







MATLAB自适应模糊控制
一维函数逼近仿真程序
针对一位函数g(x),设计一个模糊系统f(x),使之一致地逼近定义在U=[-3,3]上的连续函数g(x)=sin(x)所需精度为0.2
运行效果:


clear all;
close all;
L1=-3;L2=3;
L=L2-L1;%变化范围的长度为L
h=0.2;%一维函数,根据公式求得h
N=L/h+1;%根据L、h求模糊集的个数N
T=0.01;
x=L1:T:L2;
%对应的横坐标值
for i=1:N
e(i)=L1+L/(N-1)*(i-1);
end
c=0;d=0;
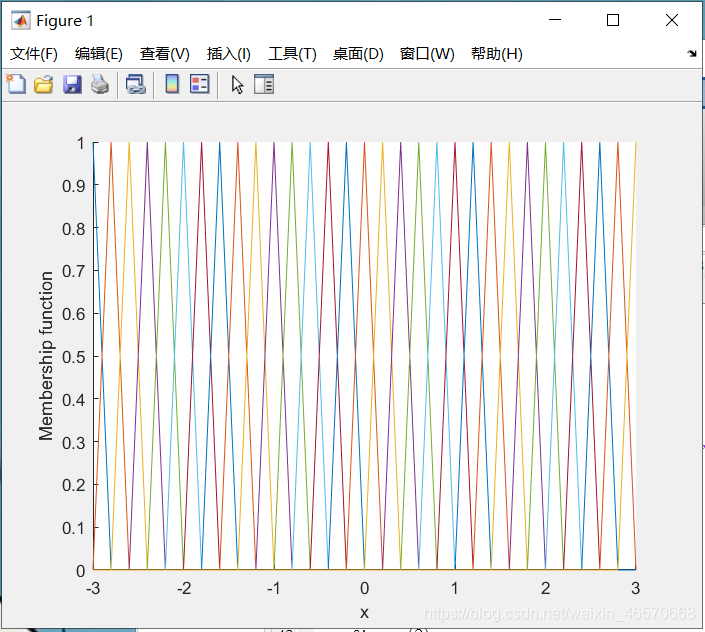
%在U上定义31个具有三角形隶属函数的模糊集
for j=1:N
if j==1
u=trimf(x,[e(1),e(1),e(2)]); %The first MF
elseif j==N
u=trimf(x,[e(N-1),e(N),e(N)]); %The last MF
else
u=trimf(x,[e(j-1),e(j),e(j+1)]);
end
hold on;
plot(x,u);
c=c+sin(e(j))*u;
d=d+u;
end
xlabel('x');ylabel('Membership function');
for k=1:L/T+1
f(k)=c(k)/d(k);
end
y=sin(x);
figure(2);
plot(x,f,'b',x,y,'r');
xlabel('x');ylabel('Approaching');
figure(3);
plot(x,f-y,'r');
xlabel('x');ylabel('Approaching error');
二维函数逼近仿真程序
%针对二维函数g(x),设计一个模糊系统f(x),使之一致地逼近定义在U=[-1,-1]*[-1,1]上的连续函数
%g(x)=0.52+0.1x1+0.28x2-0.06x1x2
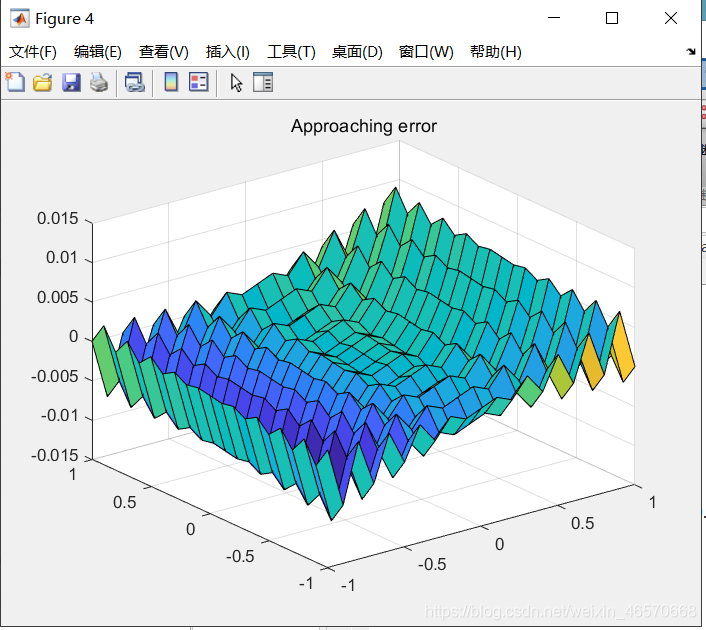
%所需精度为0.1
运行效果:

