



 本文详细介绍了如何使用Visual Studio 2019结合OpenCV进行相机标定的过程,包括下载OpenCV、配置环境、修改cpp文件、创建xml文件以及运行程序。重点讲解了代码修改部分,特别是棋盘格尺寸、正方形边长和输入文件的设置。最后,相机参数矩阵将保存在out_camera_data.yml文件中。
本文详细介绍了如何使用Visual Studio 2019结合OpenCV进行相机标定的过程,包括下载OpenCV、配置环境、修改cpp文件、创建xml文件以及运行程序。重点讲解了代码修改部分,特别是棋盘格尺寸、正方形边长和输入文件的设置。最后,相机参数矩阵将保存在out_camera_data.yml文件中。
首先安装vs2019并配置
安装方法可自行网上去查怎么配置,不是本文重点,所以略过
opencv下载网址:https://opencv.org/releases/
我安装的是
准备需要的文件
- cpp文件
在OpenCV文件D:\opencv\sources\samples\cpp中找到 calibration.cpp
- xml文件
这个文件是用来存储一会标定的时候会用到的棋盘格的图像的名字,如图:
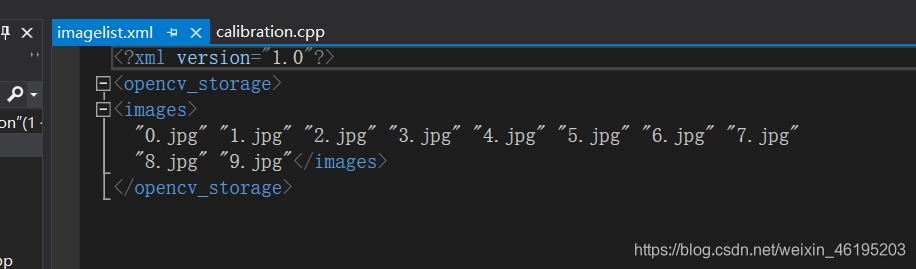
这个文件你可以用OpenCV的imagelist_creator.cpp来做(作者https://blog.csdn.net/panpan_jiang1/article/details/80429937有介绍)
或者你也可以找一个xml文件,然后自己手动敲进去
注意calibration.cpp、imagelist.xml和棋盘格照片要放在同一个文件夹下
运行
在vs2019中
步骤:新建项目,导入现有项,选择calibration.cpp。配置OpenCV属性管理器,一切准备就绪!这步就简单省略了
配置好之后还需要修改一行代码:
原代码
cv::CommandLineParser parser(argc, argv,
"{help ||}{w||}{h||}{pt|chessboard|}{n|10|}{d|1000|}{s|0.025|}{o|out_camera_data.yml|}"
"{op||}{oe||}{zt||}{a|1|}{p||}{v||}{V||}{su||}"
"{@input_data||}");
修改之后代码
cv::CommandLineParser parser(argc, argv,
"{help ||}{w|8|}{h|6|}{pt|chessboard|}{n|10|}{d|1000|}{s|0.025|}{o|out_camera_data.yml|}"
"{op||}{oe||}{zt||}{a|1|}{p||}{v||}{V||}{su||}"
"{@input_data|imagelist.xml|}");
其中{w|8|}{h|6|}为你所使用的棋盘格的内角点数
{s|0.025|}为棋盘格的正方形边长(单位m)
{o|out_camera_data.yml|}输入文件存放名称
{@input_data|imagelist.xml|}你要准备的xml文件的名字
修改完之后 就可以运行了,结果在 out_camera_data.yml中查看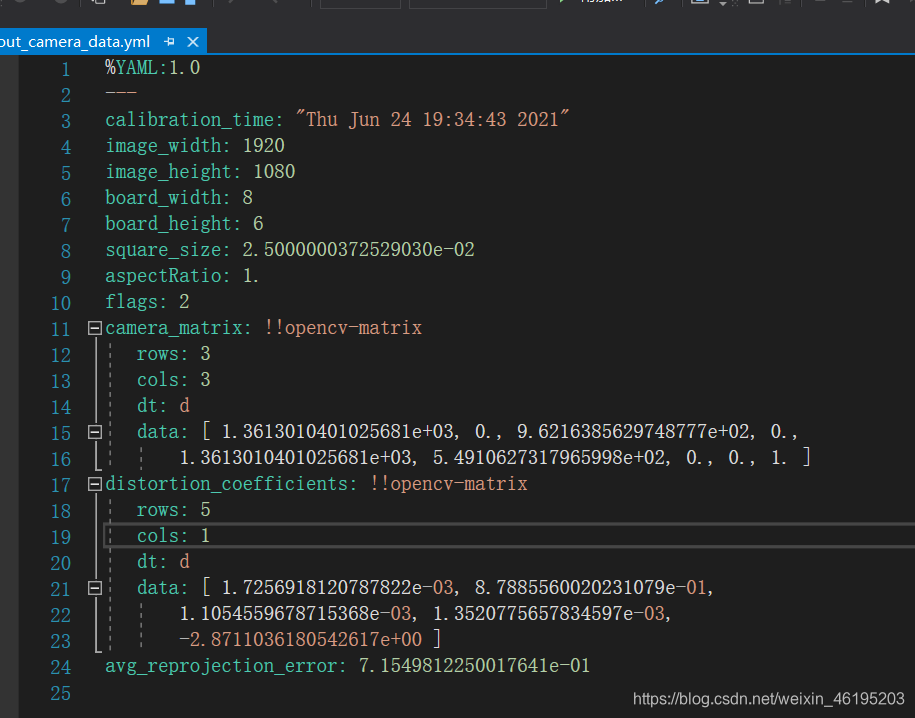
相机参数矩阵为
[ 1361.301, 0, 962.16385629748777,
0, 1361.3010401025681, 549.10627317965998,
0, 0, 1 ]

















 3400
3400

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









