







从2021年到2024年,江西理工大学飞桨领航团不断发展,江西理工大学飞桨领航团的团员们从技术小白一路攀登,最终获得中国软件杯全国总决赛唯一最高奖——特别奖。以下是江西理工大学飞桨领航团团长徐宽和团队的经历自述:
我们团队由三位成员组成,均来自江西理工大学电气学院的自动化与智能科学系,分别是自动化专业的徐宽(左一)和李升奇(中间),以及智能科学与技术专业的谭凯丰(右一)。


大一,参加飞桨领航团活动和开始打比赛
我们与飞桨的初次相识可以追溯到2021年,那时我们参加了一场由学长组织的人工智能小组线下宣讲会。当时只有不到40人的会场里,大家都在安静地聆听学长讲解人工智能和飞桨的基础知识,并一步步学习如何在飞桨星河社区的线上Notebook上进行学习、编程和跑深度学习模型。

三年前的2021年飞桨领航团讲座影像
随着学期的推进,我们三人逐渐展现了各自的兴趣与特长:谭凯丰开始阅读人工智能方向的论文并尝试代码复现,我则开始使用树莓派走上了嵌入式AI的道路,李升奇则在全面学习各类技术。
大一下学期,仅仅刚掌握《C语言程序设计》的我们,就大胆开始用还没学过的新语言———Python编写软件端的全部代码,去参加全国大学生智能汽车竞赛百度智慧交通组。

2022年第十七届智能车收官合照
第一次打比赛的我们,完全是现学现用:从运动控制接口调用、到回归模型和飞桨目标检测模型的部署,都得依靠百度飞桨官方提供的baseline在做,在全自制车模上,我们熬了无数个夜,由于AI工程经验不足和机械结构方面的欠缺,我们的赛车在赛场上事故频发,甚至小车走直道竟是S型,最终只获得了两项省级奖项,我们的第一次竞赛也在迷茫中画上了句号。

大二,开始参加飞桨领航团特训营
失败后,我们意识到最重要的是总结经验,对竞赛所涉及的知识和技术进行更深入的学习。在大二学年,我开始协助学长处理飞桨领航团的事务,并参加了飞桨特训营的学习。

当时特训营的课程安排与内容
在飞桨领航团特训营里,我们开始规范地学习如何上手深度学习项目,并在各种大佬公开的项目中,摸索和总结规律。
飞桨领航团为学员提供上百个实际应用场景下的AI任务+数据集
从跟着导师进行线上理论学习、再到全流程实现一个简单demo,再到最后自己独立在飞桨星河社区上发布项目教程,我跟着飞桨领航团特训营一步步来走,这一个月的时间,可以说是我大二上学期成长最快的一段时光。我跟着飞桨领航团的各位导师,养成了非常规范的项目开发和开源教程制作流程。

我的特训营作业:用PaddleSeg打造AI医疗项目
大二下学期开始,我又一次参加了飞桨领航团特训营的学习,最后的结业作业,我发布的项目获得了很高的浏览量与Fork数,最高浏览量达到2.9K,Fork数达278。

我明显感受到,我正在一步步从零基础小白成长为入门级开发者,也越来越有自信。

我的AI Studio个人主页成就,战绩丰硕
经过飞桨领航团特训营的“锻造”,这一年,我们三人重新组成团队统一战线,对智能汽车竞赛百度智慧交通组再次发起冲锋,同时还参加了中国软件杯的飞桨小汪赛道。与上次的迷茫不同,经过一年时间的学习与总结,我们对智能车涉及的AI全流程技术栈都已经基本熟络。

