







一、Brute-Force(暴力)匹配
首先在第一幅图像选取一个特征点,然后依次与第二个图像中的特征点进行(描述符)距离测试,最后返回距离最近的特征点。
二、对于暴力匹配,首先使用opencv中cv2.BFMatcher()函数进行特征点的匹配,其有两个参数
- 第一个参数normType,用来指定要使用的距离测试类型,默认值为cv2.Norm_L2,很适合用于SIFT 和 SURF算法; 对于二进制描述符的ORB、BRIEF和BRISK算法,则使用cv2.NORM_HAMMING;
- 第二个参数是布尔变量crossCheck,默认值为 False。如果设置为True,匹配条件就会更加严格,只有到 A 中的第 i 个特征点与 B 中的第 j 个特征点距离最近,并且 B 中的第 j 个特征点到 A 中的第 i 个特征点也是最近时才会返回最佳匹配(i,j)
三、BFMatcher 具有两个方法BFMatcher.match() 和 BFMatcher.knnMatch()。
- 第一个方法BFMatcher.match() 会返回最佳匹配。其返回值是一个DMatch对象列表,这个对象列表具有如下属性:
DMatch.distance - 描述符之间的距离,越小越好。
DMatch.trainIdx - 目标图像中描述符的索引。
DMatch.queryIdx - 原图像中描述符的索引。
DMatch.imgIdx - 目标图像的索引。
2. 第二个方法BFMatcher.knnMatch()为每个特征点返回 k 个最佳匹配,(降序排列之后取前 k 个,其中 k 是由用户决定的)。
和cv2.drawKeypoints() 绘制特征点一样,可以使用cv2.drawMatches() 来绘制匹配的点。它会将两幅图像先水平排列,然后在最佳匹配的点之间绘制直线。如果前面使用的是 BFMatcher.knnMatch()方法,则使用函数 cv2.drawMatchsKnn()为每个特征点和它的 k 个最佳匹配点绘制匹配线。如果 k 等于 2,就会为每个特征点点绘制两条最佳匹䫼直线。
四、具体使用SIFT算法进行暴力匹配步骤:
- 首先,利用sift.detectAndCompute()函数找到特征点,计算描述符;
- 其次,创建暴力匹配对象,cv2.BFMatcher();
- 然后,使用Matcher.knnMatch()获得两幅图像的K个最佳匹配;
- 接着,获得的K个最佳匹配中取出来第一个和第二个,进行比值,比值小于0.75,则为好的匹配点;
- 最后,采用cv2.drawMatches()函数,在最佳匹配的点之间绘制直线。
具体代码如下所示:
# -*- coding: utf-8 -*-
import cv2
import numpy as np
from matplotlib import pyplot as plt
img1 = cv2.imread('shu1.jpg', 0)
img2 = cv2.imread('shu2.jpg', 0)
sift = cv2.xfeatures2d.SIFT_create()
kp1, des1 = sift.detectAndCompute(img1,None)#利用sift.detectAndCompute()函数找到特征点,计算描述符;
kp2, des2 = sift.detectAndCompute(img2,None)
bf = cv2.BFMatcher()#创建暴力匹配对象,cv2.BFMatcher();
matches = bf.knnMatch(des1,des2, k=2)#使用Matcher.knnMatch()获得两幅图像的K个最佳匹配;
good = []
for m,n in matches:
if m.distance < 0.75*n.distance: #获得的K个最佳匹配中取出来第一个和第二个,进行比值,比值小于0.75,则为好的匹配点
good.append([m])
img3=np.empty((300,300))
img3 = cv2.drawMatchesKnn(img1,kp1,img2,kp2,good[:50],img3,flags=2) #采用cv2.drawMatchesKnn()函数,在最佳匹配的点之间绘制直线
plt.imshow(img3),plt.show()
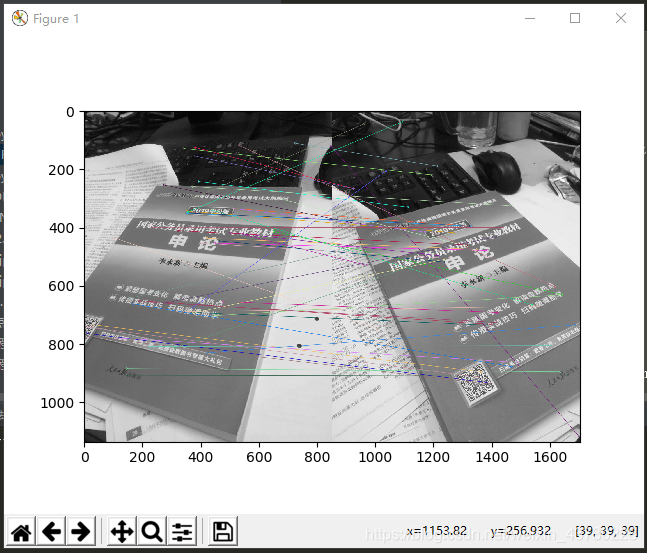
运行结果如下所示:














 65
65











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









