






提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
基础环境安装
下载 Omniverse
 从左下角的
从左下角的 Download中选择合适的版本下载即可;
下载完成后:
chmod +x omniverse-launcher-linux.AppImage
然后双击 omniverse-launcher-linux.AppImage 即可打开使用
PS: 初次使用,需要登录下 NV 帐号
安装 Isaac Sim
方法一:
在 交易所 中搜索 isaac sim 然后选择对应的版本下载就可
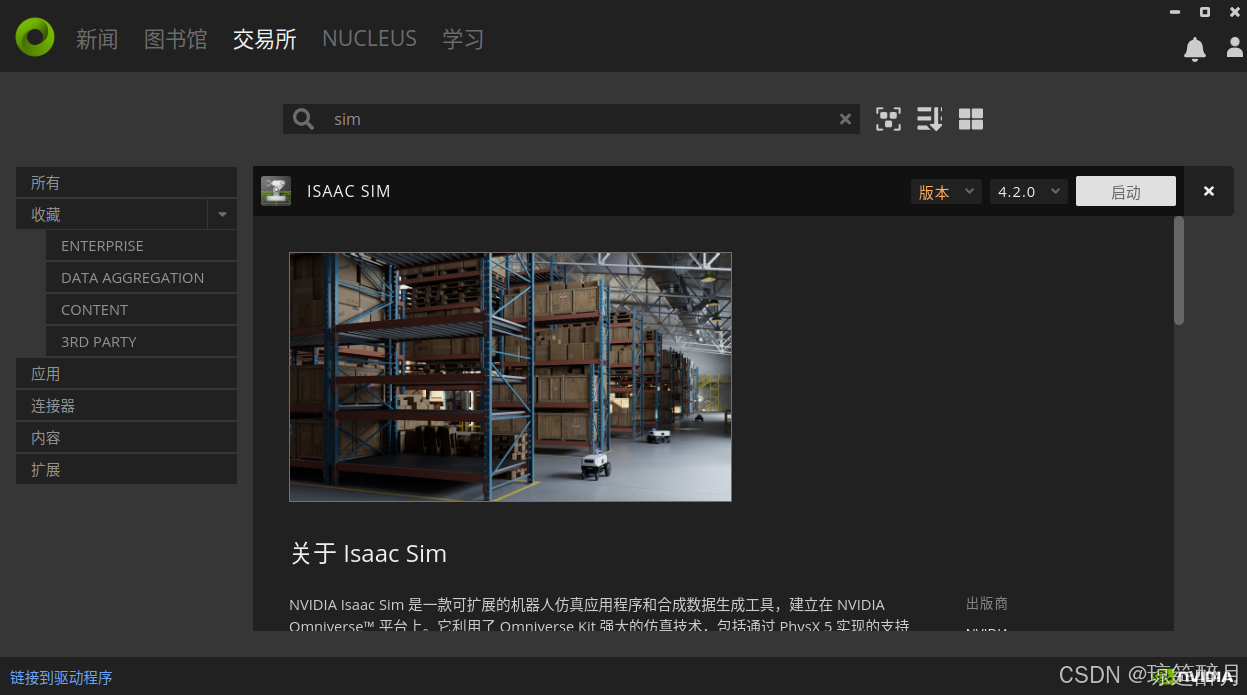 但是受限与网络影响,很大概率下载不动,速度及其缓慢,可尝试方法二
但是受限与网络影响,很大概率下载不动,速度及其缓慢,可尝试方法二
方法二:
-
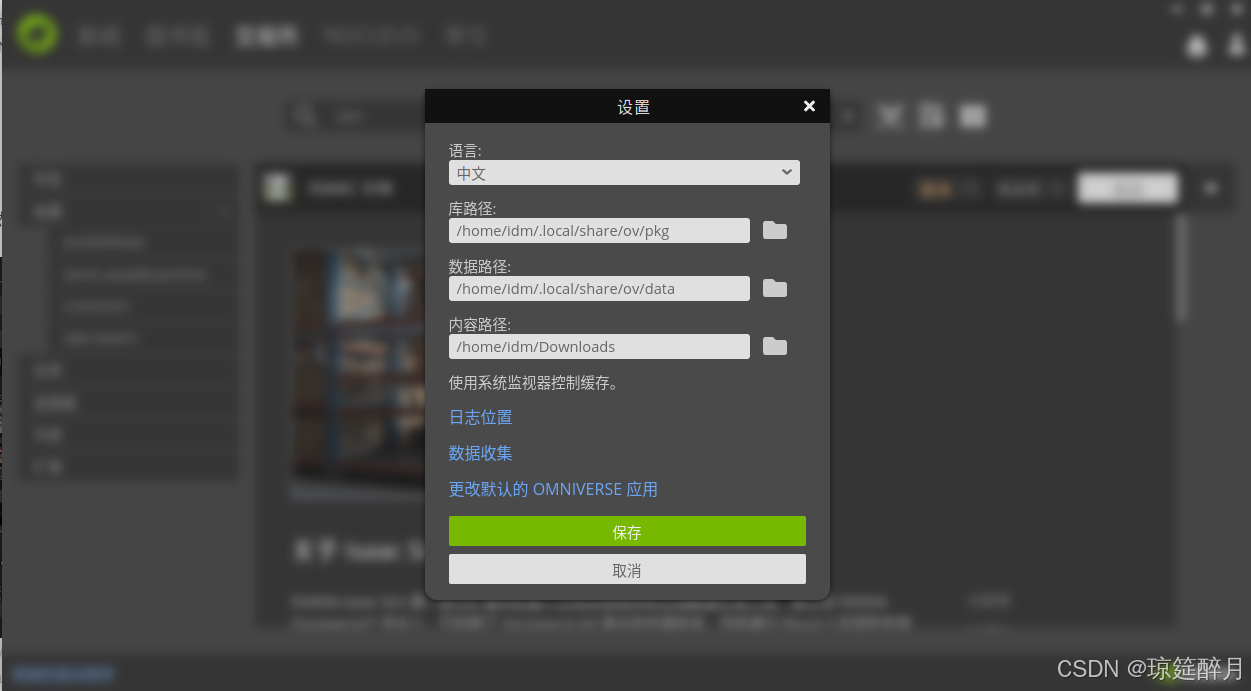
下查看下配置环境的目录:
-
按照方法一操作下,先点击
安装再点击取消. -
打开步骤1中的日志位置,找到
launcher.log文件,然后找到最新的log记录,会出现大概这样一行:
[2024-10-23 11:26:59.183] [debug] [9974c97a-bb3d-45ed-a476-0a46611dba69] Save https://asset.launcher.omniverse.nvidia.com/isaac-sim/4.2.0/linux-x86_64/package.zip?Expires=1729697218&Policy=eyJTdGF0ZW1lbnQiOlt7IlJlc291cmNlIjoiaHR0cHM6Ly9hc3NldC5sYXVuY2hlci5vbW5pdmVyc2UubnZpZGlhLmNvbS9pc2FhYy1zaW0vNC4yLjAvbGludXgteDg2XzY0L3BhY2thZ2UuemlwIiwiQ29uZGl0aW9uIjp7IkRhdGVMZXNzVGhhbiI6eyJBV1M6RXBvY2hUaW1lIjoxNzI5Njk3MjE4fX19XX0_&Signature=jzYEC0KlEDov7bJgdQVAnMxdSIsf6SQQvj9PgLSPad87BmIfF73VfoPbTNMsVneNpyMBeM0iE7eiOuGpYpjkE2iHDcD91NneekV12o0l0-9EyoZi~dirg7savZOTaem6Mucmn7Z~NM6JIEnADBazqScvQH5e--3Qt3w7A-A~5Qt5OP~KIhiWX5pWbj2bNYME4KjJhH1bwEsfwiXOEV-AuPF4utMpwgr4pIpLEPiMd2M7wcrLXgBewZzoCTJysDpItEOQHMEQFEWwq9b04ogx7YHCnf8bI6MKCiSmnEqy~64YC4fWL5bgAw6diZigZ-~I9kvjJQv8aVpPBoDvpCI0kg__&Key-Pair-Id=K13PD0MHC2KFRP to /home/idm/.local/share/ov/pkg/isaac-sim-4.2.0/Isaac Sim.zip
这里就是记录了资源的位置,然后复制下,直接粘贴到浏览器中下载即可 -
下载完后是个名字为
package.zip(也可能是其他名字)的包,把这个包放到/home/idm/.local/share/ov/pkg/isaac-sim-4.2.0/Isaac Sim.zip中。 -
完成后,重新回到
方法一的界面,点击安装即可完成安装。
NUCLEUS 配置
- 在
launcher中找到安装NUCLEUS NAVIGATOR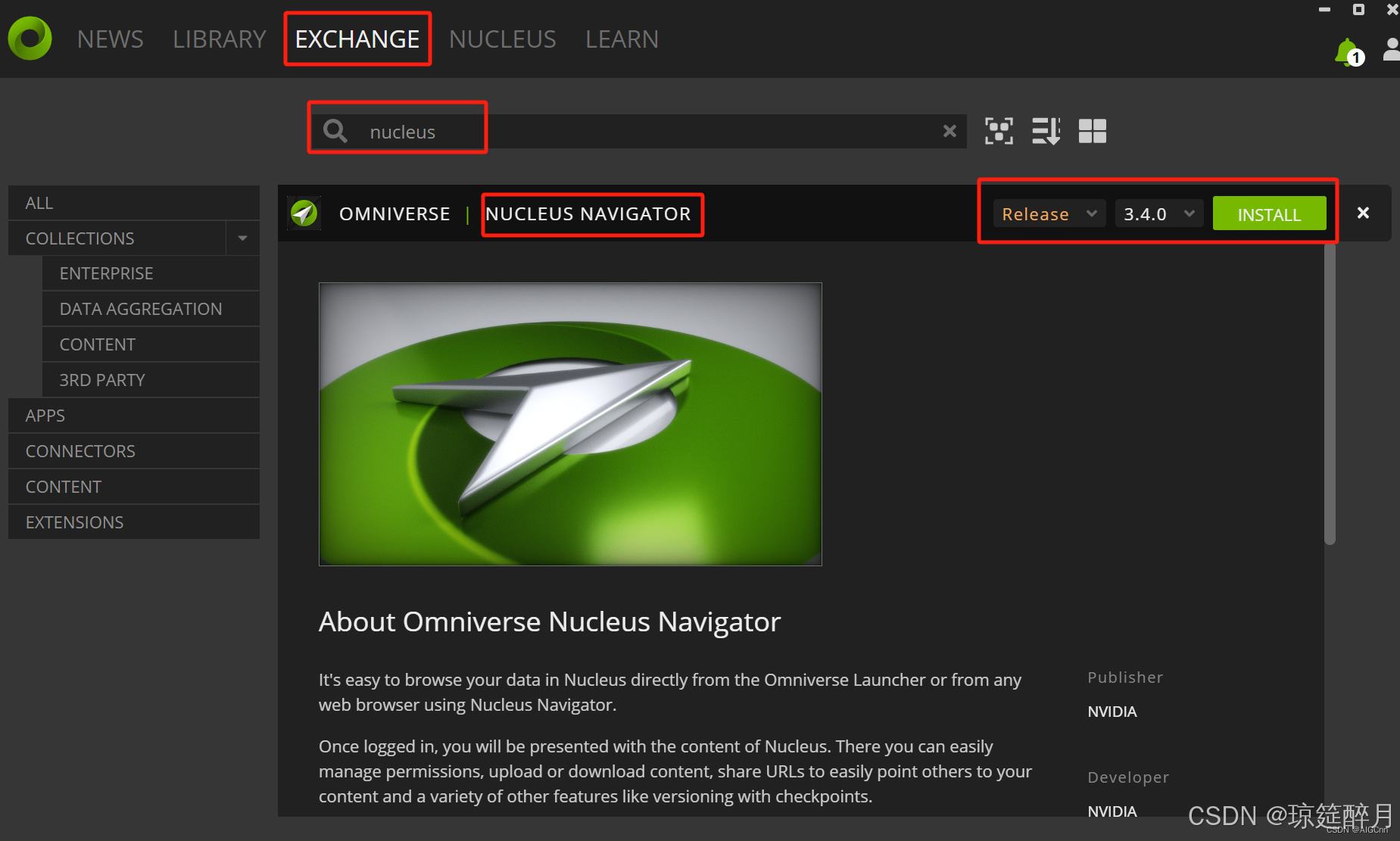
- 创建本地服务
 需要输入用户名和密码;
需要输入用户名和密码; - 下载所需要的资源包

- 还没完成,后续追加
代码运行
Python Env
