




 本文介绍了如何在VJC仿真环境中计算机器人走多边形时的转向角度、速度和时间。通过基本几何知识,确定转向角度,如正方形的转向角度90°。公式为角度=3.6vt,时间=(0.25/90)*X,X为转向度数。根据速度V1和时间T1,利用V1T1=V2T2计算不同速度下的转向时间。例如,速度为100时走五角星的时间为0.4,速度为50时则为0.8。这些计算方法适用于不同形状的多边形行走。
本文介绍了如何在VJC仿真环境中计算机器人走多边形时的转向角度、速度和时间。通过基本几何知识,确定转向角度,如正方形的转向角度90°。公式为角度=3.6vt,时间=(0.25/90)*X,X为转向度数。根据速度V1和时间T1,利用V1T1=V2T2计算不同速度下的转向时间。例如,速度为100时走五角星的时间为0.4,速度为50时则为0.8。这些计算方法适用于不同形状的多边形行走。
在vjc仿真机器人中,基础的题目中会有走三角形、正方形、五角星等多边形的题目,我们需要出计算转向的速度时间以达到期望的效果
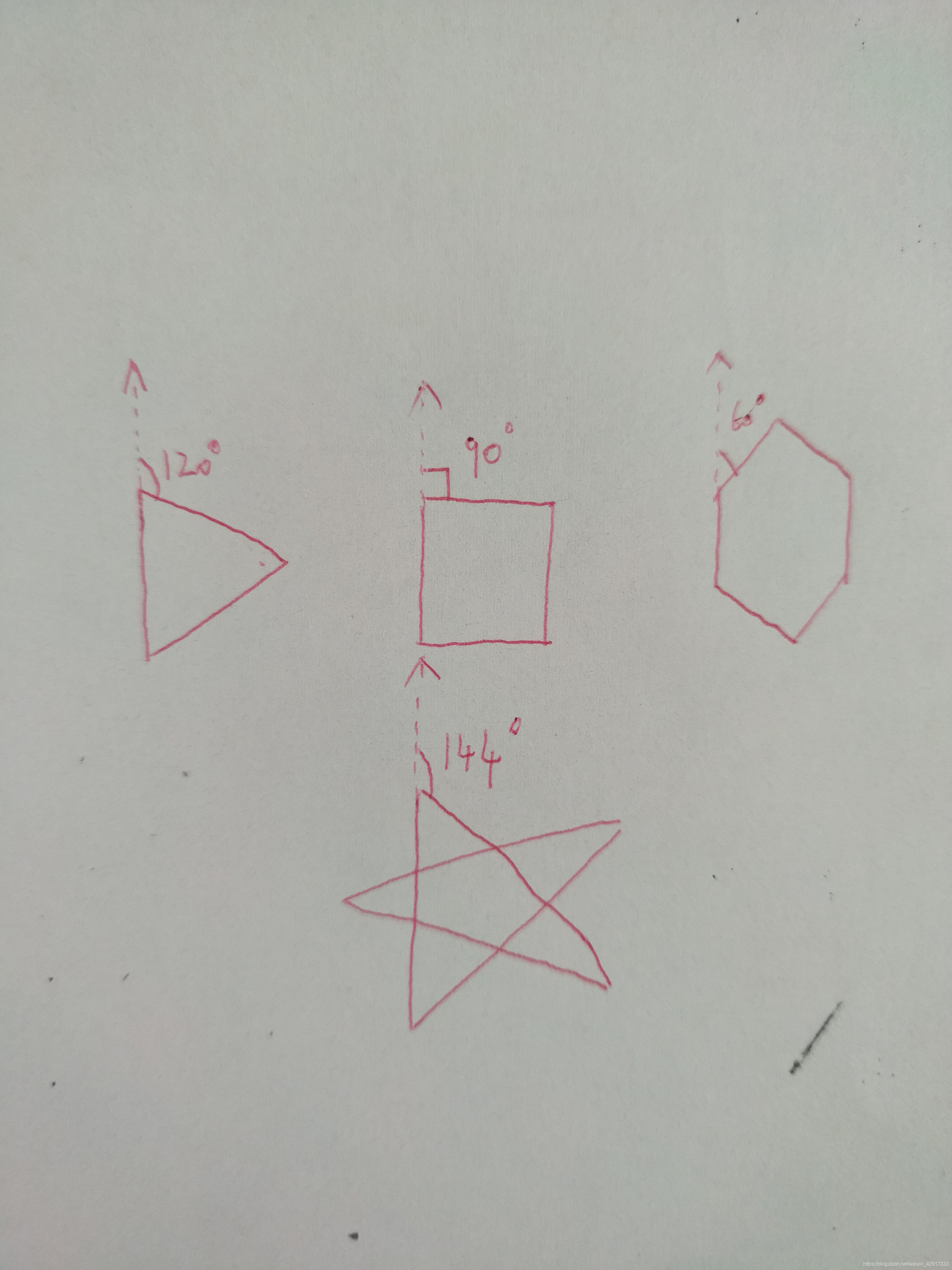
1.计算转向角度
这个要用自己的基本几何知识解决了,例如我画的~
2.设速度为100,计算角度
由于走正方形时转向数据为角度90°,速度:100,时间:0.25,则可以计算转1°的时间=(0.25/90)
则设速度为100,计算其他多边形的时间公式为:(0.25/90)*X(X为转向度数),例如走五角星的数据为速度100,时间为(0.25/90)144=0.4
**补充:角度=3.6vt**例如:90°=3.6100*0.25
3.设速度为N,计算角度
我们有了以100为基础计算出的速度、时间后,那么现在我们将转向速度设置为我们需要的速度计算就很简单了,公式:V1T1=V2T2,即假设转向速度设置为50走五角星,那么它的时间就应该设置为0.8;以50的速度走正方形,时间就设置为0.5
4.常用的数据
| 图形 | 转向角度 | 速度 | 时间 |
|---|---|---|---|
| 三角形 | 120° | 100 | 0.33 |
| 正方形 | 90° | 100 | 0.25 |
| 五角星 | 144° | 100 | 0.4 |
| 正六边形 | 60° | 100 | 0.167 |


















 5185
5185

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