大二暑假,历经坎坷,国赛终获一等奖
分工明确——电控、视觉、机械、模型训练部署,各自负责的部分完成后进行整合,协同开发。第十八届智慧交通组赛题发布特别晚,我们就加班加点干,去往成都比赛的前五天,我们才顺利完赛。
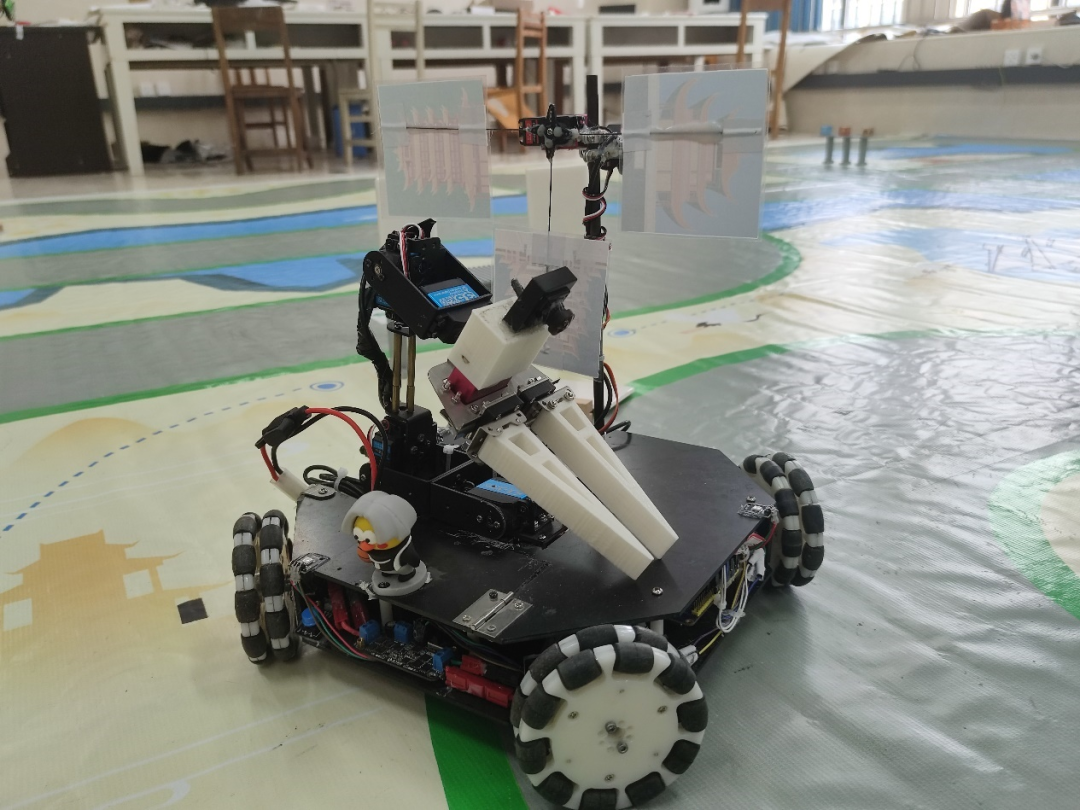
自制车模
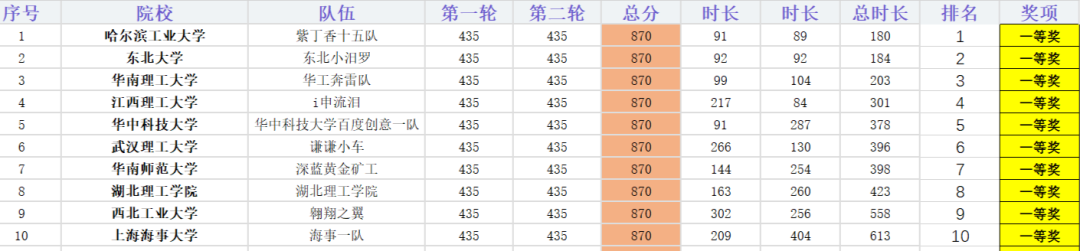
在成都锦城学院举办的智能车区域赛中,我们以全场唯一的满分成绩夺得第一,成功晋级总决赛;由学弟组成的二队也取得了第五的优异成绩,获得区域赛一等奖。区域赛结束,我们便马不停蹄的开始准备总决赛,为了进一步提升智能车的稳定性,我们针对机械结构、电控、视觉进行更深层次的优化,分析车身重心、改写控制逻辑、优化视觉算法,经过近半个月的努力,智能车在实验室跑出了78秒的最快成绩,平均成绩稳定在81秒。
然而,在总决赛现场,由于环境光照的影响,智能车表现得极不稳定。在第一轮比赛中,由于反光问题,智能车在距离终点不到一米的地方突然失控,冲出了赛道。由于受到赛场紧张氛围的影响,智能车失控后我们未能在第一时间进行重启,白白浪费了两分钟。但幸运的是,我们仍以217秒的满分成绩完成了第一轮比赛。
此时,团队气氛降到了冰点,如果下一轮再出现失误,我们很可能与国一无缘。我们持续进行测试,并为防止代码出错,始终将初始代码保留在剪贴板,随时准备替换。幸运的是,第二天上午,我们以84秒的成绩顺利完成比赛,创下了赛年第二快的满分成绩,最终获得了总决赛第四名,获得全国一等奖。
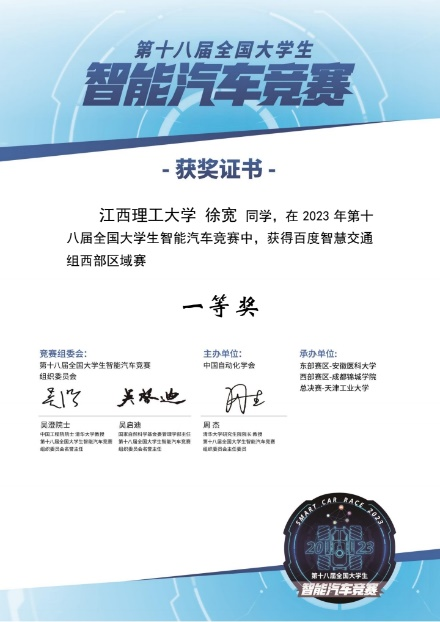
强者如云的总决赛获奖团队与我的奖状
在接下来的半年中,我们对上一年竞赛中的经验进行了深度沉淀,同时总结了在飞桨小汪赛道上失败的原因。2023年是国产大模型蓬勃发展的一年,飞桨星河社区平台发布了大量大模型的学习资料与开源项目。借助 ERNIE SDK 和各类教程,我们结合大模型和小模型的混合开发,尝试了一些全新的思路,也为第二年的比赛奠定了更加扎实的理论与实践基础。

