







简介:Bootloader源代码是嵌入式系统中的核心部分,尤其在DSP系统中至关重要,负责初始化硬件和加载软件。本文档将深入分析针对DSP处理器的Bootloader源代码,包括系统初始化、内存管理、固件更新等功能。通过讲解关键文件如startImage.c、main.c、sdmmcboot.c、flash.c、ether.c、utils.c等,以及头文件font.h、sd.h、x1sc6.h的作用,帮助开发者理解和修改Bootloader,以适配特定硬件平台。 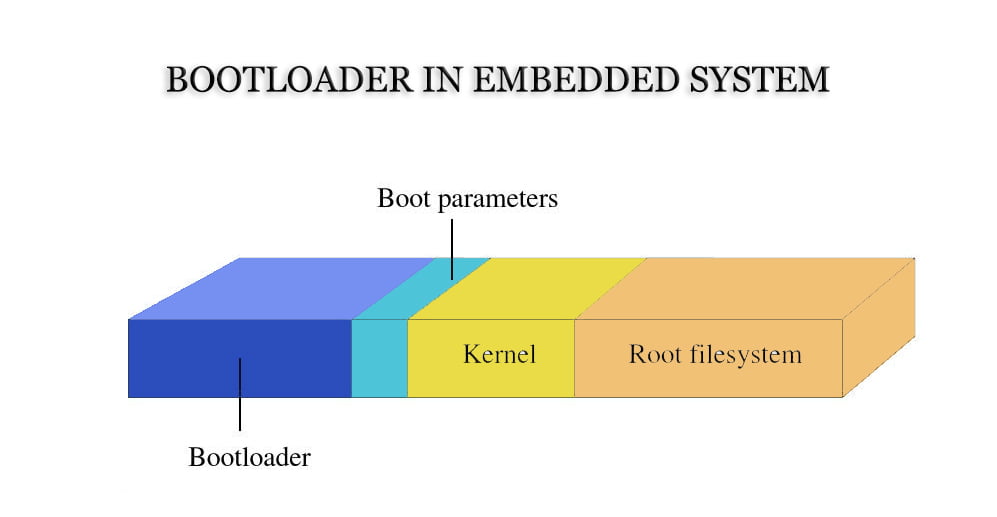
1. Bootloader基础与DSP角色
在探讨嵌入式系统和数字信号处理器(DSP)的世界中,Bootloader作为一个不可或缺的角色,负责在硬件上电之后,首先运行并加载操作系统,它对整个系统的稳定性有着至关重要的影响。本章节将从Bootloader的基础概念入手,深入理解其在DSP环境中的作用。
1.1 Bootloader的定义与功能
Bootloader是计算机程序的启动加载器,它通常存储在嵌入式设备的非易失性存储器中,如闪存或EEPROM。Bootloader的主要任务是初始化硬件设备,设置系统环境,以及加载操作系统。在这个过程中,它为软件层提供了一个抽象层,保证操作系统的正常加载和执行。
1.2 Bootloader与DSP的关系
DSP是专门设计用来快速进行数学运算的处理器,非常适合执行音频、图像处理、数据压缩、网络通信等任务。Bootloader在DSP系统中扮演着初始化管理的角色,它确保DSP环境配置正确,从而使系统能够顺利进入其应用功能。DSP的高性能和Bootloader的快速启动能力结合,为实时处理提供了可能。
2. Bootloader源代码文件功能分析
2.1 启动阶段的源代码结构
2.1.1 启动向量与初始寄存器设置
启动向量和初始寄存器的设置是Bootloader启动过程中的首要步骤。这些设置确保处理器能够从正确的内存位置开始执行代码,并且所有的硬件环境都处于一个已知的状态。在许多微控制器和DSP平台中,启动向量是固定的,而初始寄存器的设置则依据硬件规格书来完成。
// 伪代码示例:启动向量和寄存器初始化
void startup_sequence(void) {
// 设置中断向量表的地址
SCB->VTOR = APPLICATION_ADDRESS + 0x1000;
// 初始化堆栈指针
__set_MSP(*(volatile uint32_t*)APPLICATION_ADDRESS);
// 初始化其他关键寄存器,如时钟控制寄存器
RCC->CR |= RCC_CR_HSION; // 启动内部高速时钟
// 更多寄存器初始化代码...
