






上位机:Modbuspoll-64Bit,Version 9.5.0,Build 1507
下位机:Robotiq夹爪
通信协议:Modbus RTU
物理连接:RS485转USB线
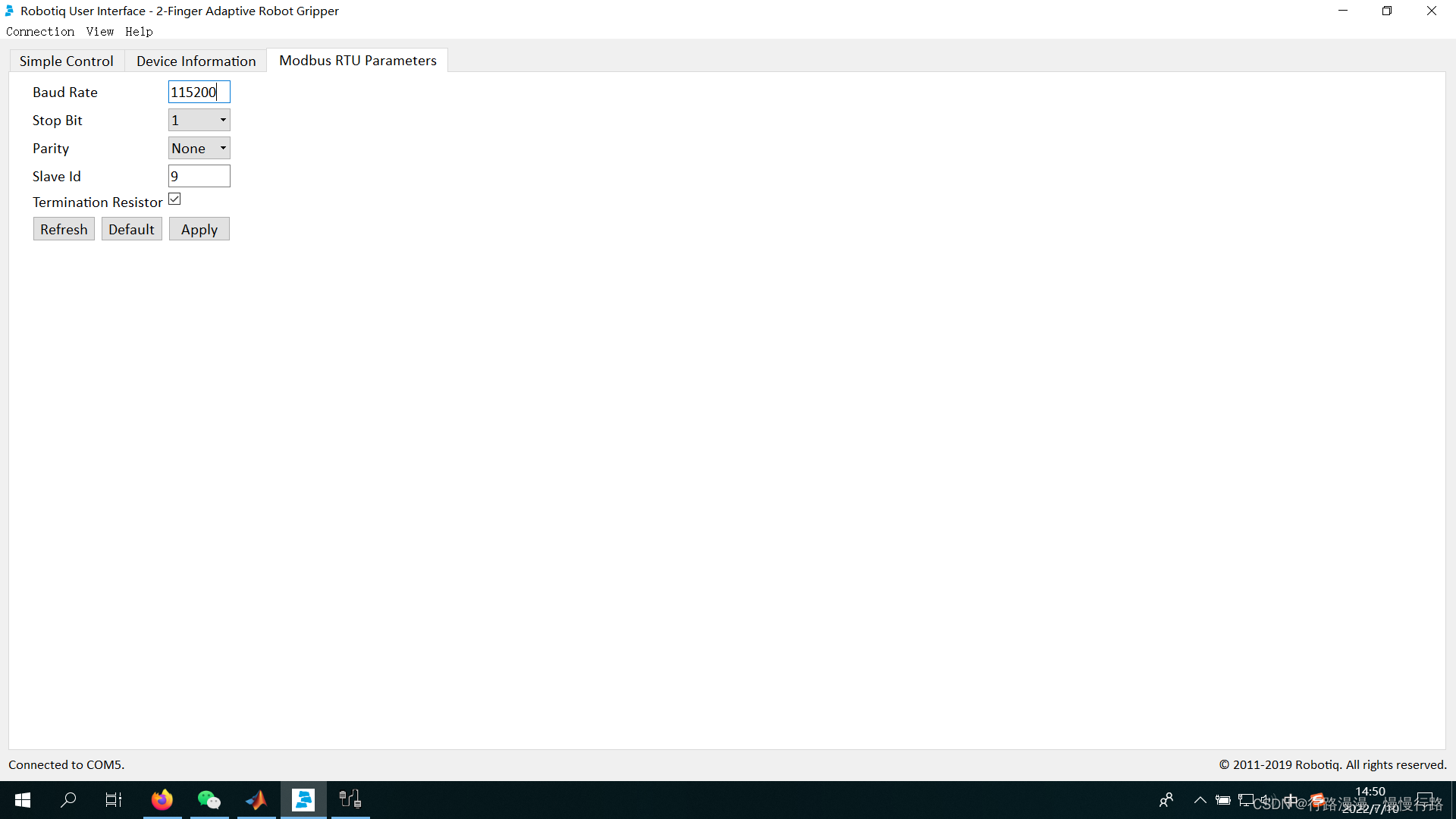
1、首先、我们要打开夹爪原来的上位机软件(Robotiq User