









MATLAB机器人工作空间三轴机器人scara
MATLAB代码:
%建立机器人模型
% theta d a alpha offset
L1=Link([0 0 2 0 0 ]); %定义连杆的D-H参数
L2=Link([0 0 1.8 0 0 ]);
L3=Link([0 0 0.8 0 0 ]);
L4=Link([0 0 1 0 0 ]);
L5=Link([0 0 2 0 0 ]);
L6=Link([0 0 2 0 0 ]);
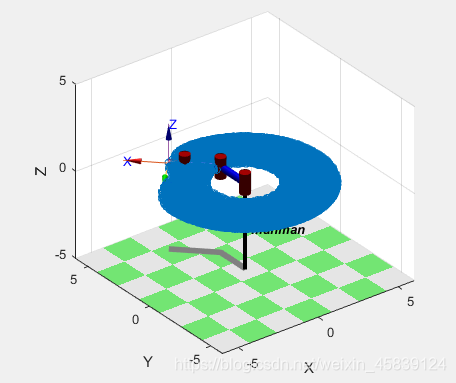
robot=SerialLink([L1 L2 L3 ],'name','manman'); %连接连杆,机器人取名manman
A=unifrnd(-pi,pi/2,[1,30000]);%第一关节变量限位
B=unifrnd(-pi/2,pi/2,[1,30000]);%第二关节变量限位
C=unifrnd(-pi,pi,[1,30000]);%第三关节变量限位
G= cell(30000, 3);%建立元胞数组
for n = 1:30000
G{n} =[A(n) B(n) C(n)];
end %产生3000组随机点
H1=cell2mat(G); %将元胞数组转化为矩阵
T=double(robot.fkine(H1)); %机械臂正解
figure(1)
scatter3(squeeze(T(1,4,:)),squeeze(T(2,4,:)),squeeze(T(3,4,:)))%随机点图
robot.plot([pi/2 pi/4 0],'workspace',[-5 5 -5 5 -5 5 ],'tilesize',2)%机械臂图















 1150
1150











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