}
// 向量表中的中断向量
__root const uint32_t girtsVectorTable[] @ ".isr_vector" = {
(uint32_t)&_estack, // 初始堆栈指针
(uint32_t)&startup_sequence, // 复位处理函数的地址
// 其他中断处理函数的地址...
};
在上述代码中,首先通过设置 SCB->VTOR 来指定中断向量表的地址,确保中断发生时,处理器能够正确找到中断处理函数的入口。接着,使用 __set_MSP 宏来设置主堆栈指针(MSP),它是执行环境的基本组成部分。初始化代码还包括配置处理器内部时钟,以及其他可能影响系统行为的寄存器。
2.1.2 中断向量表的建立
中断向量表是Bootloader与操作系统中使用的中断服务例程(ISR)之间的桥梁。该表通常位于内存中的固定位置,并包含所有可能的中断服务例程的入口地址。当中断发生时,处理器会读取此表并跳转到相应的ISR执行。
.section .isr_vector, "a"
.type girtsVectorTable, %object
.size girtsVectorTable, .-girtsVectorTable
girtsVectorTable:
.word _estack // 堆栈指针初始值
.word startup_sequence // 复位中断服务例程
.word nmi_handler // NMI中断处理函数
.word hardfault_handler // 硬件错误处理函数
// 更多中断向量...
在汇编语言中,中断向量表可以通过 .section 指令定义,并通过 .word 指令为每个中断向量分配空间。在这个表中,第一个条目是堆栈指针的初始值,第二个是复位中断服务例程的地址,后面跟随其他中断向量。
2.2 源代码中的关键函数解析
2.2.1 硬件抽象层(HAL)函数作用
硬件抽象层(HAL)是Bootloader中的一个关键组件,它为上层软件提供了一个通用的硬件接口。HAL可以隐藏底层硬件细节,提供一个统一的API,使得Bootloader能更容易地适应不同的硬件平台。
// 伪代码示例:HAL层函数,用于读取外设状态
uint32_t HAL_Peripheral_ReadStatus(Peripheral_t *pPeripheral) {
// 通用硬件访问代码...
return pPeripheral->statusRegister;
}
// 外设结构体定义
typedef struct {
volatile uint32_t *statusRegister;
} Peripheral_t;
上述代码中, HAL_Peripheral_ReadStatus 函数接收一个指向 Peripheral_t 结构体的指针,该结构体包含了外设的状态寄存器地址。HAL函数通过这个地址读取并返回状态寄存器的值。这使得上层软件可以简单地调用 HAL_Peripheral_ReadStatus 函数而无需关心硬件的具体细节。
2.2.2 系统初始化函数的工作流程
系统初始化函数是Bootloader在启动过程中必须执行的代码,以确保所有的硬件模块都处于正确的工作状态。这个函数通常包括了处理器内核的配置、内存控制器的设置,以及外设的初始化等。
// 伪代码示例:系统初始化函数
void System_Init(void) {
// 初始化内存控制器
Memory_Controller_Init();
// 初始化处理器时钟系统
Clock_System_Init();
// 初始化外设
Peripheral_Init();
// 更多初始化代码...
}
void Memory_Controller_Init(void) {
// 设置内存控制器的参数
// 启用对应的内存区域...
}
void Clock_System_Init(void) {
// 配置处理器的时钟源和分频器
// 使能所需的时钟信号...
}
void Peripheral_Init(void) {
// 初始化特定的外设模块,如GPIO、UART等
// 设置外设工作模式和相关参数...