Interface)来确定下位机的ModbusRTU参数。
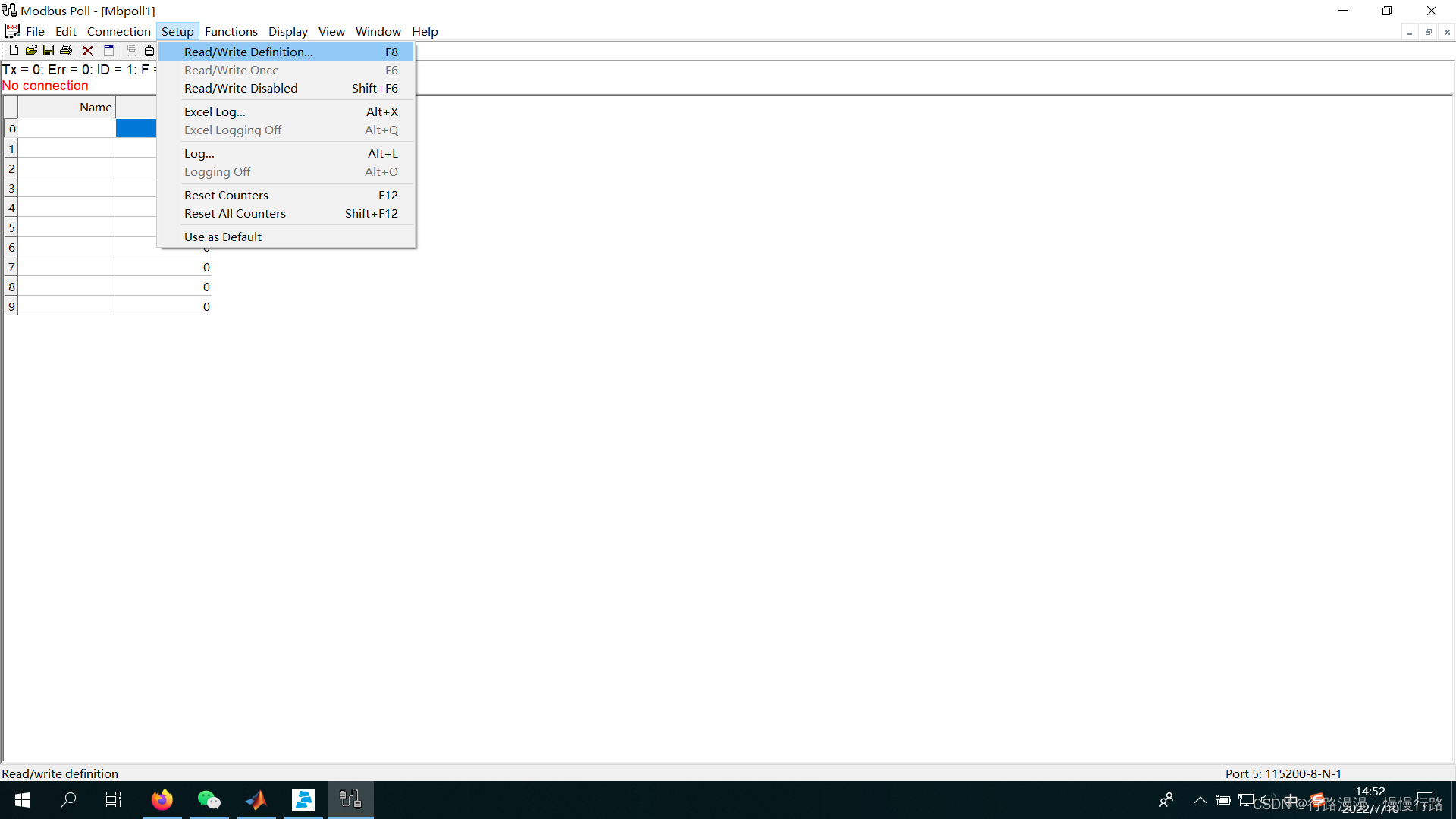
2、然后,我们要在上位机里设置一下Slave ID也就是我们从机夹爪的地址:Setup->Read/Write Definition
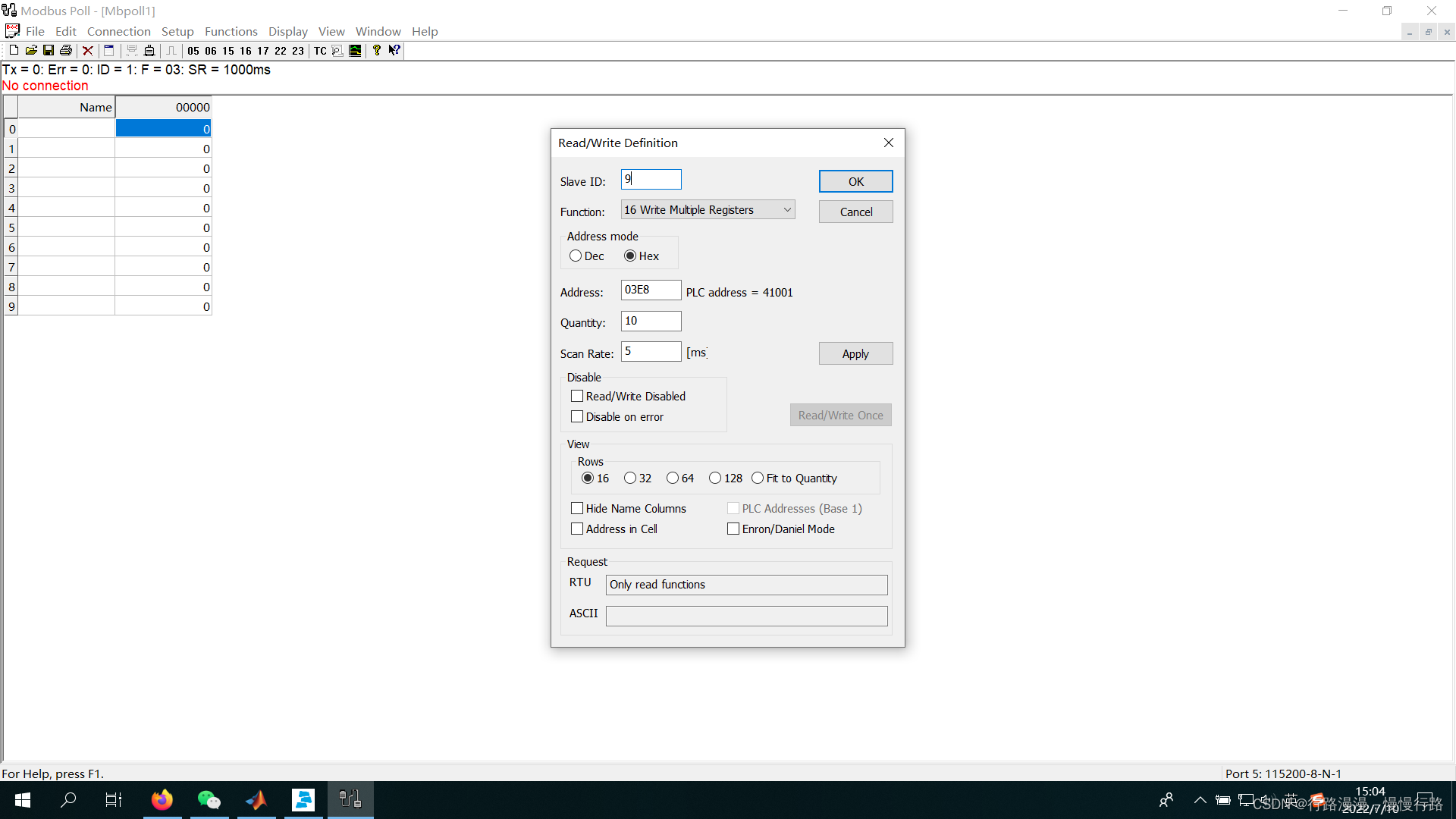
