






需要把实验室的两台UR3e拼成一个双臂机器人一起做控制。之前从一个双臂开源项目中得到了双UR10的moveit!功能包,经过修改,能够在Gazebo中对双UR3e机器人进行路径规划和控制仿真。但在应用到实际机器人中的时候遇到了各种困难。
机械臂驱动:UR3e需要使用最新的ur_robot_driver驱动,而开源项目中使用了ur_modern_driver驱动,这导致需要自己搭建双机械臂驱动。这需要对ros_control有更好的理解。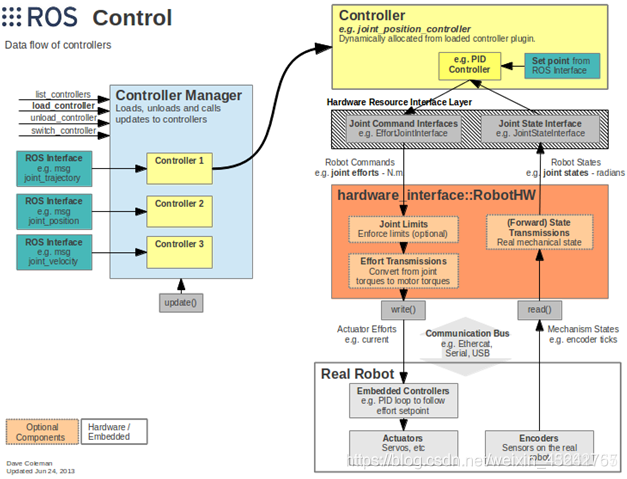 根据原有的ur3e_bringup.launch进行修改,使用两个节点分别控制两个机械臂,在创建节点时,曾通过在节点名之前加前缀的方式区分节点(如:left_),经实践后发现这样改会遇到很多麻烦。
根据原有的ur3e_bringup.launch进行修改,使用两个节点分别控制两个机械臂,在创建节点时,曾通过在节点名之前加前缀的方式区分节点(如:left_),经实践后发现这样改会遇到很多麻烦。
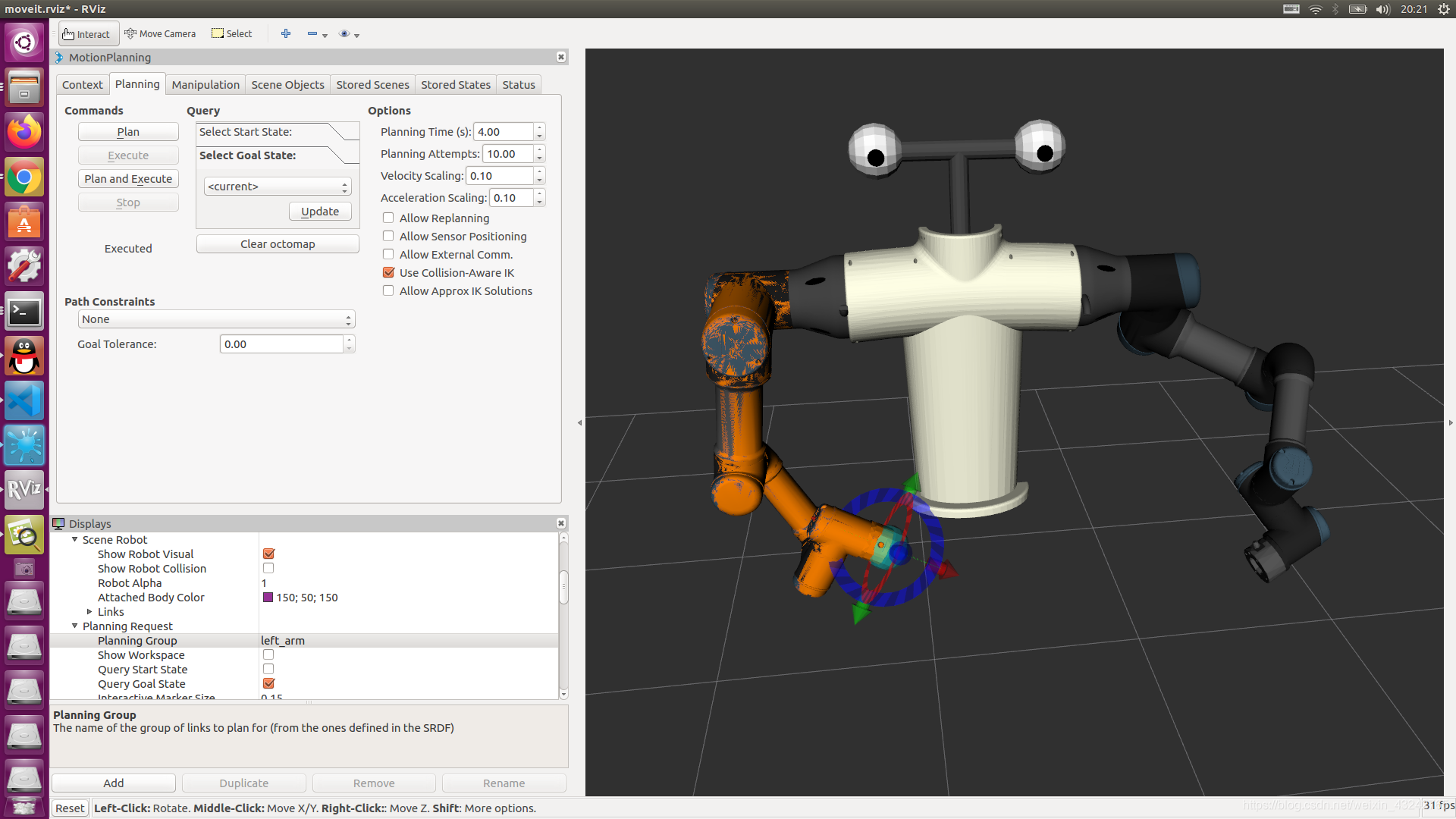
然后,建立双机械臂的URDF模型,这一步在之前用gazebo仿真的时候已经完成,过程基本类似。
另外,需要修改ur3e_controllers.yaml。我在这一步困了两周,尝试了很多种方式,最后找到了一种解决方法。分别编写两个yaml(如:left_controller.yaml和right_controller.yaml),以其中一个为例:
left_arm: # 在整个文件前写上机器人名称,可以给下面所有定义的控制器加上类名
# Settings for ros_control control loop
hardware_control_loop:
loop_hz: &loop_hz 500
# Settings for ros_control hardware interface
#left_ur_hardware_interface:
ur_hardware_interface: # 程序会在URDF中寻找同名的关节,因此需要在每个关节前加上前缀
joints: &robot_joints
- left_shoulder_pan_joint
- left_shoulder_lift_joint
- left_elbow_joint
- left_wrist_1_joint
- left_wrist_2_joint
- left_wrist_3_joint
# Publish all joint states ----------------------------------
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: *loop_hz
# Publish wrench ----------------------------------
force_torque_sensor_controller:
type: force_torque_sensor_controller/ForceTorqueSensorController
publish_rate: *loop_hz
# Publish speed_scaling factor
speed_scaling_state_controller:
type: ur_controllers/SpeedScalingStateController
publish_rate: *loop_hz
# Joint Trajectory Controller - position based -------------------------------
# For detailed explanations of parameter see http://wiki.ros.org/joint_trajectory_controller
scaled_pos_joint_traj_controller:
type: position_controllers/ScaledJointTrajectoryController
joints: *robot_joints
constraints:
goal_time: 0.6
stopped_velocity_tolerance: 0.05
left_shoulder_pan_joint: {trajectory: 0.2, goal: 0.1}
left_shoulder_lift_joint: {trajectory: 0.2, goal: 0.1}