}
在 System_Init 函数中,首先初始化内存控制器来确保处理器可以正确访问内存。然后配置时钟系统,这一步骤对于确保系统的性能至关重要。最后,进行外设的初始化,根据应用需求设置相应的模式和参数。
2.2.3 启动完成后的跳转处理
在Bootloader完成了所有必要的初始化工作之后,它需要将控制权转移给操作系统或应用程序。这一跳转过程通常涉及到设置程序计数器(PC)的值,并且确保栈空间已经准备就绪。
// 伪代码示例:跳转到主应用程序的代码
void Jump_To_Application(void) {
// 跳转前的准备,比如设置栈指针
__set_MSP(*(volatile uint32_t*)APPLICATION_ADDRESS);
// 加载应用程序的起始地址到PC寄存器
typedef void (*AppPtr)(void);
AppPtr appMainPtr = (AppPtr)(*(volatile uint32_t*)(APPLICATION_ADDRESS + 4));
appMainPtr();
}
#define APPLICATION_ADDRESS 0x*** // 假设应用程序的起始地址
在这段代码中, Jump_To_Application 函数首先设置了主栈指针(MSP)到应用程序的起始地址,这是运行应用程序的前提。接着定义了一个指向应用程序入口点的函数指针,并将程序计数器(PC)设置为该地址,以实现跳转。这确保了当 Jump_To_Application 函数返回时,处理器将从应用程序的起始地址开始执行代码。
以上是对Bootloader源代码文件功能分析的第二章节中的启动阶段源代码结构和关键函数的深入解析。接下来的章节将继续探讨硬件初始化与操作系统加载过程。
3. 硬件初始化与操作系统加载过程
3.1 硬件平台的启动和检测
3.1.1 处理器和外设的自检过程
在系统上电或复位后,硬件初始化的第一步通常是对处理器和关键外设执行自检(Power-On Self-Test,POST)。这一过程确保了硬件组件功能正常,没有物理损坏或配置错误。处理器自检通常包括检查内部寄存器、缓存以及执行简单的算术运算。如果自检失败,通常会通过LED指示或通过内置的诊断接口报告错误。
// 示例:简单的POST伪代码
void POSTProcessor() {
// 初始化内部寄存器
initRegisters();
// 检查高速缓存
checkCache();
// 执行算术测试
arithmeticTest();
// 如果所有检查都通过,则继续初始化
if (cacheTestPassed && arithmeticTestPassed) {
continueInitialization();
} else {
// 报告错误
reportPOSTFailure();
}
}
处理器自检之后是外设自检。每个外设,比如串口、I2C设备、SPI设备等,都会经过一系列的测试来验证它们的正常运行。这可能包括读写测试、时序检查以及和主控制器的数据交换测试。
3.1.2 时钟和电源管理的初始化
处理器时钟和电源管理是硬件初始化的另一个关键部分。正确的时钟频率对于系统的稳定运行至关重要。时钟初始化涉及选择合适的时钟源、配置PLL(Phase-Locked Loop)以生成所需的时钟频率,并确保时钟的稳定性和精确性。例如,DSP处理器的高速内核时钟必须稳定,以避免数据处理错误或系统崩溃。
电源管理初始化包括设置电源供应电压水平、配置电源管理单元(PMU)以实现有效的电源消耗控制。在许多现代设备中,动态电压和频率调整(DVFS)技术被用来在不影响性能的情况下节约能源。
// 时钟初始化的伪代码
void initClocks() {
// 选择时钟源
selectClockSource();
// 配置PLL
configurePLL();
// 设置核心和外设的时钟频率
setCoreFrequency();
setPeripheralFrequency();
}
// 电源管理初始化的伪代码
void initPowerManagement() {
// 设置电源供应电压
setPowerSupplyVoltage();
// 配置DVFS
configureDVFS();
// 启动电源管理单元
startPMU();
}
3.2 操作系统的加载机制
3.2.1 从存储介质到内存的映射
操作系统加载过程的第一步是从存储介质(如硬盘、固态硬盘或闪存)到内存的映射。这涉及到查找操作系统镜像的存放位置,然后将其内容完整地读取到内存中。在嵌入式系统中,存储介质可能是内部闪存或者外部的SD卡。这个过程的关键在于正确设置存储介质的读取参数,比如读取起始地址、扇区大小和数据长度。
// 从存储介质到内存的映射示例代码
void loadOperatingSystem(char* osImageLocation, void* memoryLocation) {
