







Ros移动机器人工程
- 整个工程代码架构
- TTL串口DMA发送debug信息
- 超级终端显示
- serial数据协议
- TTL串口DMA发送数据
- TTL串口IRO接收协议
TTL串口DMA发送debug信息
为什么要通过串口打印信息到超级终端?MCU(STM32)没有显示屏
| MCU | 外设 |
| Tx | Rx |
| Rx | Tx |
| GND | GND |
serial数据协议
- 为什么要有数据协议
- 同步码起什么作用
- 定长接收,不定长接收
为保证数据的准确性,需要采取协议的限定。同步码一般是用来对齐数据的。定长与不定长接收数据,更应该需要数据协议的制定。
定长数据协议举栗:
整个数据协议包括:
1. 同步位 (0xFA)
2.数据类型位(枚举型)
3.数据区
4.数据结束位 syn_CR/syn_LF

TTL串口DMA发送数据
TTL串口发送有数据协议的数据,小脑发送ros所需数据到超级终端显示: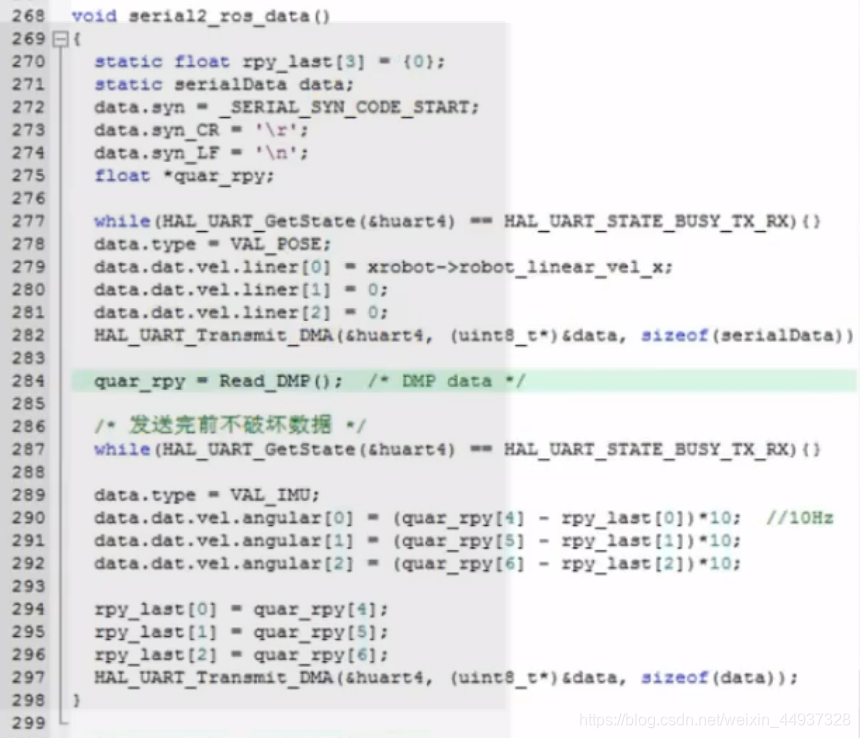
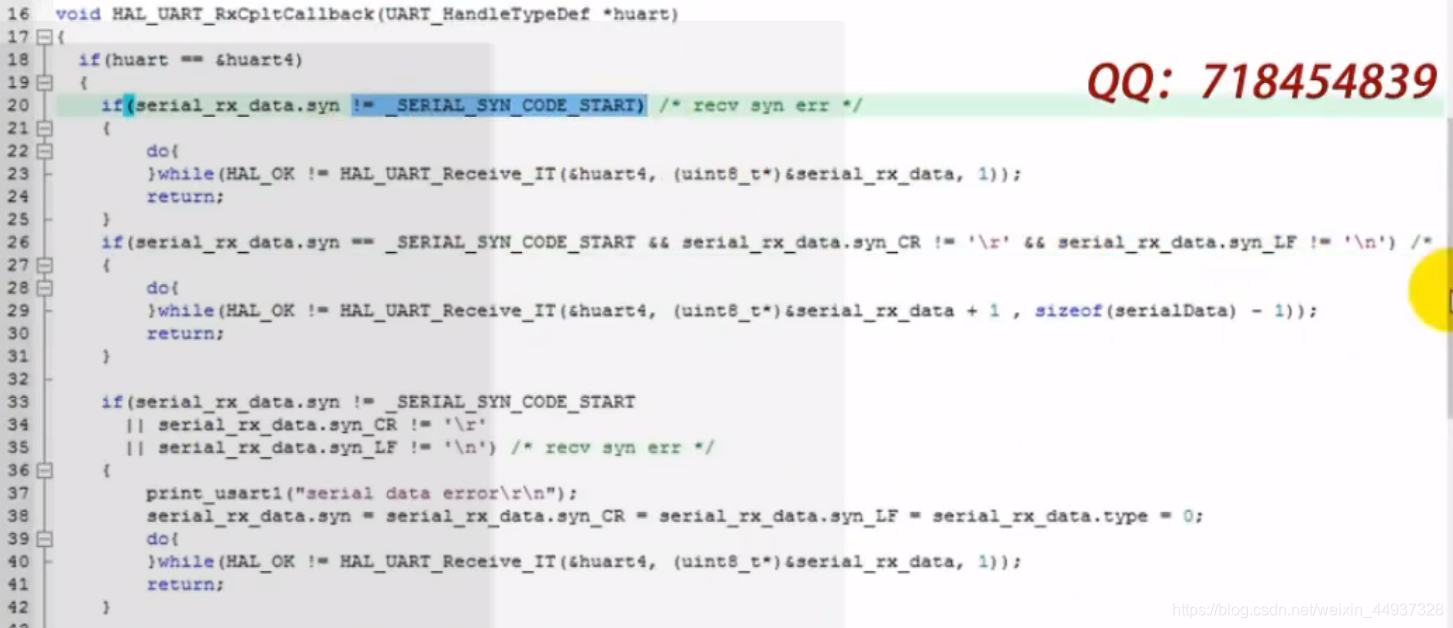
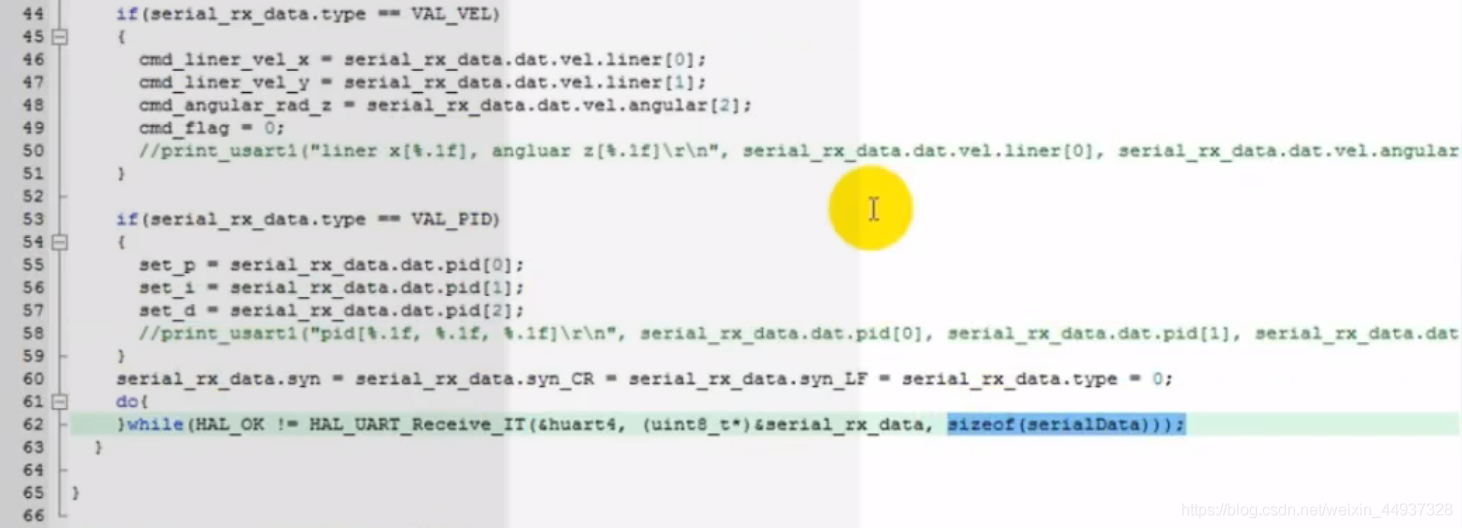
TTL串口IRO接收协议
1.先接收一个字节(第23行),给同步位比较,直到同步位对齐,则开始接收数据
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











