







 |
|
张喜海,范成国,曹展源,房俊龙 *,贾银江
(东北农业大学电气与信息学院,哈尔滨 150030,中国)
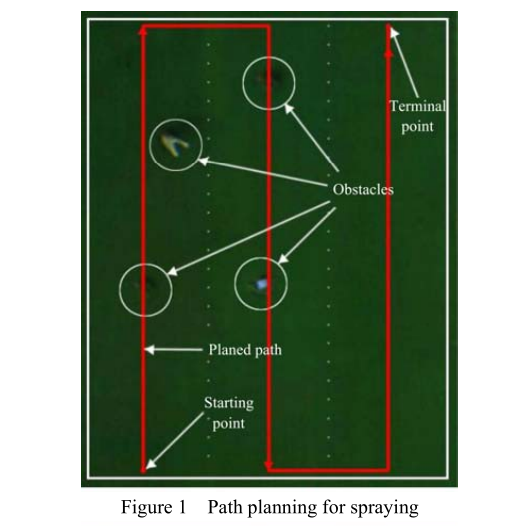
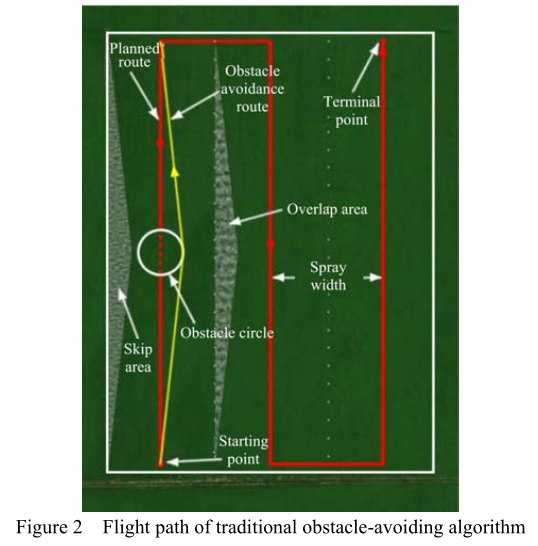
摘 要:该文针对多障碍环境下植保无人机喷施作业航迹规划问题进行了研究。首先,将喷施区域中常见的障碍进行了建模,提出了一种基于改进Dubins路径的避障路径规划方法。同时对于可能存在较多障碍情况,构建了遗传算法模型搜索最佳避障路径。其次,针对航迹规划中的转弯问题,提出了一种基于Dubins路径的最小变速次数的转弯策略。最后,仿真结果表明,在相同障碍环境下,与传统的Dubins避障算法相比,该文算法生成的路径长度增加1.6%,重喷漏喷面积减少至205.1%;随着障碍物半径的增大,该文算法在
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 192
192











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