left_elbow_joint: {trajectory: 0.2, goal: 0.1}
left_wrist_1_joint: {trajectory: 0.2, goal: 0.1}
left_wrist_2_joint: {trajectory: 0.2, goal: 0.1}
left_wrist_3_joint: {trajectory: 0.2, goal: 0.1}
stop_trajectory_duration: 0.5
state_publish_rate: *loop_hz
action_monitor_rate: 20
pos_joint_traj_controller:
type: position_controllers/JointTrajectoryController
joints: *robot_joints
constraints:
goal_time: 0.6
stopped_velocity_tolerance: 0.05
left_shoulder_pan_joint: {trajectory: 0.2, goal: 0.1}
left_shoulder_lift_joint: {trajectory: 0.2, goal: 0.1}
left_elbow_joint: {trajectory: 0.2, goal: 0.1}
left_wrist_1_joint: {trajectory: 0.2, goal: 0.1}
left_wrist_2_joint: {trajectory: 0.2, goal: 0.1}
left_wrist_3_joint: {trajectory: 0.2, goal: 0.1}
stop_trajectory_duration: 0.5
state_publish_rate: *loop_hz
action_monitor_rate: 20
scaled_vel_joint_traj_controller:
type: velocity_controllers/ScaledJointTrajectoryController
joints: *robot_joints
constraints:
goal_time: 0.6
stopped_velocity_tolerance: 0.05
left_shoulder_pan_joint: {trajectory: 0.1, goal: 0.1}
left_shoulder_lift_joint: {trajectory: 0.1, goal: 0.1}
left_elbow_joint: {trajectory: 0.1, goal: 0.1}
left_wrist_1_joint: {trajectory: 0.1, goal: 0.1}
left_wrist_2_joint: {trajectory: 0.1, goal: 0.1}
left_wrist_3_joint: {trajectory: 0.1, goal: 0.1}
gains:
#!!These values have not been optimized!!
left_shoulder_pan_joint: {p: 5.0, i: 0.05, d: 0.1, i_clamp: 1}
left_shoulder_lift_joint: {p: 5.0, i: 0.05, d: 0.1, i_clamp: 1}
left_elbow_joint: {p: 5.0, i: 0.05, d: 0.1, i_clamp: 1}
left_wrist_1_joint: {p: 5.0, i: 0.05, d: 0.1, i_clamp: 1}
left_wrist_2_joint: {p: 5.0, i: 0.05, d: 0.1, i_clamp: 1}
left_wrist_3_joint: {p: 5.0, i: 0.05, d: 0.1, i_clamp: 1}
# Use a feedforward term to reduce the size of PID gains
velocity_ff:
left_shoulder_pan_joint: 1.0
left_shoulder_lift_joint: 1.0
left_elbow_joint: 1.0
left_wrist_1_joint: 1.0
left_wrist_2_joint: 1.0
left_wrist_3_joint: 1.0
stop_trajectory_duration: 0.5
state_publish_rate: *loop_hz
