







深入学习Linux摄像头系列
深入学习Linux摄像头(二)v4l2驱动框架
文章目录
一、V4L2 框架
1.1 相关对象
v4l2驱动框架主要的对象有video_device、v4l2_device、v4l2_subdev、videobuf
-
video_device
一个字符设备,为用户空间提供设备节点(/dev/videox),提供系统调用的相关操作(open、ioctl…)
-
v4l2_device
嵌入到video_device中,表示一个v4l2设备的实例
-
v4l2_subdev
依附在v4l2_device之下,并表示一个v4l2设备的子设备,一个v4l2_devide下可以有多个sub_device
-
videobuf
v4l2驱动的缓存管理
下面有必要对v4l2_device和v4l2_subdev来进行说明
subdev的设计目的是为了多路复用,就是用一个v4l2_device可以服务多个v4l2_subdev
下面以我们手机的摄像头来举例
-
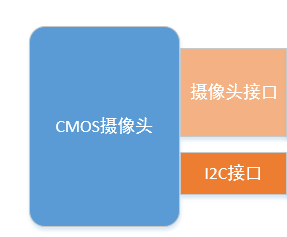
CMOS摄像头
对于一款CMOS摄像头来说,有两个接口,一个是
摄像头接口,一个是I2C接口摄像头接口负责传输图像数据,I2C接口负责传输控制信息,所以又可以将CMOS摄像头看作是一个I2C模块
如下图所示
-
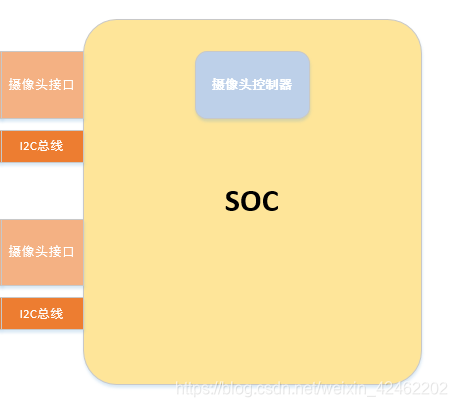
芯片片上资源
在一款芯片上面,摄像头相关的有
摄像头控制器、摄像头接口、I2C总线SOC上可以有多个摄像头控制器,多个摄像头接口,多个I2C总线
摄像头控制器负责接收和处理摄像头数据,摄像头接口负责传输图像数据,I2C总线负责传输控制信息
如下图所示
对于手机而言,一般都有两个摄像头,一个前置摄像头,一个后置摄像头,其接发下图所示
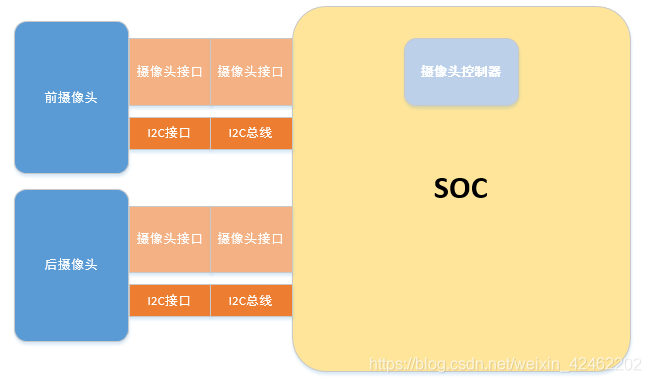
我们可以选择让控制器去操作哪一个摄像头,这就做到了使用一个摄像头控制器来控制多个摄像头,这就是多路复用
上面说要使用一个摄像头控制器去操作多个摄像头,这是我们的目的,那么在软件中是怎么实现的呢?
