







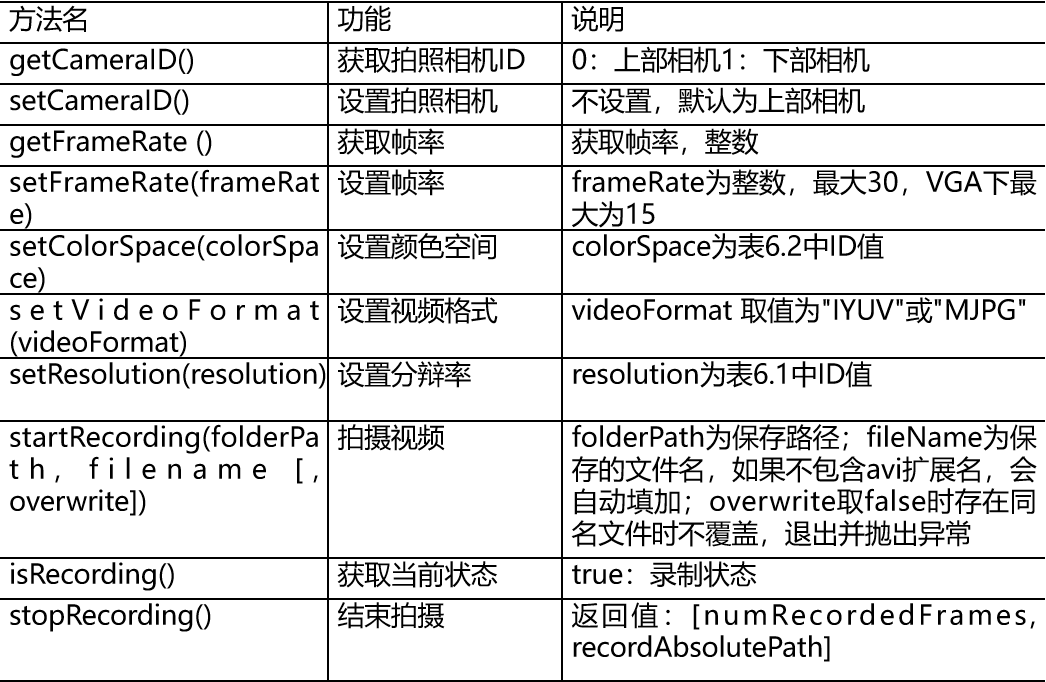
NAO机器人录制视频
参数说明:
编程实现:
利用ALVideoRecorder录制视频
#coding=utf-8
import os
import sys
import time
from naoqi import ALProxy
IP = "192.168.1.170" #将"192.168.1.170"替换成自己机器人IP
PORT = 9559
try:
videoRecorderProxy = ALProxy("ALVideoRecorder", IP, PORT)
except Exception, e:
print "Error when creating ALVideoRecorder proxy:"
print str(e)
exit(1)
videoRecorderProxy.setFrameRate(10.0)
videoRecorderProxy.setResolution(2) # 设置分辩率640*480
videoRecorderProxy.startRecording("/home/nao/recordings/cameras", "test")
print "Video record started."
time.sleep(5) #录制5秒视频
videoInfo = videoRecorderProxy.stopRecording() #返回值为[numRecordedFrames, recordAbsolutePath]
print "Video was saved on the robot: ", videoInfo[1] # /home/nao/recordings/cameras/test.avi
print "Total number of frames: ", videoInfo[0]
拍照
参数说明:
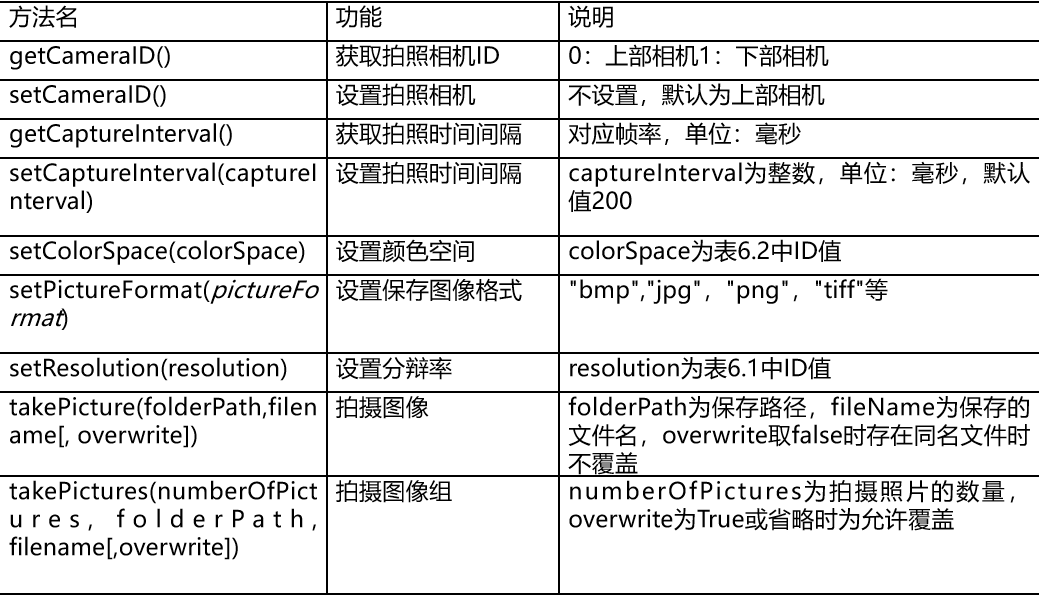
编程实现:
class MyClass(GeneratedClass):
def __init__(self):
GeneratedClass.__init__(self)
self.photo=ALProxy("ALPhotoCapture")
def onLoad(self):
pass
def onUnload(self):
pass
def onInput_onStart(self):
self.photo.setResolution(2)
self.photo.setPictureFormat("jpg")
self.photo.takePictures(3, "/home/nao/recordings/cameras/", "redball")
pass
def onInput_onStop(self):
self.onUnload()
self.onStopped()















 4011
4011











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