大三暑假,大模型助我夺得中国软件杯最高奖,成功保研
今年,我们再次参加了中国软件杯——飞桨小汪赛道。在飞桨星河社区线上打榜赛中,我们基于飞桨,在目标检测任务中,取得了第一名的成绩。在线下地图赛上,我们基于赛题要求,对宇树Go1机器狗进行了开发。
同时,我们还对其交互性进行了额外优化,将机器狗与文心大模型结合,成功打造出一只能够理解外界环境进行,甚至听懂人话的“智慧小汪”。最终,我们以线上打榜赛和线上初赛双满分的成绩顺利晋级总决赛。

决赛现场的我们
在总决赛的赛场上,我们依然面临挑战。由于鱼眼摄像头的问题,分割模型将现场的外景和引导线一起识别为前景,导致机器狗的算法紊乱,控制系统异常混乱。这个时候,基于飞桨养成的熟练的AI工程经验,让我们在现场不到两个小时的调试时间内,从重新现场采集数据、自动标注、训练模型、部署和接入控制,最终,我们成功解决问题,取得49.7秒的满分成绩,领先其他队伍!
挑战并未到此结束,答辩现场,我们团队的PPT出现了不是最新版本、视频无法播放等一些列突发问题,但我们依旧保持镇定,沉着应对,面对评委老师的提问,仔细回答。最终,我们夺得了该赛项全国一等奖,并在15个赛项,18支国一队伍,5000多支参赛队伍中脱颖而出,夺得2024年中国软件杯全国总决赛唯一最高奖——特别奖。

夺得中国软件杯最高奖的现场
今年,作为江西理工大学飞桨领航团团长的我,也将在新的学年,带领校内学弟学妹们继续前行,组织更多校内开发者,继续在飞桨领航团的各类活动中,提升AI技术和科创能力。
回顾过去,蓦然回首,那些熬过了的无数的夜,竟也变成了照亮前路的光。
微信添加助手,加入你本校的领航团/成为飞桨领航团团长


关注【飞桨PaddlePaddle】公众号
获取更多技术内容~


















 3258
3258

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









