








本文来源:计算机视觉life
/ 导读 /
相机和激光雷达之间的时间戳同步问题一直是实时跑SLAM的先决条件。本文试图以最清晰的思路去讲明白这个事情,开始本文之前,先介绍几个基本概念。

相机特性-曝光和读出
相机获取一帧图像分为曝光和读出两个阶段。相机使用的传感器不同,相机的曝光时间和读出时间的重叠关系也有所不同,分为交叠曝光和非交叠曝光两种。
叠曝光和非交叠曝光相比,交叠曝光可以减少曝光时间对出图时间的影响。
非交叠曝光是指当前帧的曝光和读出都完成后,再进行下一帧的曝光和读出。非交叠曝光帧周期大于曝光时间与帧读出时间的和。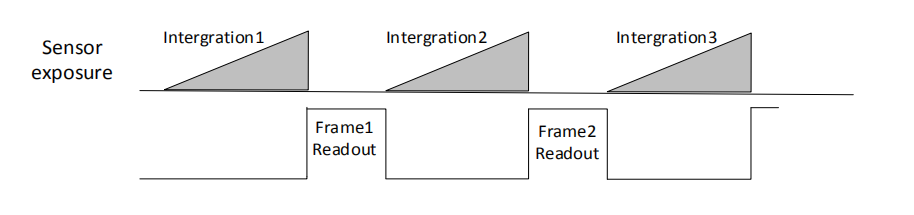 ▲内触发模式非交
▲内触发模式非交
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









