







“物联网开发实战”学习笔记-(一)硬件开发环境的搭建
这里的分享是通过自己的整理总结出的一个课程的学习笔记,我想用简洁易懂的步骤来分享一个物联网建立的过程。
这里课程上有四个 4 个产品场景
1.可以手机控制的智能电灯
2.可以基于光线自动调节的智能电灯
3.可以语音控制的智能音箱
4.可以基于环境温湿度和土壤湿度自动浇水的浇花器
不过,在打造这些产品场景之前,我们还需要先搭建好硬件开发环境。以智能电灯为例,去说下这个硬件开发的准备。
通信技术:Wi-Fi
为了能让手机控制电灯,我们首先要让电灯接入网络。
选择WI-FI的原因:
1.从通信速率来看,智能电灯传输的数据,包括控制命令和几种状态的数值,数据量都非常小,这几种通信技术都可以满足要求。
2.从功耗来看,智能电灯是直接连接电线的,不需要电池供电,所以低功耗的 BLE 和 ZigBee 技术不是必须的选择,功耗相对较高的 Wi-Fi 也可以考虑。
3.从普及度和易用性的角度分析,如果使用 BLE,设备与手机的交互确实会非常方便。但是 BLE 和 ZigBee 的设备都有一个缺点,就是需要搭配专有的网关才能连接互联网,这在部署和使用的时候都比较麻烦。所以,我们选择 Wi-Fi 作为智能电灯的通信方式。
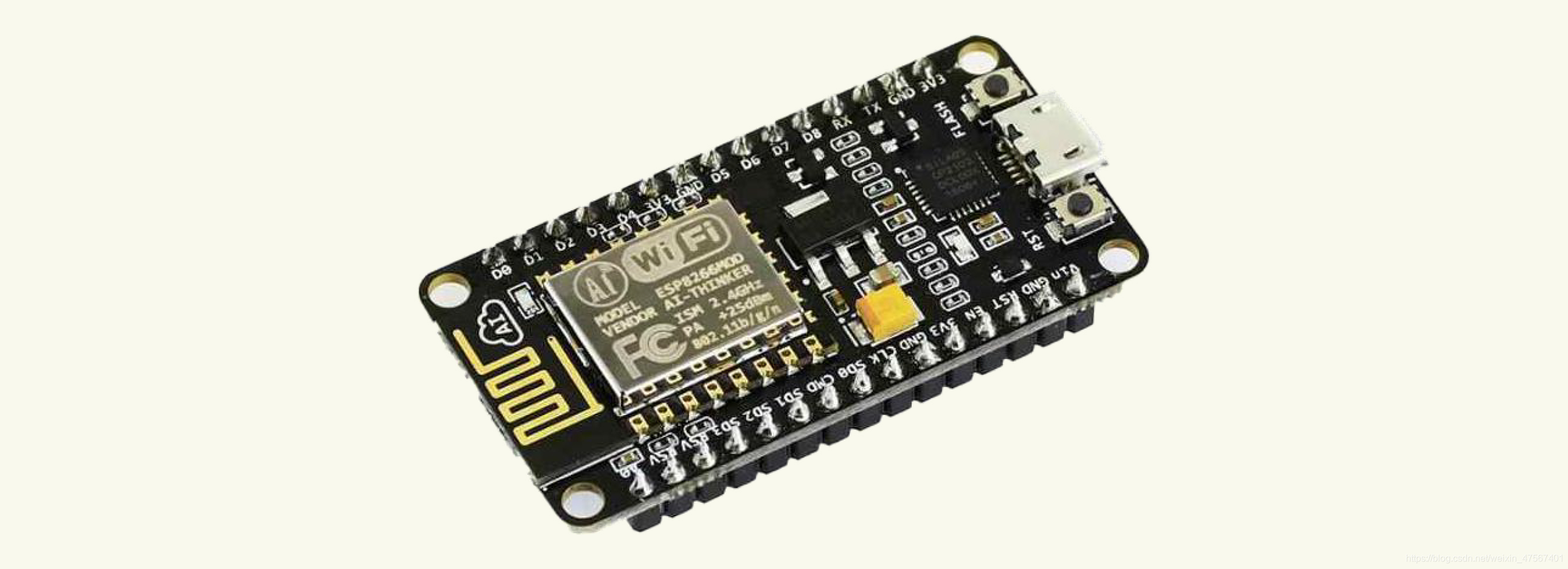
开发板:NodeMCU
选择开源硬件的开发板的原因。
1.硬件、软件的各种技术实现是公开的,方便分析问题,也方便后期转化为量产的产品;
2.有社区氛围,使用的人比较多,大家可以针对具体的问题进行交流。
这里我们选择NodeMCU 。基于 ESP8266 芯片的版本,Flash 空间有 4MB,自带 Wi-Fi 功能,而且价格便宜,在国内外都非常流行。我在某多上买的10块钱。