// 设置读取参数
uint32_t sectorSize = 512; // 以字节为单位
uint32_t imageDataLength = getOSImageSize(osImageLocation);
// 打开存储介质
StorageMedium medium = openStorage(osImageLocation);
// 检查介质是否可以读取
if (medium.canRead()) {
// 从介质读取数据到内存
medium.read(medium(startDate), memoryLocation, imageDataLength);
} else {
// 报告错误
reportMediumError();
}
}
3.2.2 操作系统的解压缩与重定位
许多操作系统镜像都是压缩的,以节省存储空间和减少加载时间。因此,初始化过程中的第二步是解压缩操作系统镜像。这通常涉及到在内存中执行解压缩算法,将压缩的数据转换为可执行代码。解压缩后,系统镜像可能需要重新定位以适应内存结构。例如,在一些DSP平台中,内存地址可能不是线性连续的,需要特定的地址映射来保证操作系统能够正确执行。
3.2.3 操作系统启动参数的配置
最终,操作系统需要配置启动参数,这些参数定义了系统的硬件配置、启动选项以及其他必要的信息。这些参数可能包括内存大小、处理器类型、启动设备的优先级等。操作系统会根据这些参数来进行进一步的初始化和配置。配置启动参数通常通过设置一组预定义的内存地址来完成,这些地址中的内容会在系统启动时由引导加载程序解析。
// 操作系统启动参数配置示例代码
void configureOSStartParameters(struct OSParams* params) {
// 设置内存大小参数
params->memorySize = getMemorySize();
// 设置处理器类型参数
params->processorType = getProcessorType();
// 设置启动设备优先级
params->bootDevicePriority = getBootPriority();
// 将参数写入预定义的内存地址
writeMemory(params, PREDEFINED_OS_PARAM_ADDR);
}
硬件初始化和操作系统加载是Bootloader过程中的关键环节,它们确保了系统能够从最基础的硬件级别逐步构建到能够执行复杂任务的完整操作系统。在分析这些过程时,要确保对各个阶段的细节有充分的理解,以便优化和故障排查。
4. 内存管理与外设初始化
4.1 内存架构的初始化
4.1.1 DRAM控制器的配置
DRAM(动态随机存取存储器)控制器在系统启动时负责初始化DRAM的配置参数,这些参数包括时序、延迟和大小等。正确配置DRAM控制器对于系统稳定运行至关重要。以下是配置DRAM控制器的一般步骤,以及相应的代码块和逻辑分析:
// 示例代码块,展示DRAM控制器的基本配置流程
void dram_controller_init(uint32_t dram_size) {
// 1. 设置DRAM的大小
dram_set_size(dram_size);
// 2. 设置DRAM的时序参数,包括预充电、激活到预充电、行到行延迟等
dram_set_timings(DRAM_TIMING_SET_1);
// 3. 初始化DRAM的内存映射,创建物理和虚拟地址的映射关系
dram_init_mapping();
// 4. 检查DRAM的初始化是否成功,确保所有步骤正确无误
dram_check_init_status();
}
-
dram_set_size函数用于设置DRAM的大小,确保控制器能够管理可用的物理内存空间。 -
dram_set_timings函数负责设置DRAM的时序参数,这对于保证数据正确读写至关重要。 -
dram_init_mapping函数创建内存映射,这是实现虚拟内存和物理内存映射关系的基础。 -
dram_check_init_status函数用于检查DRAM初始化后的状态,确保内存能够被正确访问。
4.1.2 内存分配策略和初始化过程
内存分配策略的目的是为了高效地使用内存资源,而初始化过程则是确保内存区域可以被操作系统和应用程序所使用。内存分配策略包括动态分配和静态分配。动态分配是根据程序运行时的实际需求进行内存分配,而静态分配则是在系统启动时预先定义内存区域。
初始化过程通常涉及以下几个阶段:
- 内存区域划分 :将物理内存划分成不同的区域,包括内核空间、用户空间、设备内存等。
- 初始化内存管理单元(MMU) :为操作系统提供虚拟地址到物理地址映射的能力。
- 建立内存页表 :操作系统通过页表来管理虚拟内存和物理内存之间的映射关系。
// 示例代码块,展示内存初始化的一部分
void memory_init() {