action_monitor_rate: 20
vel_joint_traj_controller:
type: velocity_controllers/JointTrajectoryController
joints: *robot_joints
constraints:
goal_time: 0.6
stopped_velocity_tolerance: 0.05
left_shoulder_pan_joint: {trajectory: 0.1, goal: 0.1}
left_shoulder_lift_joint: {trajectory: 0.1, goal: 0.1}
left_elbow_joint: {trajectory: 0.1, goal: 0.1}
left_wrist_1_joint: {trajectory: 0.1, goal: 0.1}
left_wrist_2_joint: {trajectory: 0.1, goal: 0.1}
left_wrist_3_joint: {trajectory: 0.1, goal: 0.1}
gains:
#!!These values have not been optimized!!
left_shoulder_pan_joint: {p: 5.0, i: 0.05, d: 0.1, i_clamp: 1}
left_shoulder_lift_joint: {p: 5.0, i: 0.05, d: 0.1, i_clamp: 1}
left_elbow_joint: {p: 5.0, i: 0.05, d: 0.1, i_clamp: 1}
left_wrist_1_joint: {p: 5.0, i: 0.05, d: 0.1, i_clamp: 1}
left_wrist_2_joint: {p: 5.0, i: 0.05, d: 0.1, i_clamp: 1}
left_wrist_3_joint: {p: 5.0, i: 0.05, d: 0.1, i_clamp: 1}
# Use a feedforward term to reduce the size of PID gains
velocity_ff:
left_shoulder_pan_joint: 1.0
left_shoulder_lift_joint: 1.0
left_elbow_joint: 1.0
left_wrist_1_joint: 1.0
left_wrist_2_joint: 1.0
left_wrist_3_joint: 1.0
stop_trajectory_duration: 0.5
state_publish_rate: *loop_hz
action_monitor_rate: 20
# Pass an array of joint velocities directly to the joints
joint_group_vel_controller:
type: velocity_controllers/JointGroupVelocityController
joints: *robot_joints
robot_status_controller:
type: industrial_robot_status_controller/IndustrialRobotStatusController
handle_name: industrial_robot_status_handle
publish_rate: 10
这样在运行bringup之后可以得到类名相同的两组param和node
NODES
/left_arm/
controller_stopper (controller_stopper/node)
ros_control_controller_spawner (controller_manager/spawner)
ros_control_stopped_spawner (controller_manager/spawner)
ur_hardware_interface (ur_robot_driver/ur_robot_driver_node)
ur_robot_state_helper (ur_robot_driver/robot_state_helper)
/right_arm/
controller_stopper (controller_stopper/node)
ros_control_controller_spawner (controller_manager/spawner)