运行 standalone 的代码时,需要执行 *pkg//isaac-sim-4.1.0/python.sh ,在该脚本中定义了环境变量及设置,这就导致在进行程序开发时增加了不便利性,为了解决这个问题,做以下修改:
- 打开
python.sh脚本; - 将
SCRIPT_DIR变量设置为该文件所在的绝对路径; - 可在任意位置下调用
python.sh脚本
#!/bin/bash
set -e
error_exit()
{
echo "There was an error running python"
exit 1
}
# SCRIPT_DIR="$( cd "$( dirname "${BASH_SOURCE[0]}" )" && pwd )"
SCRIPT_DIR="/home/user/Omniverse/pkg/isaac-sim-4.1.0"
# MY_DIR="$(realpath -s "$SCRIPT_DIR")"
# Setup python env from generated file (generated by tools/repoman/build.py)
export CARB_APP_PATH=$SCRIPT_DIR/kit
export ISAAC_PATH=$SCRIPT_DIR
export EXP_PATH=$SCRIPT_DIR/apps
source ${SCRIPT_DIR}/setup_python_env.sh
# By default use our python, but allow overriding it by checking if PYTHONEXE env var is defined:
python_exe=${PYTHONEXE:-"${SCRIPT_DIR}/kit/python/bin/python3"}
if ! [[ -z "${CONDA_PREFIX}" ]]; then
echo "Warning: running in conda env, please deactivate before executing this script"
echo "If conda is desired please source setup_conda_env.sh in your python 3.10 conda env and run python normally"
fi
# Check if we are running in a docker container
if [ -f /.dockerenv ]; then
# Check for vulkan in docker container
if [[ -f "${SCRIPT_DIR}/vulkan_check.sh" ]]; then
${SCRIPT_DIR}/vulkan_check.sh
fi
fi
# Show icon if not running headless
export RESOURCE_NAME="IsaacSim"
# WAR for missing libcarb.so
export LD_PRELOAD=$SCRIPT_DIR/kit/libcarb.so
$python_exe "$@" $args || error_exit
问题解决
问题1
表象:运行程序,卡死,isaac sim 界面没反映,长时间等待后,会在 terminal 报错
原因:有些 usd 资源是从 NV 的数据库中下载,受限于网络问题,导致卡死
解决方案:
1:多尝试几次,解决网络问题;
2:根据报错信息,定位无法下载的文件,然后复制文件路径,直接粘贴到浏览器中,下载,然后将代码中引用的文件改成本地文件即可;
3:配置 NUCLEUS,下载资源包(大概100G左右),在调用时切换成本地文件。具体操作建第二章。

















 642
642

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









