源全部使用相对名称时,这本质上给用户提供了一种非常简单的移植手段,即用户能方便地将此节点和话题移植到其他的(比如用户自己程序的) 命名空间,而节点的原设计者并不一定参与这个过程。这种灵活性可以使得一个系统的组织结构更清晰,更重要的是能够防止在整合来自不同来源的节点发生名称冲突。作为对比,如果所有节点都使用全局名称命名自己的计算图源, 就很难实现这种高效资源整合。所以,除非一些特殊情况有特殊要求,否则编写节点时并不推荐使用全局名称。
私有名称
私有名称,以一个波浪字符(~)开始,是第三类也是最后一类计算图源名称。和相对名称一样,私有名称并不能完全确定它们自身所在的命名空间,而是需要ROS 客户端库将这个名称解析为一个全局名称。与相对名称的主要差别在于,私有名称不是用当前默认命名空间,而是用的它们节点名称作为命名空间。例如,有一个节点,它的全局名称是 /sim1/pubvel,ROS 将其私有名称∼max_vel 转换至如下全局名称:/sim1/pubvel + ~max_vel⇒ /sim1/pubvel/max_vel 这种命名方式适用的地方是每个节点内部都有这样一些资源,这些资源只与本节点有关,而不会与其他节点打交道,这些资源就可以使用私有名称,与松耦合性相对的。私有名称的关键字“private”仅仅表示其他节点不会使用它们所在的命名空间,也就是仅在命名空间层面上有意义。对于其他节点来讲,只要知道私有名称解析后的全局名称,都可以通过其全局名称访问这些计算图源。这和C++等其他类似编程语言中的关键字“private”是不同的,在这些编程语言中,系统中的其他部分是不能访问某个类的私有成员变量的。
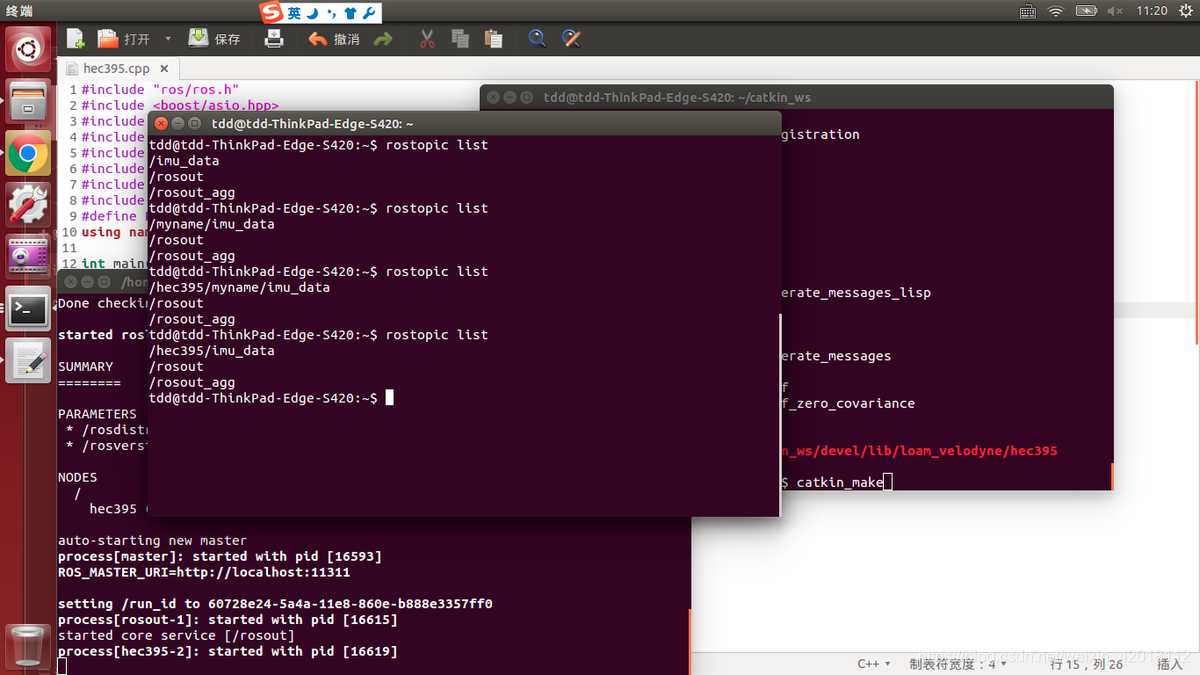
节点命名空间
ros::init(argc, argv, "hec359");
ros::NodeHandle nh;
ros::Publisher IMU_pub = nh.advertise<sensor_msgs::Imu>("imu_data", 50);
ros::NodeHandle nh("myname");
ros::NodeHandle nh("~myname");
ros::NodeHandle nh("~");















 423
423











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









