








今天又把linux之前变异的文件重新编译,因为手贱,把linux里面的很多重要文件删除了,无奈重装linux。谁知道又把vim搞崩溃了,又重新装了一遍。后面学习linux的ros需要用到主从linux,就顺便安装了两个。想把之前写的文件直接导进去,发现一只编译不成功,后来重复多次终于找到快速间接简洁方法。
具体如下:
1.新建文件 catkin_ws文件夹(主目录),主目录里面新建子目录src文件夹。
2.src文件夹运行命令:
catkin_init_workspace
初始化工作空间,
3.根目录下运行命令:
catkin_make
编译工作空间
4.把以前写的文件上传到src文件中,我的直接把learning_communication文件复制粘贴到src中就行。
这是我的代码:https://download.csdn.net/download/weixin_43262513/10931519
5.根目录下运行命令:
catkin_make
6.编译成功。
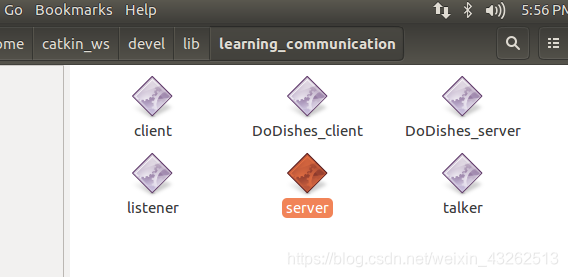
生成可执行文件。















 708
708











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











