







一、一维牛顿法
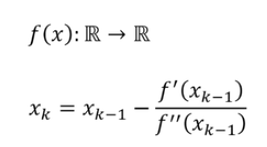
一元目标函数
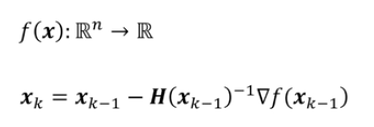
多元目标函数
一元-多元的映射关系
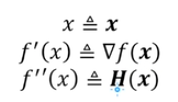
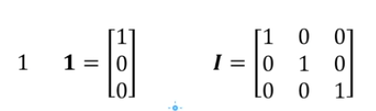
1从标量映射到向量到矩阵
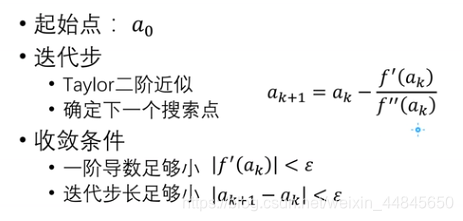
 一维:
一维:
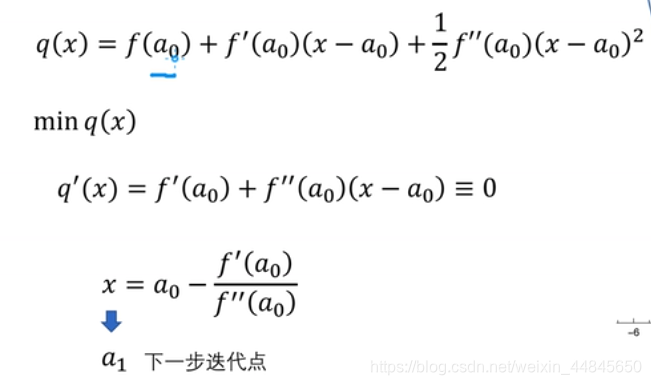
算法流程:
多元函数的泰勒展开
 求q(x)下降的最小值的一阶必要条件,表示梯度的每个分量都为0
求q(x)下降的最小值的一阶必要条件,表示梯度的每个分量都为0

两边同乘Hession矩阵的逆,可得:
 牛顿法特点:
牛顿法特点:
1、计算量较大,需要求一阶导数、二阶导数
2、步长趋势变化不稳定,如果二阶导数很小的话,步长会很大。
3、搜索过程并不总是趋近于极小点,也有可能收敛到极大点,与目标相反。
一、一维牛顿法
一元目标函数
多元目标函数
一元-多元的映射关系
1从标量映射到向量到矩阵
一维:
算法流程:
多元函数的泰勒展开
求q(x)下降的最小值的一阶必要条件,表示梯度的每个分量都为0
两边同乘Hession矩阵的逆,可得:
牛顿法特点:
1、计算量较大,需要求一阶导数、二阶导数
2、步长趋势变化不稳定,如果二阶导数很小的话,步长会很大。
3、搜索过程并不总是趋近于极小点,也有可能收敛到极大点,与目标相反。
 1067
1067











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言























