







NCNN框架配置+win10+vs2017+跑通demo
参考如下配置过程:
https://blog.csdn.net/zhaotun123/article/details/99671286
跑通demo:
注意事项:
1.模型文件要放到工程文件目录下面,如果采用绝对路径,会出错,如:

会报错:
fopen H:cnn
cnn-assets-mastermodelspose.param failed
fopen H:cnn
cnn-assets-mastermodelspose.bin failed
find_blob_index_by_name data failed
find_blob_index_by_name conv3_fwd failed
改成:

2.注意看自己ncnn编译的是debug模式还是release模式,不然会出现包找不到、编译出错的情况
3.源代码如下
// Tencent is pleased to support the open source community by making ncnn available.
//
// Copyright (C) 2019 THL A29 Limited, a Tencent company. All rights reserved.
//
// Licensed under the BSD 3-Clause License (the "License"); you may not use this file except
// in compliance with the License. You may obtain a copy of the License at
//
// https://opensource.org/licenses/BSD-3-Clause
//
// Unless required by applicable law or agreed to in writing, software distributed
// under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR
// CONDITIONS OF ANY KIND, either express or implied. See the License for the
// specific language governing permissions and limitations under the License.
#include "net.h"
#include <algorithm>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <stdio.h>
#include <vector>
struct KeyPoint
{
cv::Point2f p;
float prob;
};
static int detect_posenet(const cv::Mat& bgr, std::vector<KeyPoint>& keypoints)
{
ncnn::Net posenet;
posenet.opt.use_vulkan_compute = true;
// the simple baseline human pose estimation from gluon-cv
// https://gluon-cv.mxnet.io/build/examples_pose/demo_simple_pose.html
// mxnet model exported via
// pose_net.hybridize()
// pose_net.export('pose')
// then mxnet2ncnn
// the ncnn model https://github.com/nihui/ncnn-assets/tree/master/models
posenet.load_param("pose.param");
posenet.load_model("pose.bin");
int w = bgr.cols;
int h = bgr.rows;
ncnn::Mat in = ncnn::Mat::from_pixels_resize(bgr.data, ncnn::Mat::PIXEL_BGR2RGB, w, h, 192, 256);
// transforms.ToTensor(),
// transforms.Normalize((0.485, 0.456, 0.406), (0.229, 0.224, 0.225)),
// R' = (R / 255 - 0.485) / 0.229 = (R - 0.485 * 255) / 0.229 / 255
// G' = (G / 255 - 0.456) / 0.224 = (G - 0.456 * 255) / 0.224 / 255
// B' = (B / 255 - 0.406) / 0.225 = (B - 0.406 * 255) / 0.225 / 255
const float mean_vals[3] = {0.485f * 255.f, 0.456f * 255.f, 0.406f * 255.f};
const float norm_vals[3] = {1 / 0.229f / 255.f, 1 / 0.224f / 255.f, 1 / 0.225f / 255.f};
in.substract_mean_normalize(mean_vals, norm_vals);
ncnn::Extractor ex = posenet.create_extractor();
ex.input("data", in);
ncnn::Mat out;
ex.extract("conv3_fwd", out);
// resolve point from heatmap
keypoints.clear();
for (int p = 0; p < out.c; p++)
{
const ncnn::Mat m = out.channel(p);
float max_prob = 0.f;
int max_x = 0;
int max_y = 0;
for (int y = 0; y < out.h; y++)
{
const float* ptr = m.row(y);
for (int x = 0; x < out.w; x++)
{
float prob = ptr[x];
if (prob > max_prob)
{
max_prob = prob;
max_x = x;
max_y = y;
}
}
}
KeyPoint keypoint;
keypoint.p = cv::Point2f(max_x * w / (float)out.w, max_y * h / (float)out.h);
keypoint.prob = max_prob;
keypoints.push_back(keypoint);
}
return 0;
}
static void draw_pose(const cv::Mat& bgr, const std::vector<KeyPoint>& keypoints)
{
cv::Mat image = bgr.clone();
// draw bone
static const int joint_pairs[16][2] = {
{0, 1}, {1, 3}, {0, 2}, {2, 4}, {5, 6}, {5, 7}, {7, 9}, {6, 8}, {8, 10}, {5, 11}, {6, 12}, {11, 12}, {11, 13}, {12, 14}, {13, 15}, {14, 16}
};
for (int i = 0; i < 16; i++)
{
const KeyPoint& p1 = keypoints[joint_pairs[i][0]];
const KeyPoint& p2 = keypoints[joint_pairs[i][1]];
if (p1.prob < 0.2f || p2.prob < 0.2f)
continue;
cv::line(image, p1.p, p2.p, cv::Scalar(255, 0, 0), 2);
}
// draw joint
for (size_t i = 0; i < keypoints.size(); i++)
{
const KeyPoint& keypoint = keypoints[i];
fprintf(stderr, "%.2f %.2f = %.5f\n", keypoint.p.x, keypoint.p.y, keypoint.prob);
if (keypoint.prob < 0.2f)
continue;
cv::circle(image, keypoint.p, 3, cv::Scalar(0, 255, 0), -1);
}
//cv::namedWindow("原图",CV_WINDOW_NORMAL);
cv::imwrite("./pose_check.jpg",image);
cv::imshow("原图", image);
cv::waitKey(50000);
}
int main()
{
std::string imagepath = "./test.jpg";
cv::Mat m = cv::imread(imagepath, 1);
if (m.empty())
{
fprintf(stderr, "cv::imread %s failed\n", imagepath);
return -1;
}
std::vector<KeyPoint> keypoints;
detect_posenet(m, keypoints);
draw_pose(m, keypoints);
return 0;
}
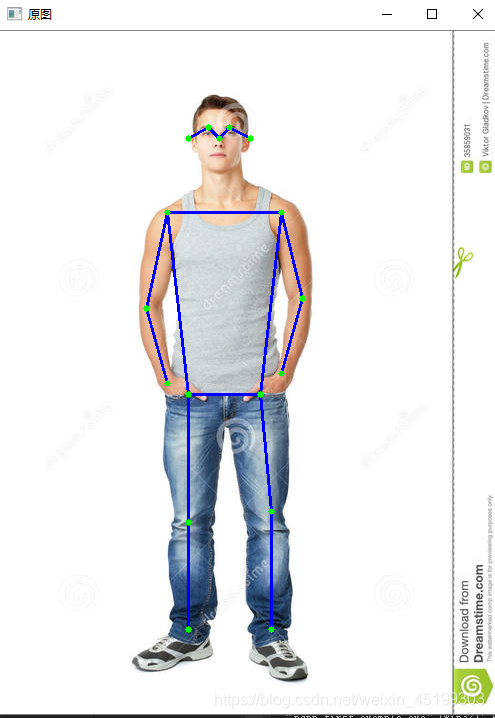
结果展示:














 7665
7665











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