clear all;
close all;
T=0.1;
x1=-1:T:1;
x2=-1:T:1;
%根据计算取h1=h2=0.2,N=L/h+1
L=2;
h=0.2;
N=L/h+1;
%求对应的横坐标(e1i,e2j)
for i=1:1:N %N MF
for j=1:1:N
e1(i)=-1+L/(N-1)*(i-1);
e2(j)=-1+L/(N-1)*(j-1);
gx(i,j)=0.52+0.1*e1(i)^3+0.28*e2(j)^3-0.06*e1(i)*e2(j);
end
end
df=zeros(L/T+1,L/T+1);
cf=zeros(L/T+1,L/T+1);
%x1的隶属函数
for m=1:1:N %u1 change from 1 to N
if m==1
u1=trimf(x1,[-1,-1,-1+L/(N-1)]); %First u1
elseif m==N
u1=trimf(x1,[1-L/(N-1),1,1]); %Last u1
else
u1=trimf(x1,[e1(m-1),e1(m),e1(m+1)]);
end
figure(1);
hold on;
plot(x1,u1);
xlabel('x1');ylabel('Membership function');
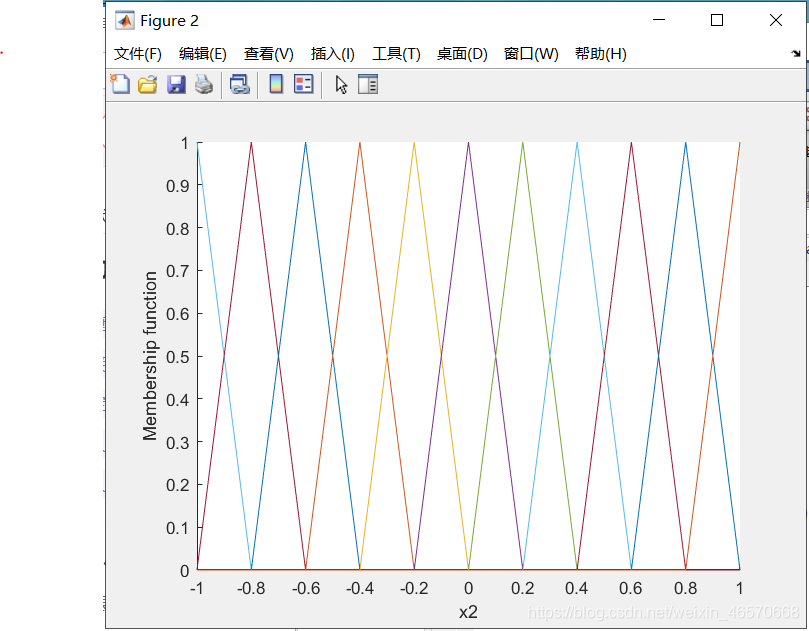
%x2的隶属函数
for n=1:1:N %u2 change from 1 to N
if n==1
u2=trimf(x2,[-1,-1,-1+L/(N-1)]); %First u2
elseif n==N
u2=trimf(x2,[1-L/(N-1),1,1]); %Last u2
else
u2=trimf(x2,[e2(n-1),e2(n),e2(n+1)]);
end
figure(2);
hold on;
plot(x2,u2);
xlabel('x2');ylabel('Membership function');
%根据公式求模糊系统
for i=1:1:L/T+1
for j=1:1:L/T+1
d=df(i,j)+u1(i)*u2(j);
df(i,j)=d;
c=cf(i,j)+gx(m,n)*u1(i)*u2(j);
cf(i,j)=c;
end
end
end
end
%求模糊系统、x1,x2对应函数值
for i=1:1:L/T+1
for j=1:1:L/T+1
f(i,j)=cf(i,j)/df(i,j);
y(i,j)=0.52+0.1*x1(i)^3+0.28*x2(j)^3-0.06*x1(i)*x2(j);
end
end
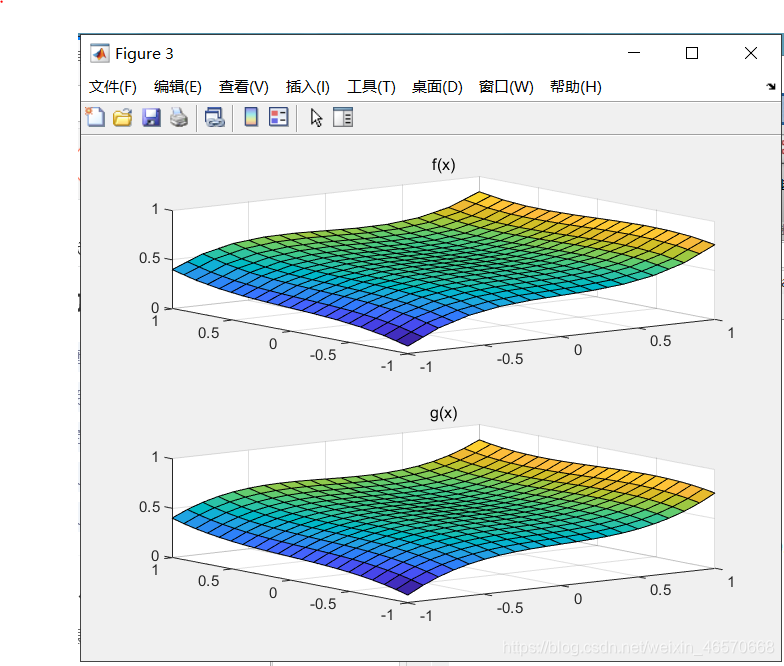
figure(3);
subplot(211);
surf(x1,x2,f);
title('f(x)');
subplot(212);
surf(x1,x2,y);
title('g(x)');
figure(4);
surf(x1,x2,f-y);
title('Approaching error');















 133
133











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