我们回到V4L2来,再来谈v4l2_device和v4l2_subdev
上面我们介绍到v4l2_device表示一个v4l2实例
在V4L2驱动中,使用v4l2_device来表示摄像头控制器
使用v4l2_subdev来表示具体的某一个摄像头的I2C控制模块,进而通过其控制摄像头
v4l2_device里有一个v4l2_subdev链表,可以选择v4l2_device去控制哪一个v4l2_subdev
相信到此,你对v4l2_device和v4l2_subdev就有所了解了
当然某些驱动是没有v4l2_subdev,只有video_device
经过上面的讲解,我们用一张图来总结
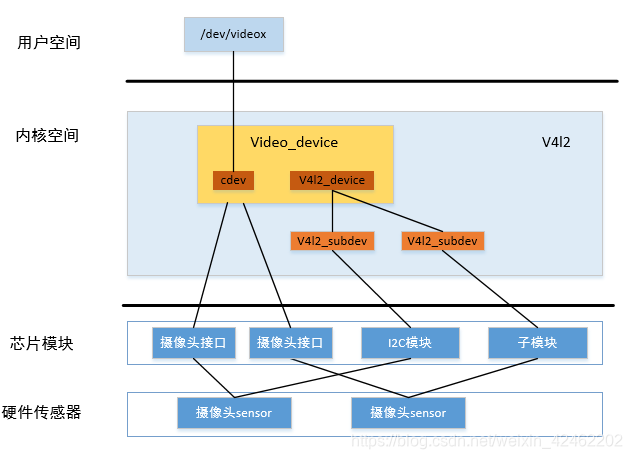
前面说video_device是一个字符设备,从图中可以看出,video_device内含一个cdev
v4l2_device是一个v4l2实例,嵌入到video_device中
v4l2_device维护者一个链表管理v4l2_subdev,v4l2_subdev表示摄像头的I2C控制模块
1.2 V4L2 框架
在理清楚V4L2中的主要对象后,我们来介绍V4L2的框架
在介绍V4L2驱动框架前,我们先回顾一下简单的字符设备的编写
- 分配一个字符设备(cdev)
- 设置一个fops
- 注册字符设备
复杂的字符设备
对于复杂的字符设备,内核都是采用分层的方法,一般分驱动核心层还有硬件相关层
核心层会帮你完成字符设备的分配,fops的设置,注册字符设备,并向硬件相关层提供一个相应的对象和注册接口
硬件相关层则需要分配相应的对象,设置对象和对象的fops,并注册到核心层中
当应用层发生系统调用,会先来到核心层,核心层再通过回调函数调用到硬件相关层的驱动
对于V4L2的驱动框架也是如此,可分为V4L2驱动核心层和硬件相关层
下面先用一张图来总结大致V4L2的驱动框架
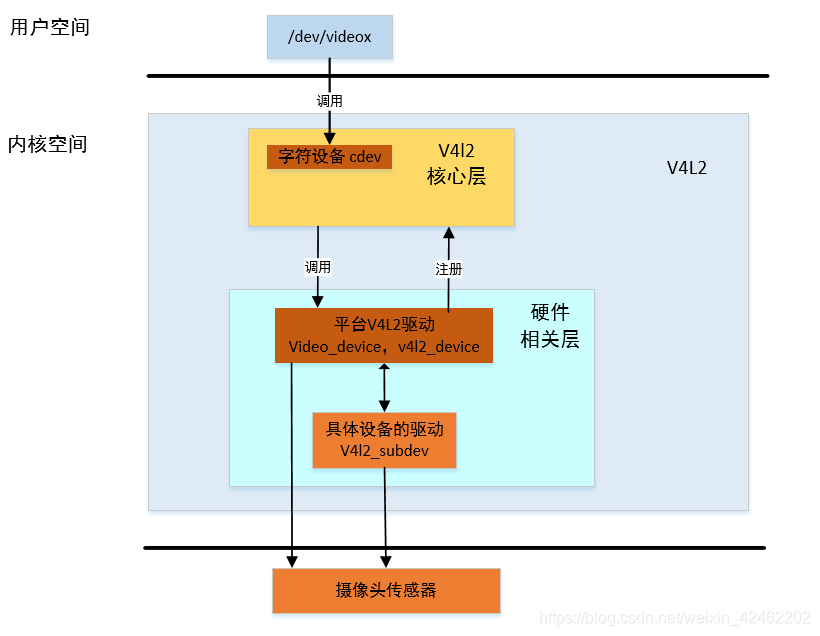
从图中可以看出V4L2分为核心层还有硬件相关层
核心层负责注册字符设备,然后提供video_device对象和相应的注册接口给硬件相关层使用
硬件相关层需要分配一个video_device并设置它,然后向核心层注册,核心层会为其注册字符设备并且创建设备节点(/dev/videox)。同时硬件相关层还需要分配和设置相应的v4l2_device和v4l2_subdev,其中v4l2_device的一个比较重要的意义就是管理v4l2_subdev,当然有一些驱动并不需要实现v4l2_subdev,此时v4l2_device的意义就不是很大了
当应用层通过/dev/video来操作设备的时候,首先会来到V4L2的核心层,核心层通过注册进的video_device的回调函数调用相应的操作函数,video_device可以直接操作硬件或者是通过v4l2_subdev来操作硬件
二、V4L2的数据结构
介绍完V4L2的驱动框架后,来看一看内核中各对象的数据结构
2.1 V4L2主要对象的数据结构
-
video_device
struct video_device { /* character device */ struct cdev *cdev; /* v4l2_device parent */ struct v4l2_device *v4l2_dev; /* device ops */ const struct v4l2_file_operations *fops; /* ioctl callbacks */ const struct v4l2_ioctl_ops *ioctl_ops; };可以看到video_device中含有一个cdev还有v4l2_device,此外还有fops和ioctl_ops,从应用层进行系统调用会经过v4l2的核心层回调到这里
其中
v4l2_file_operations和v4l2_ioctl_ops如下struct v4l2_file_operations { struct module *owner; ssize_t (*read) (struct file *, char __user *, size_t, loff_t *); ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *); unsigned int (*poll) (struct file *, struct poll_table_struct *); long (*ioctl) (struct file *, unsigned int, unsigned long); long (*unlocked_ioctl) (struct file *, unsigned int, unsigned long); unsigned long (*get_unmapped_area) (struct file *, unsigned long, unsigned long, unsigned long, unsigned long); int (*mmap) (struct file *, struct vm_area_struct *); int (*open) (struct file *); int (*release) (struct file *); };熟悉v4l2应用编程的应该都知道v4l2有很多ioctl操作,具体实现都在这里