将Slave ID更改成与下位机的地址一致即可:function有多个模式,这里我们只用到了两个一个是03:读取多个寄存器,另一个是16:写多个寄存器;address mode这里建议选择16进制模式即HEX(因为,说明书上给的报文就是16进制的);address这里填的是首个寄存器的地址,按说明书填写即可(我这里是03E8);quantity代表的是操作的寄存器的数量,这个也按需求更改即可;scan rate代表的是扫描率也就是发送速率,我这里设置为5ms,个人建议不要高于10ms,不然的话,指示灯会红蓝交替闪烁。到这里,上位机的环境就基本配置好了。
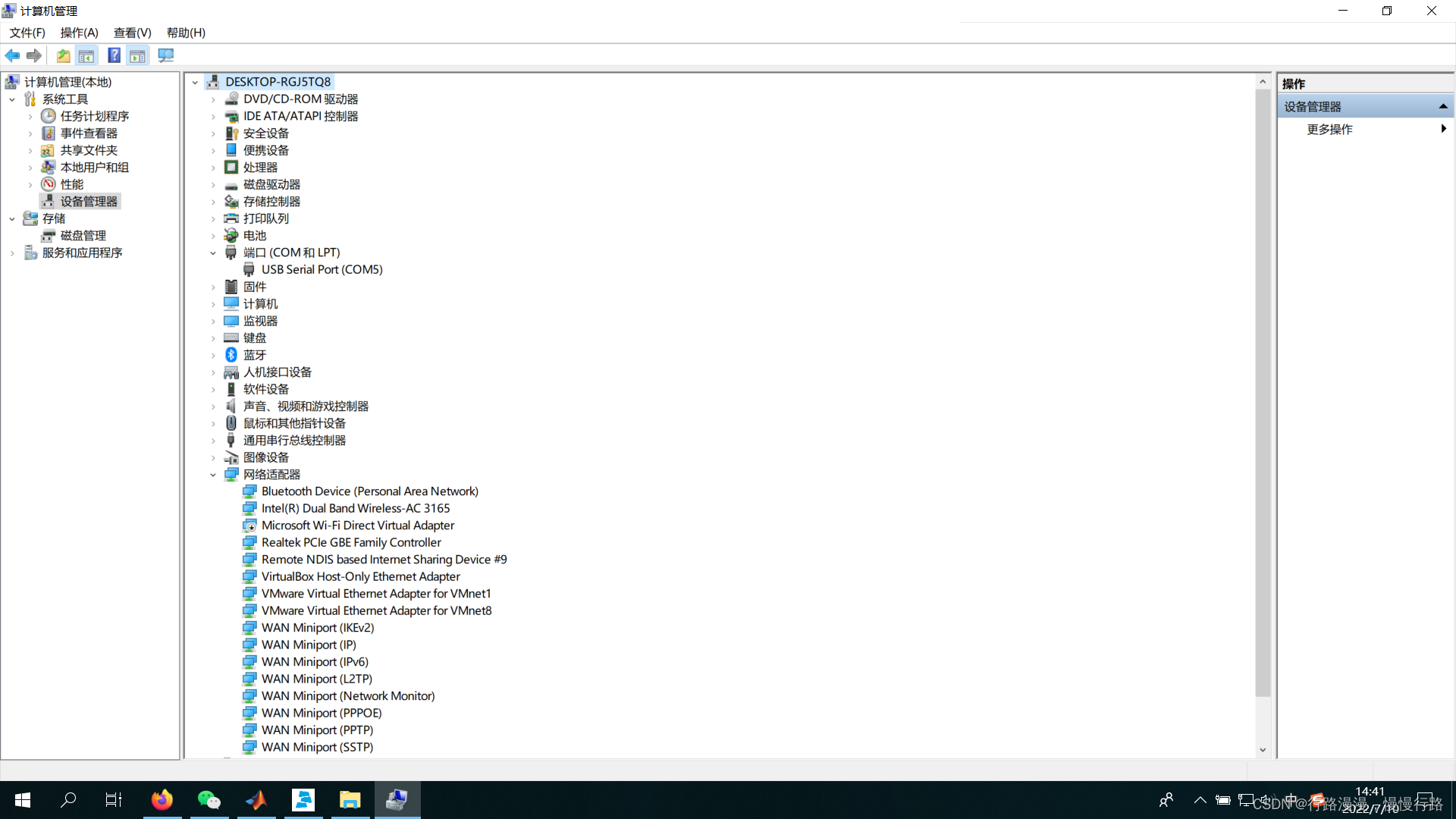