ros_control_stopped_spawner (controller_manager/spawner)
ur_hardware_interface (ur_robot_driver/ur_robot_driver_node)
ur_robot_state_helper (ur_robot_driver/robot_state_helper)
/
joint_state_publisher (joint_state_publisher/joint_state_publisher)
robot_state_publisher (robot_state_publisher/robot_state_publisher)
还遇到了controller的名字不一样的问题。需要保证server端和client端的名称保持一致(具体一下哪边是client哪边是server)
参考:https://blog.csdn.net/ha010/article/details/109274459
https://blog.csdn.net/qq_50598558/article/details/114702163
另外出现了WARN:Controller Spawner couldn’t find the expected controller_manager ROS interface.的问题,这是因为前面提到的命名空间不统一的问题。
参考:https://blog.csdn.net/CCsLife/article/details/106086854
目前的情况是,打开bringup和moveit没有问题,执行路径规划也没有问题,但是无法执行,控制真是机械臂。
报错如下:Controller right_arm/scaled_pos_joint_traj_controller failed with error code PATH_TOLERANCE_VIOLATED
这个问题还未解决。
3月31日,问题解决了!
PATH_TOLERANCE_VIOLATED问题出现之后的某天突然想到,rviz中的机器人模型并没有和实际机器人同步,还是最开始的那个姿势,所以一定是joint_states出现了问题。
查看joint_states的话题内容,发现都是0,难怪会出现超过约束的问题。
查看joint_states的info,发现根本没有发布者,只有订阅者。
查看目前的双臂驱动rqt_graph:

和能正常使用的单机械臂驱动的rqt_graph比较之后发现了两个问题:
(1)驱动节点有一些不一样的地方,应该是这样:

这个问题出在了bringup的最后:
注释中提示
Make sure to start this in the namespace of the hardware interface
而我并没有把该节点在ur_hardware_interface命名空间中,应修改为:
<!-- Make sure to start this in the namespace of the hardware interface -->
<node ns="right_arm/ur_hardware_interface" name="ur_robot_state_helper" pkg="ur_robot_driver" type="robot_state_helper" respawn="false" output="screen">
</node>
<!-- Make sure to start this in the namespace of the hardware interface -->
<node ns="left_arm/ur_hardware_interface" name="ur_robot_state_helper" pkg="ur_robot_driver" type="robot_state_helper" respawn="false" output="screen">
</node>
修改之后,仍然没有joint_states
查看rostopic list,发现原来是节点发布的话题多了一个类名!

马上加上remap
<remap from="/left_arm/joint_states" to="/joint_states"/>
大功告成!

折磨了我近一个月的双臂驱动终于完成了。














 1253
1253











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