struct v4l2_ioctl_ops { int (*vidioc_querycap)(struct file *file, void *fh, struct v4l2_capability *cap); /* Buffer handlers */ int (*vidioc_reqbufs) (struct file *file, void *fh, struct v4l2_requestbuffers *b); int (*vidioc_querybuf)(struct file *file, void *fh, struct v4l2_buffer *b); int (*vidioc_qbuf) (struct file *file, void *fh, struct v4l2_buffer *b); int (*vidioc_dqbuf) (struct file *file, void *fh, struct v4l2_buffer *b); /* Stream on/off */ int (*vidioc_streamon) (struct file *file, void *fh, enum v4l2_buf_type i); int (*vidioc_streamoff)(struct file *file, void *fh, enum v4l2_buf_type i); ... }; -
v4l2_device
struct v4l2_device { /* used to keep track of the registered subdevs */ struct list_head subdevs; ... };可以看到v4l2_device中有一个v4l2_subdev的链表,v4l2_device的主要目的时用来管理v4l2_subdev
-
v4l2_subdev
struct v4l2_subdev { struct list_head list; struct v4l2_device *v4l2_dev; const struct v4l2_subdev_ops *ops; };v4l2_subdev中有一个v4l2_subdev_ops,实现了一系列的操作,供v4l2_device调用
struct v4l2_subdev_ops { const struct v4l2_subdev_core_ops *core; const struct v4l2_subdev_tuner_ops *tuner; const struct v4l2_subdev_audio_ops *audio; const struct v4l2_subdev_video_ops *video; const struct v4l2_subdev_vbi_ops *vbi; const struct v4l2_subdev_ir_ops *ir; const struct v4l2_subdev_sensor_ops *sensor; };struct v4l2_subdev_core_ops { ... int (*s_config)(struct v4l2_subdev *sd, int irq, void *platform_data); int (*init)(struct v4l2_subdev *sd, u32 val); int (*s_gpio)(struct v4l2_subdev *sd, u32 val); int (*g_ctrl)(struct v4l2_subdev *sd, struct v4l2_control *ctrl); int (*s_ctrl)(struct v4l2_subdev *sd, struct v4l2_control *ctrl); int (*s_std)(struct v4l2_subdev *sd, v4l2_std_id norm); long (*ioctl)(struct v4l2_subdev *sd, unsigned int cmd, void *arg); ... };struct v4l2_subdev_video_ops { ... int (*enum_fmt)(struct v4l2_subdev *sd, struct v4l2_fmtdesc *fmtdesc); int (*g_fmt)(struct v4l2_subdev *sd, struct v4l2_format *fmt); int (*try_fmt)(struct v4l2_subdev *sd, struct v4l2_format *fmt); int (*s_fmt)(struct v4l2_subdev *sd, struct v4l2_format *fmt); int (*cropcap)(struct v4l2_subdev *sd, struct v4l2_cropcap *cc); int (*g_crop)(struct v4l2_subdev *sd, struct v4l2_crop *crop); int (*s_crop)(struct v4l2_subdev *sd, struct v4l2_crop *crop); int (*g_parm)(struct v4l2_subdev *sd, struct v4l2_streamparm *param); int (*s_parm)(struct v4l2_subdev *sd, struct v4l2_streamparm *param); ... };
2.2 V4L2提供的注册接口
-
video_device
注册
int video_register_device(struct video_device *vdev, int type, int nr);注销