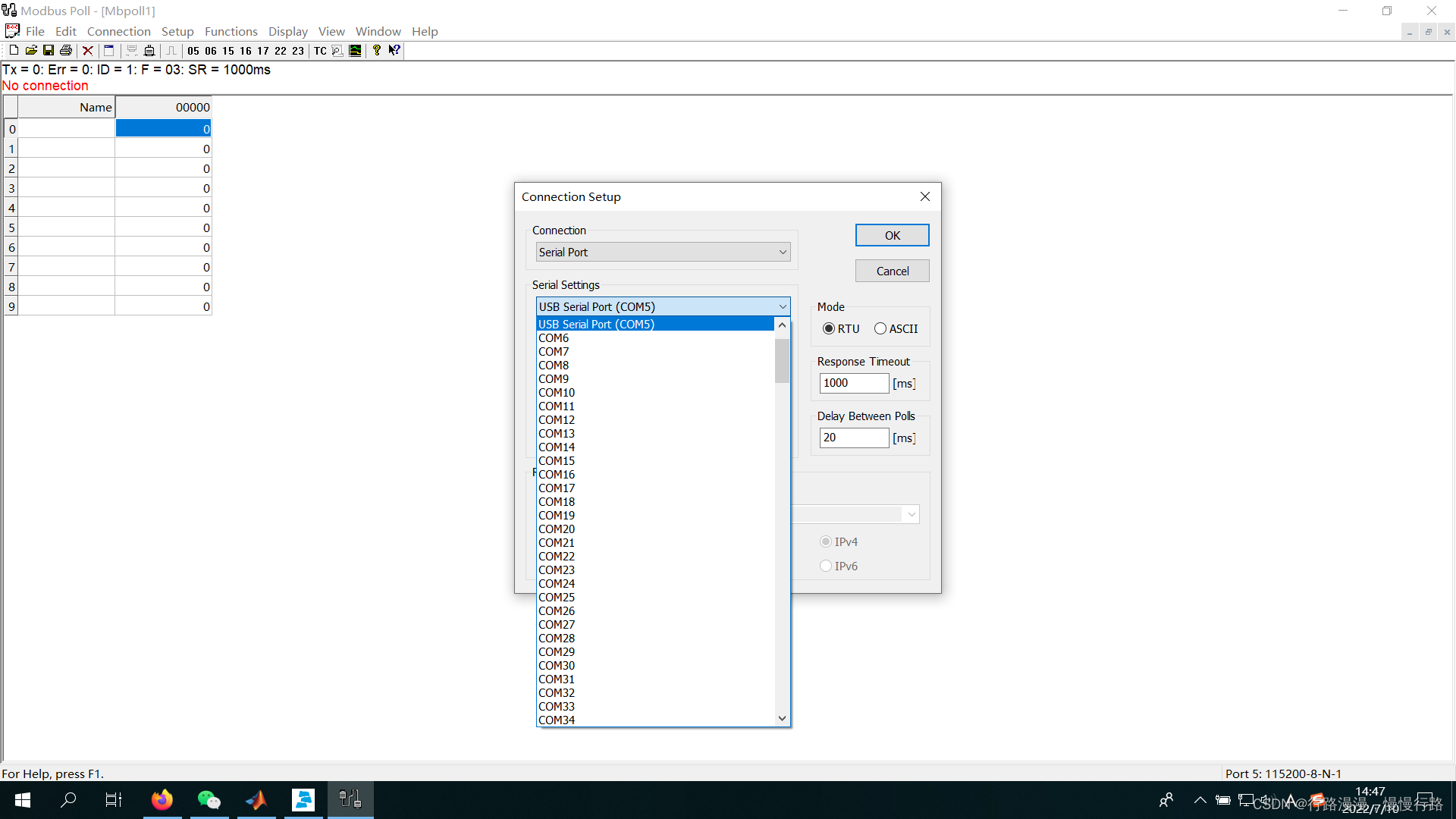
3、接下来就是实现上下位机通信连接了,先找到夹爪连接pc的串口,这里我的串口是COM5
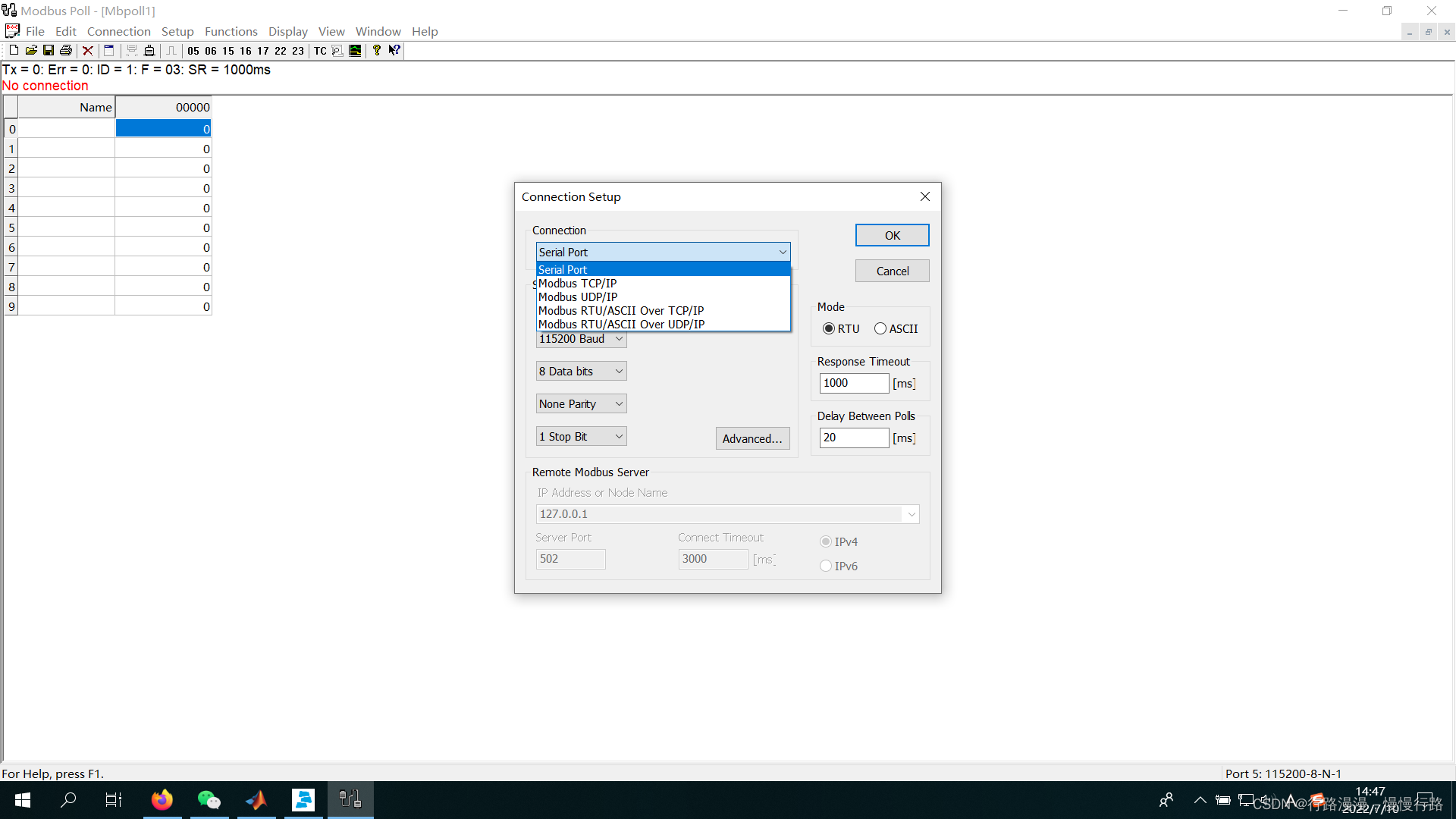
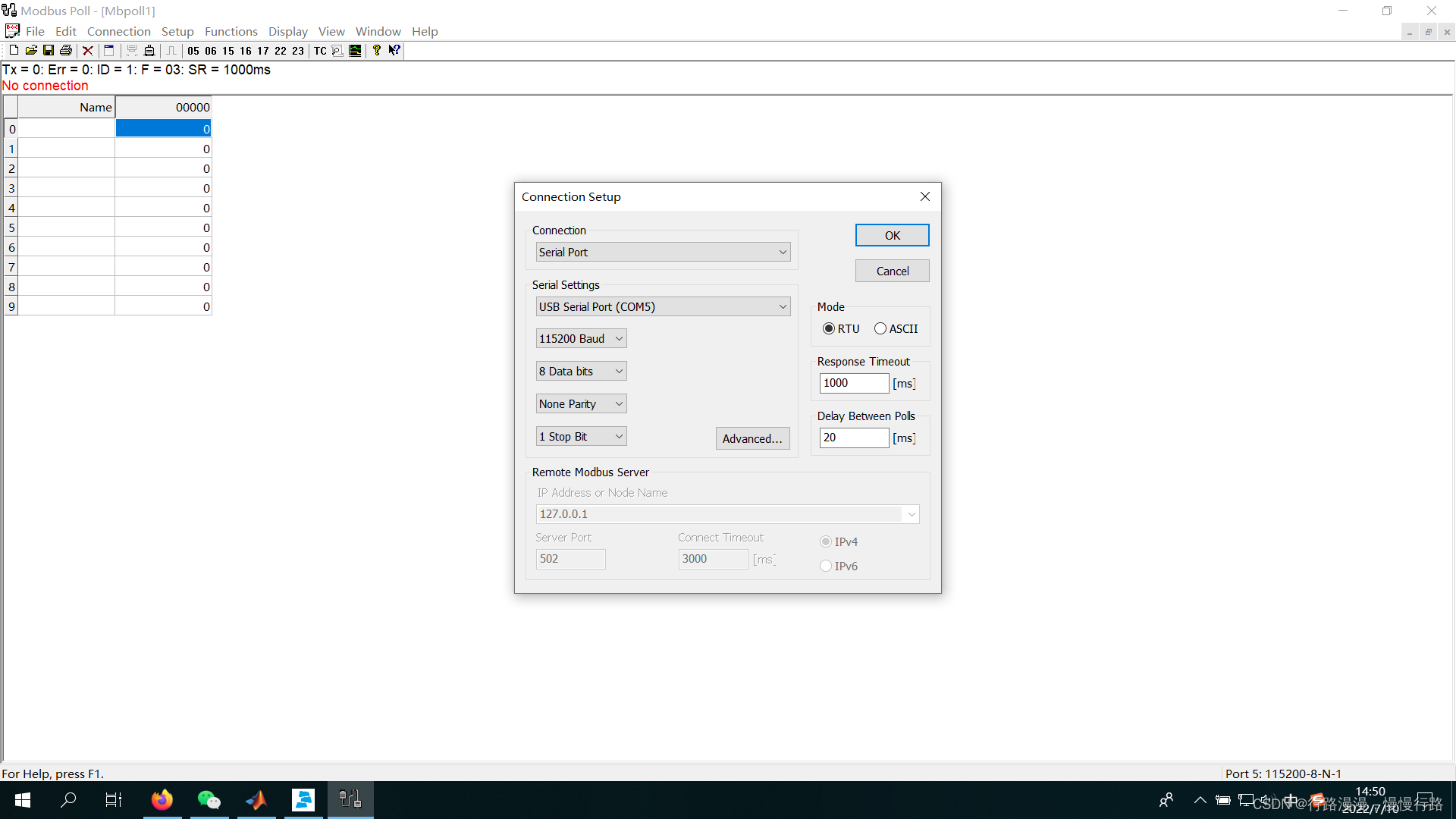
