







1.前言
GTSAM:开源因子图优化库GitHub - borglab/gtsam: GTSAM is a library of C++ classes that implement smoothing and mapping (SAM) in robotics and vision, using factor graphs and Bayes networks as the underlying computing paradigm rather than sparse matrices.![]() https://github.com/borglab/gtsamGTSAM是一个c++库,在机器人多传感器融合及视觉中实现平滑和映射(SAM),使用因子图和贝叶斯网络作为底层框架。
https://github.com/borglab/gtsamGTSAM是一个c++库,在机器人多传感器融合及视觉中实现平滑和映射(SAM),使用因子图和贝叶斯网络作为底层框架。
MATLAB工具箱代码简单直观,可以进行快速实现,但安装MATLAB TOOLBOX时遇到很多坑,最后终于安装成功。
2.安装步骤
2.1 下载GTSAM 4.0.3 Release版本源码
实测,GTSAM Develop以及最新的Release 4.2.07和Release 4.1.1 make过程中都会出现报错:
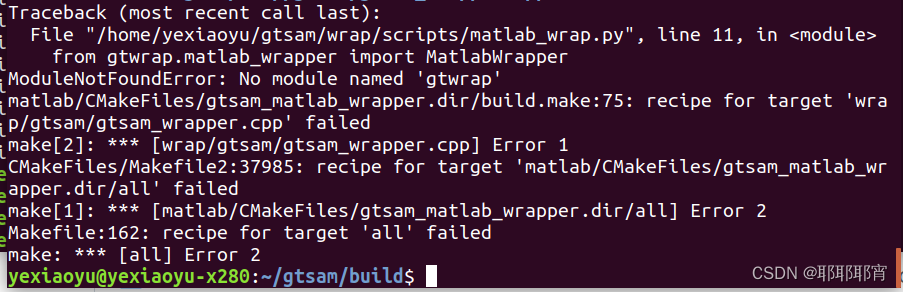
No model named 'gtwrap',这应该算是一个bug吧。按理来说gtwrap文件夹就在wrap里面,不知为何import from gtwrap就是通不过,也专门在Github issues上询问了一下