// 1. 划分内存区域,为不同类型的内存分配空间
memory_partition();
// 2. 初始化内存管理单元(MMU)
mmu_init();
// 3. 建立内存页表,为页式内存管理做准备
paging_init();
}
-
memory_partition函数会根据系统的内存需求和硬件能力划分出不同的内存区域。 -
mmu_init函数将设置MMU,确保内存虚拟化机制能够正确工作。 -
paging_init函数负责初始化页表,这是实现虚拟内存系统的基础。
4.2 外设和设备驱动的加载
4.2.1 标准外设的初始化顺序
标准外设,如串口、USB控制器、以太网接口等,在系统启动过程中需要被顺序初始化。初始化顺序通常根据外设依赖关系和功能优先级来确定。一般来说,串口作为最基本的调试接口,会在最开始被初始化。以下是标准外设初始化的一般步骤:
// 示例代码块,展示标准外设初始化顺序
void peripherals_init() {
// 1. 初始化串口外设,用于调试输出
serial_init();
// 2. 初始化USB控制器,用于后续的设备连接和通信
usb_init();
// 3. 初始化以太网接口,用于网络通信
ethernet_init();
}
-
serial_init函数用于初始化串口,以便于调试信息的输出。 -
usb_init函数负责USB控制器的初始化,为连接USB设备做准备。 -
ethernet_init函数用于初始化以太网接口,保证系统能够进行网络通信。
4.2.2 特殊外设的驱动程序加载
对于具有特殊功能的外设,如GPU、高精度定时器、传感器等,需要加载专门的驱动程序。这些驱动程序通常在标准外设初始化之后加载,以便于它们可以使用操作系统提供的标准接口和资源。驱动程序加载的一般步骤如下:
// 示例代码块,展示特殊外设驱动程序加载
void specialized_peripherals_init() {
// 1. 加载GPU驱动程序,支持图形界面的显示
gpu_load_driver();
// 2. 加载高精度定时器驱动程序,提供精确时间控制
timer_load_driver();
// 3. 加载传感器驱动程序,获取传感器数据
sensor_load_driver();
}
-
gpu_load_driver函数加载GPU驱动程序,为图形界面的显示提供支持。 -
timer_load_driver函数加载高精度定时器驱动程序,这些定时器能够提供高精度的时间控制和计时功能。 -
sensor_load_driver函数负责加载传感器的驱动程序,以便于从各种传感器中收集数据。
在本章节中,我们深入了解了Bootloader在内存管理与外设初始化方面的功能和实现。我们探讨了DRAM控制器的配置方法、内存分配策略以及标准和特殊外设的初始化过程。接下来,我们将继续探索Bootloader进阶功能,包括固件更新机制、闪存操作、网络引导和辅助功能等。这些高级特性是Bootloader能够适应多样化硬件和软件环境的关键所在。
5. Bootloader进阶功能解析
5.1 固件更新机制与SD/MMC卡交互
固件更新是维持设备长期运行和安全性的重要过程。SD/MMC卡作为常用的存储介质,与Bootloader的交互在固件更新中扮演着关键角色。
5.1.1 固件更新流程详解
固件更新流程通常包括以下几个步骤:
- 准备阶段 :检查固件更新文件的完整性,确保更新的必要性和安全性。
- 更新阶段 :通过SD/MMC卡等介质将固件文件复制到设备的临时存储区域。
- 验证阶段 :使用校验算法对复制的固件文件进行完整性校验。
- 应用阶段 :在确保文件正确无误后,更新固件,并在重启时加载新的固件。
5.1.2 SD/MMC卡通信协议与实现
SD/MMC卡的通信协议涉及到底层的硬件通信机制,包括CMD命令的发送和响应解析等。
// 示例:发送CMD0复位命令
void SDCard_Reset() {
uint8_t cmd[6] = {0x40 | 0, 0, 0, 0, 0, 0x95};
// 发送CMD0并检查响应 ...
}
// 示例:发送CMD1查询OCR寄存器
uint8_t SDCard_Check_OCR() {
uint8_t cmd[6] = {0x40 | 1, 0, 0, 0, 0, 0xFF};
// 发送CMD1并检查响应 ...
}
5.2 闪存操作与网络引导功能
闪存操作是Bootloader中处理存储的一种方式,而网络引导则是另一种引导方式,允许通过网络接口加载操作系统。
5.2.1 闪存读写操作的原理与实现
闪存的读写操作涉及到对存储单元的编程和擦除。通常使用特定的算法来确保数据的可靠性和寿命。
// 示例:擦除闪存区域
void Flash_EraseSector(uint32_t sectorAddress) {
// 选择扇区并发送擦除命令 ...