4、打开Modbuspoll-> Connection->Connection Setup->Connection:Serial Port->Serial Settings:这里要选择刚才我们查找到的串口(我的是COM5,所以我选择的是COM5)
 5、打开Robotiq User Interface软件->Modbus RTU Parameters,来保证上下位机的参数是一样的。
5、打开Robotiq User Interface软件->Modbus RTU Parameters,来保证上下位机的参数是一样的。
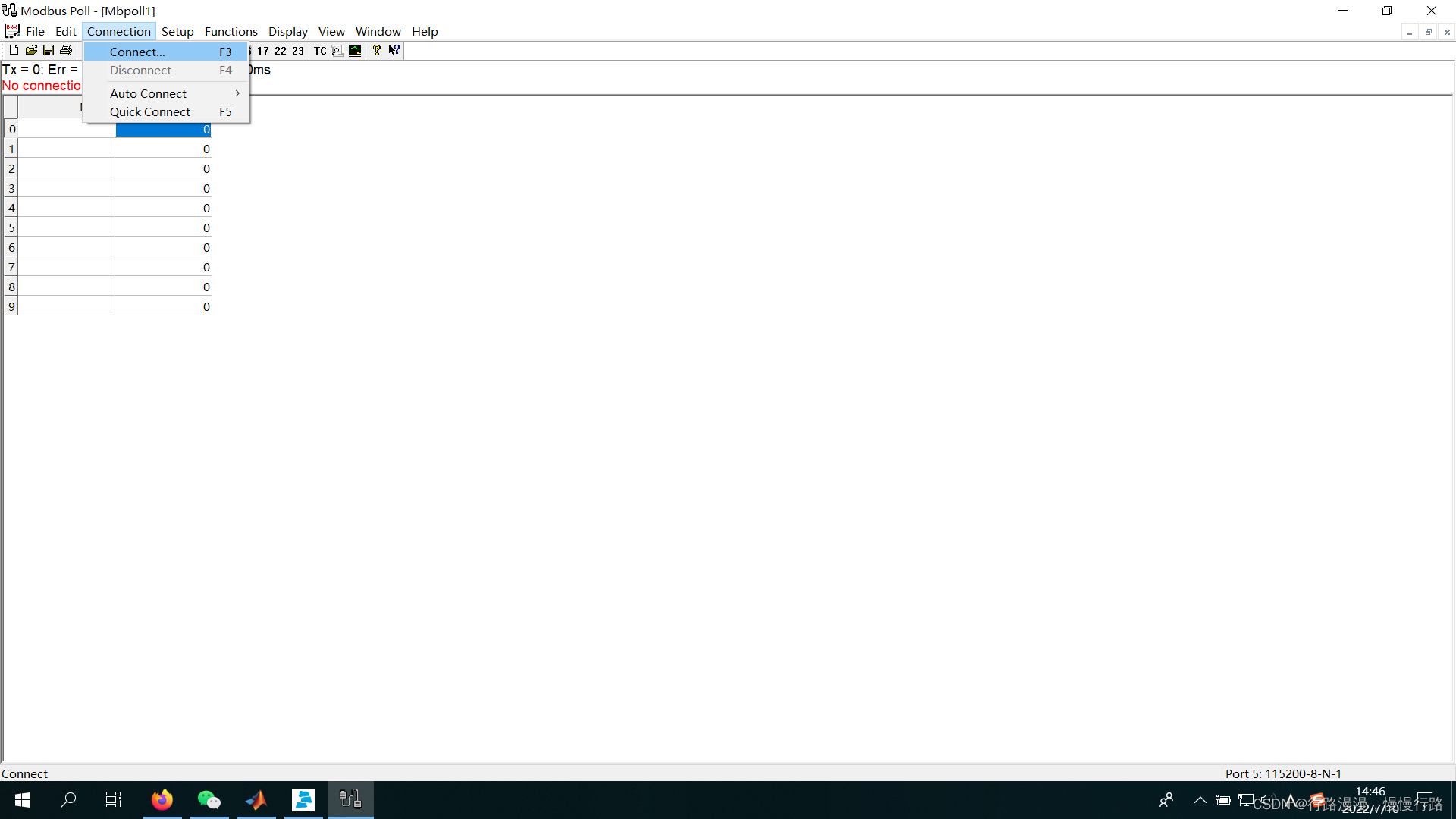
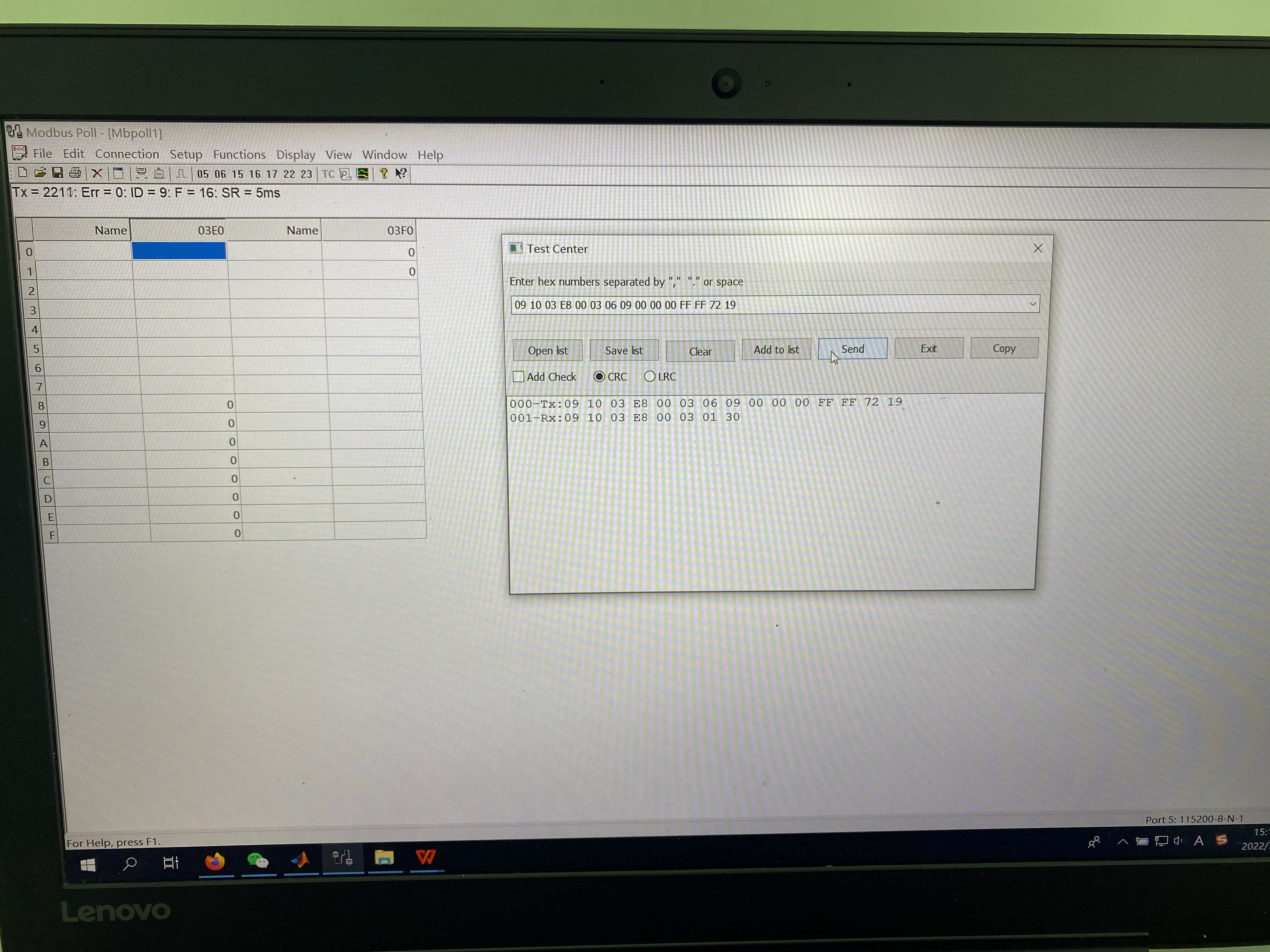