void video_unregister_device(struct video_device *vdev); -
v4l2_device
注册
int v4l2_device_register(struct device *dev, struct v4l2_device *v4l2_dev);注销
void v4l2_device_unregister(struct v4l2_device *v4l2_dev); -
v4l2_subdev
注册
int v4l2_device_register_subdev(struct v4l2_device *v4l2_dev, struct v4l2_subdev *sd);注销
void v4l2_device_unregister_subdev(struct v4l2_subdev *sd);
三、源码剖析
3.1 V4L2驱动模板
此示例中并没有设计到v4l2_subdev,这部分将会在后面分析具体的驱动中出现
#include <...>
static struct video_device* video_dev;
static struct v4l2_device v4l2_dev;
/* 实现各种系统调用 */
static const struct v4l2_file_operations video_dev_fops = {
.owner = THIS_MODULE,
.release = vdev_close,
.read = vdev_read,
.poll = vdev_poll,
.ioctl = video_ioctl2,
.mmap = vdev_mmap,
};
/* 实现各种系统调用 */
static const struct v4l2_ioctl_ops video_dev_ioctl_ops = {
.vidioc_querycap = vidioc_querycap,
.vidioc_enum_fmt_vid_cap = vidioc_enum_fmt_vid_cap,
.vidioc_g_fmt_vid_cap = vidioc_g_fmt_vid_cap,
.vidioc_try_fmt_vid_cap = vidioc_try_fmt_vid_cap,
.vidioc_s_fmt_vid_cap = vidioc_s_fmt_vid_cap,
.vidioc_reqbufs = vidioc_reqbufs,
.vidioc_querybuf = vidioc_querybuf,
.vidioc_qbuf = vidioc_qbuf,
.vidioc_dqbuf = vidioc_dqbuf,
.vidioc_enum_input = vidioc_enum_input,
.vidioc_g_input = vidioc_g_input,
.vidioc_s_input = vidioc_s_input,
.vidioc_streamon = vidioc_streamon,
.vidioc_streamoff = vidioc_streamoff,
};
static int __init video_init(void)
{
/* 分配并设置一个video_device */
video_dev = video_device_alloc();
video_dev->fops = &video_dev_fops;
video_dev->ioctl_ops = &video_dev_ioctl_ops;
video_dev->release = video_device_release;
video_dev->tvnorms = V4L2_STD_525_60;
video_dev->current_norm = V4L2_STD_NTSC_M;
/* 注册一个v4l2_device */
v4l2_device_register(video_dev->dev, &v4l2_dev);
video_dev->v4l2_dev = &video_dev;
/* 注册一个video_device字符设备 */
video_register_device(video_dev, VFL_TYPE_GRABBER, -1);
return 0;
}
static void __exit video_exit(void)
{
video_unregister_device(video_dev);
v4l2_device_unregister(&v4l2_dev);
video_device_release(video_dev);
}
module_init(video_init);
module_exit(video_exit);
如果你熟悉v4l2应用编程的话,你应该知道v4l2有许多ioctl操作,上面的模板就实现了很多ioctl操作
3.2 V4L2源码剖析
下面我们来分析分析源码
在上面的video_init中,我们分配并设置了video_dev,注册了v4l2_device(v4l2_device_register),然后向v4l2核心层注册video_device(video_register_device)
我们先来看v4l2_device_register
int v4l2_device_register(struct device *dev, struct v4l2_device *v4l2_dev)
{
INIT_LIST_HEAD(&v4l2_dev->subdevs);
spin_lock_init(&v4l2_dev->lock);
dev_set_drvdata(dev, v4l2_dev);
...