https://github.com/borglab/gtsam/issues/1118![]() https://github.com/borglab/gtsam/issues/1118也没得到什么靠谱的解决方案。
https://github.com/borglab/gtsam/issues/1118也没得到什么靠谱的解决方案。
一开始是怀疑MATLAB版本的问题,试过MATLAB 2021A MATLAB2018a,都会遇到同样的报错。
2.2 安装步骤
cd gtsam-4.0.3
mkdir build
cd build/
cmake -DEXAMPLES_BUILD_MATLAB_TOOLBOX:OPTION=ON -DGTSAM_TOOLBOX_INSTALL_PATH:PATH=/path/install/toolbox ..
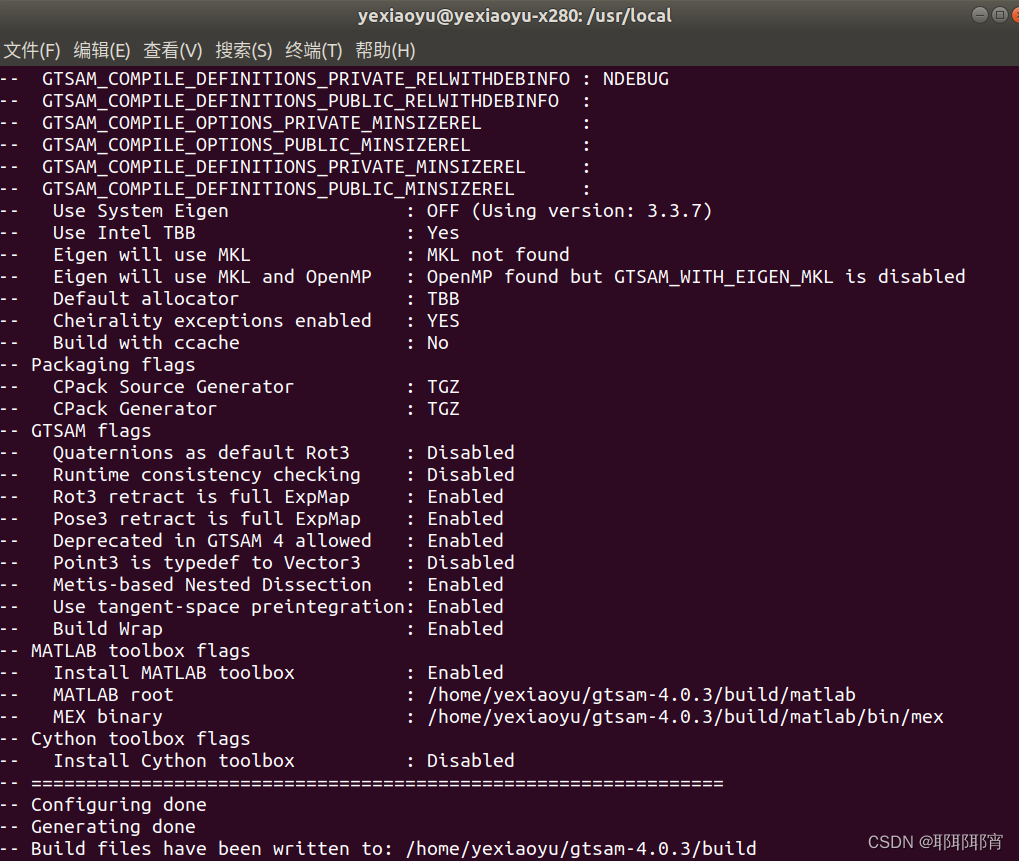
可以看到,MATLAB那块是Enable
make -j12make一下
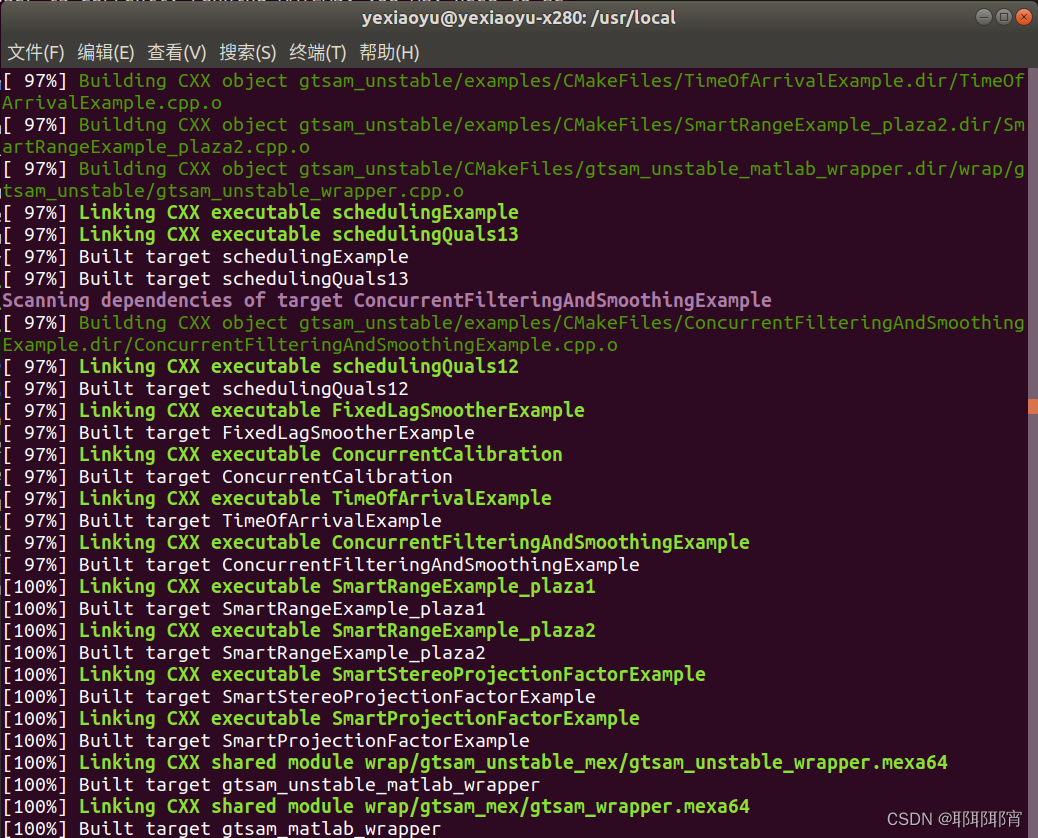
总算成功了
sudo make install
可以看到完成安装,默认路径在/usr/local/下,与MATLAB安装路径并列。
之后还需要对MATLAB进行设置,参考上面那篇博客即可。














 3391
3391











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