6、做好以上的工作之后,我们就可以向下位机发送报文了:Functions->Test Center->Send即可
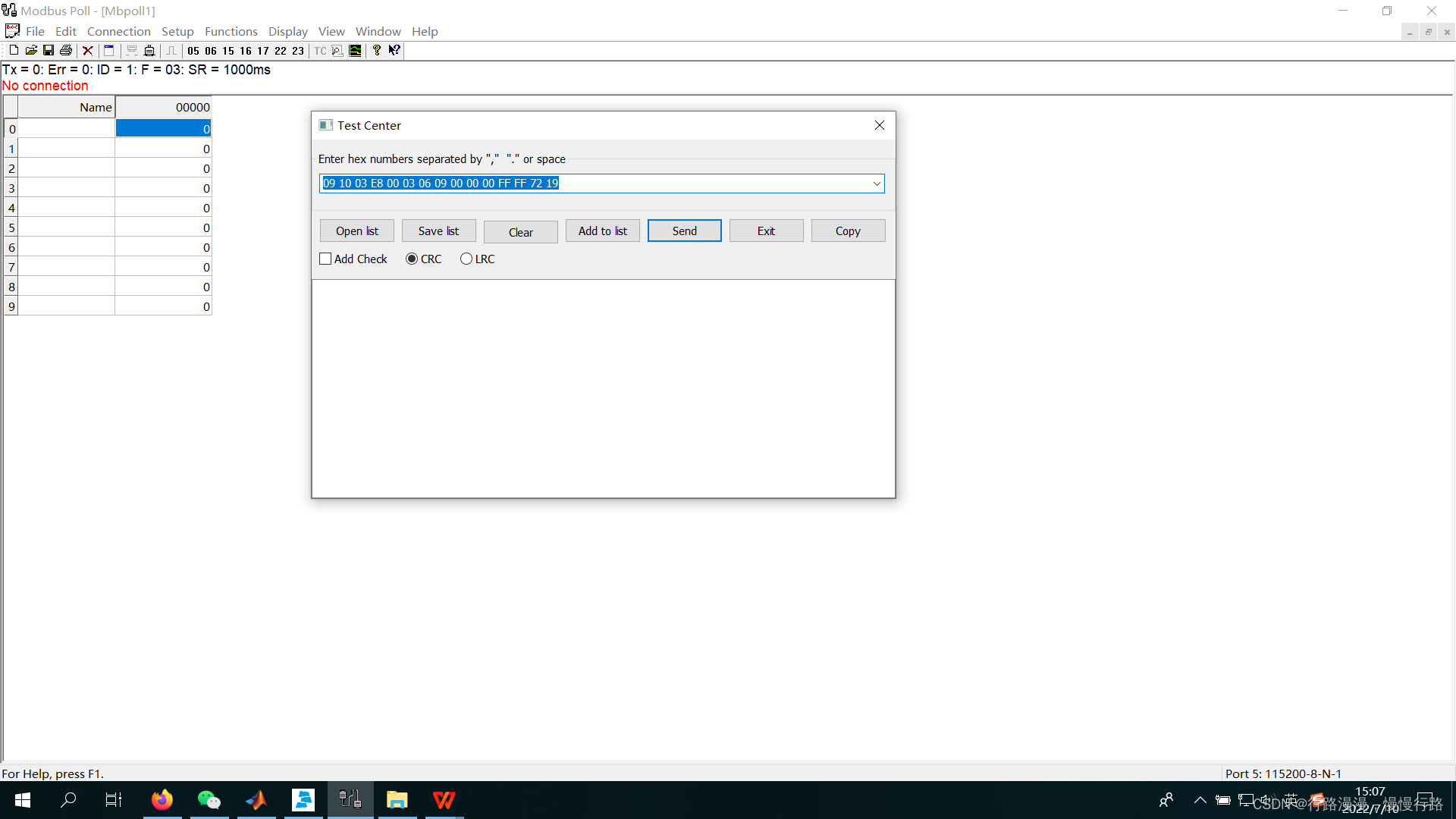
成功后的上位机下位机效果如下图 :















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