}
从源码中可以看出v4l2_device_register并没有做什么事,只是初始化链表,自旋锁,还有设置数据,这函数并不是我们的重点
下面来仔细分析video_register_device
int video_register_device(struct video_device *vdev, int type, int nr)
{
/* 分配字符设备 */
vdev->cdev = cdev_alloc();
/* 设置fops */
vdev->cdev->ops = &v4l2_fops;
/* 注册字符设备 */
cdev_add(vdev->cdev, MKDEV(VIDEO_MAJOR, vdev->minor), 1);
/* 生成设备节点 */
dev_set_name(&vdev->dev, "%s%d", name_base, vdev->num);
device_register(&vdev->dev);
/* 设置全局数组 */
video_device[vdev->minor] = vdev;
}
可以看到这个函数会为video_device分配一个cdev,然后设置fops,向内核注册字符设备,再者生成设备节点
然后设置video_device全局数组,video_device一个全局数组
static struct video_device *video_device[VIDEO_NUM_DEVICES];
保存着注册的video_device
接下来看一下其中设置的fops(v4l2_fops)
static const struct file_operations v4l2_fops = {
.owner = THIS_MODULE,
.read = v4l2_read,
.write = v4l2_write,
.open = v4l2_open,
.get_unmapped_area = v4l2_get_unmapped_area,
.mmap = v4l2_mmap,
.ioctl = v4l2_ioctl,
.release = v4l2_release,
.poll = v4l2_poll,
.llseek = no_llseek,
};
这个是video_device中的字符设备对应的fops,应用层发生系统调用会率先调用到这里,我们来好好看一看这些调用
-
v4l2_open
static int v4l2_open(struct inode *inode, struct file *filp) { struct video_device *vdev; /* 根据次设备获得video_device */ vdev = video_devdata(filp); /* 回调video_device的fops */ if (vdev->fops->open) ret = vdev->fops->open(filp); //回调video }从这个函数可以看到,发生系统调用首先来到v4l2核心层的字符设备,然后再回调到对应的video_device,video_device在前面已经实现了
v4l2_file_operations和v4l2_ioctl_ops一系列回调 -
v4l2_ioctl
V4L2的应用编程会有非常多的ioctl,会先调用到此处
static int v4l2_ioctl(struct inode *inode, struct file *filp, unsigned int cmd, unsigned long arg) { struct video_device *vdev = video_devdata(filp); /* 回调到video_device中 */ return vdev->fops->ioctl(filp, cmd, arg); }下面来看一看video_device怎么实现ioctl
static const struct v4l2_file_operations video_dev_fops = { .owner = THIS_MODULE, .release = vdev_close, .read = vdev_read, .poll = vdev_poll, .ioctl = video_ioctl2, .mmap = vdev_mmap, };从上面驱动程序的编写,我们可以知道video_device对应ioctl就是video_ioctl2,这个函数是内核提供的,我们看一看这个函数的内容
long video_ioctl2(struct file *file, unsigned int cmd, unsigned long arg) { __video_do_ioctl(file, cmd, parg); }static long __video_do_ioctl(struct file *file, unsigned int cmd, void *arg) { /* 获取video_device */ struct video_device *vfd = video_devdata(file); /* 获取video_device的ioctl_ops */ const struct v4l2_ioctl_ops *ops = vfd->ioctl_ops; switch (cmd) { case VIDIOC_QUERYCAP: ops->vidioc_querycap(file, fh, cap); case VIDIOC_ENUM_FMT: ops->vidioc_enum_fmt_vid_cap(file, fh, f); ... } }可以看出,最终会调用到video_device实现的
v4l2_ioctl_ops/* 实现各种系统调用 */ static const struct v4l2_ioctl_ops video_dev_ioctl_ops = { .vidioc_querycap = vidioc_querycap, .vidioc_enum_fmt_vid_cap = vidioc_enum_fmt_vid_cap, .vidioc_g_fmt_vid_cap = vidioc_g_fmt_vid_cap, .vidioc_try_fmt_vid_cap = vidioc_try_fmt_vid_cap, .vidioc_s_fmt_vid_cap = vidioc_s_fmt_vid_cap, .vidioc_reqbufs = vidioc_reqbufs, .vidioc_querybuf = vidioc_querybuf, .vidioc_qbuf = vidioc_qbuf, .vidioc_dqbuf = vidioc_dqbuf, .vidioc_enum_input = vidioc_enum_input, .vidioc_g_input = vidioc_g_input, .vidioc_s_input = vidioc_s_input, .vidioc_streamon = vidioc_streamon, .vidioc_streamoff = vidioc_streamoff, };所以系统调用最先都会调用到字符设备的fops,然后经过v4l2核心层最终调用到video_device这里
关于v4l2的驱动框架就分析到这里,关于更加详细的实现v4l2驱动,将在后续文章中通过实例讲解














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