}
// 示例:向闪存写入数据
void Flash_WriteData(uint32_t address, uint8_t* data, uint16_t size) {
// 确保地址和数据对齐,然后写入数据 ...
}
5.2.2 网络引导过程中的关键步骤
网络引导的关键步骤包括:通过网络接口获取固件、验证固件的有效性以及最终将固件加载到内存中。
// 示例:通过网络接口接收固件数据
void Network_BootReceiveFirmware() {
// 初始化网络堆栈,设置IP地址和端口 ...
// 循环接收固件数据包并存储到内存 ...
}
5.3 辅助函数与显示字体定义
辅助函数为Bootloader中的其他模块提供了便利,而显示字体定义则影响到用户界面的展示。
5.3.1 常用辅助函数的作用与效率优化
辅助函数可能包括时间延迟、内存清零等,它们通常针对特定硬件平台进行了优化。
// 示例:硬件相关的延时函数
void Hardware_DelayMs(uint32_t ms) {
// 根据硬件时钟频率实现精确的毫秒级延时 ...
}
5.3.2 显示字体的存储与字体渲染技术
字体存储通常涉及到压缩技术,而渲染技术则需要高效的算法以适应不同分辨率的显示设备。
// 示例:字体渲染到屏幕
void Render_FontToScreen(const char* fontData, uint8_t* screenBuffer, uint16_t x, uint16_t y) {
// 解析字体数据并渲染到屏幕的指定位置 ...
}
5.4 型号特定外设或库的接口处理
不同型号的DSP处理器可能会有不同的外设接口和库文件,Bootloader需要处理这些差异。
5.4.1 不同DSP型号外设的配置与兼容
在Bootloader中需要对外设进行初始化配置,并且考虑不同型号之间的兼容性问题。
// 示例:初始化特定型号的DSP外设
void DSP_Peripheral_Init(uint32_t型号ID) {
switch(型号ID) {
case 型号1:
// 配置型号1的外设 ...
break;
case 型号2:
// 配置型号2的外设 ...
break;
// 更多型号处理 ...
}
}
5.4.2 库文件的链接与版本管理
库文件的链接和版本管理对于维护Bootloader的稳定性和兼容性至关重要。
// 示例:链接库文件
void Link_Library(const char* libraryName) {
// 将指定的库文件链接到Bootloader中 ...
}
// 示例:版本检查
bool Check_LibraryVersion(const char* libraryName, uint16_t requiredVersion) {
uint16_t currentVersion = Get_LibraryCurrentVersion(libraryName);
return currentVersion >= requiredVersion;
}
5.5 设计与实现的深度理解
了解Bootloader的设计与实现对于提升系统的可靠性和安全性具有重要意义。
5.5.1 Bootloader设计的考量点
Bootloader的设计需要考虑启动速度、系统兼容性、固件更新机制以及错误处理机制等多个方面。
graph TD
A[启动速度] -->|优化| B[快速启动]
C[系统兼容性] -->|支持| D[多平台运行]
E[固件更新机制] -->|实现| F[安全可靠更新]
G[错误处理机制] -->|增强| H[稳定运行]
5.5.2 系统可扩展性与安全性的实现
Bootloader的可扩展性体现在其支持不同的操作系统和硬件配置,而安全性则要求实现加密和签名机制,防止非法固件的加载。
// 示例:固件加密校验
bool Firmware_CheckEncryption(uint8_t* firmware, uint32_t size) {
// 检查固件是否加密并验证签名 ...
return true; // 如果校验通过
}
简介:Bootloader源代码是嵌入式系统中的核心部分,尤其在DSP系统中至关重要,负责初始化硬件和加载软件。本文档将深入分析针对DSP处理器的Bootloader源代码,包括系统初始化、内存管理、固件更新等功能。通过讲解关键文件如startImage.c、main.c、sdmmcboot.c、flash.c、ether.c、utils.c等,以及头文件font.h、sd.h、x1sc6.h的作用,帮助开发者理解和修改Bootloader,以适配特定硬件平台。















 703
703

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