开发语言:Python
相比于C语言, Python 语言显得更为简单,必要的时候还可以调用很多库。
因为嵌入式硬件的计算资源都非常有限,我们使用的是专门为嵌入式系统打造的 MicroPython 它完整实现了 Python3.4 的语言特性,部分支持 Python3.5 的特性。在标准库方面MicroPython 实现了 Python 语言的一个子集,另外还增加了与底层硬件交互的库模块。
搭建 MicroPython 开发环境
接下来就来把 MicroPython 部署到 NodeMCU 开发板上,准备好开发环境。
第一步:准备固件文件
首先,我们需要为 NodeMCU 准备好 MicroPython 固件文件。MicroPython 官方已经为 ESP8266 芯片准备了现成的固件
MicroPython 的固件分为 2M、1M 和 512K 三个不同的版本,针对不同大小的 Flash 存储空间。我们下载最新的 2M 稳定版本(带 stable 的)就行,因为 NodeMCU 开发板的 Flash 空间是足够的。
第二步:安装烧录工具
然后,我们使用一根 USB 数据线,将 NodeMCU 开发板和电脑连接起来。
接着,我们在电脑终端运行下面的命令,安装用来烧录的工具 esptool :
pip install esptool
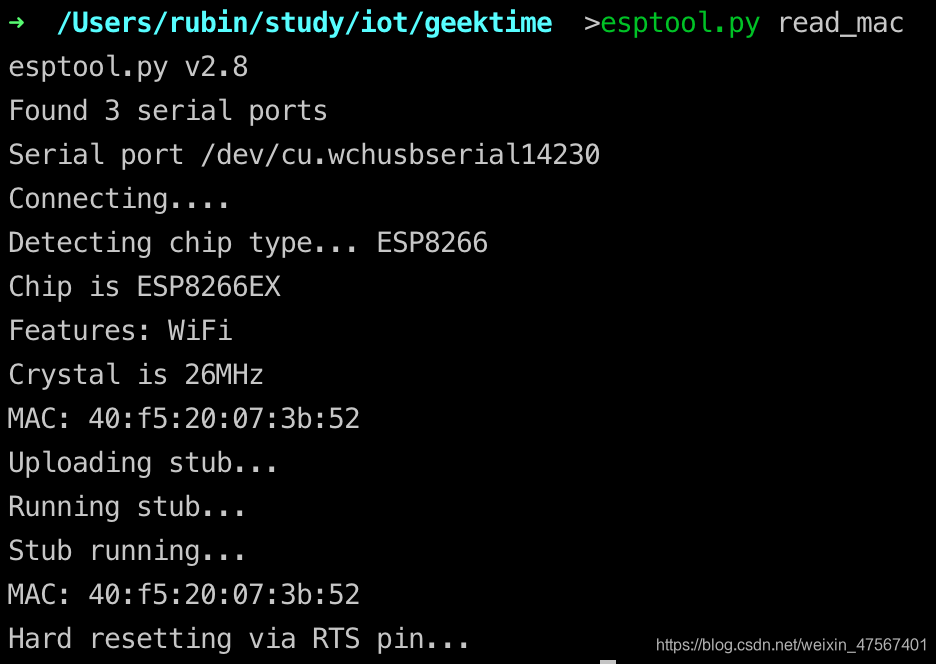
esptool 安装完成后,你可以运行 esptool.py read_mac 命令,确认 NodeMCU 板子是否连接成功。连接成功后的屏幕显示是这样的:
如果连接不成功,或者没有正确识别设备,屏幕上则会出现下面的结果:
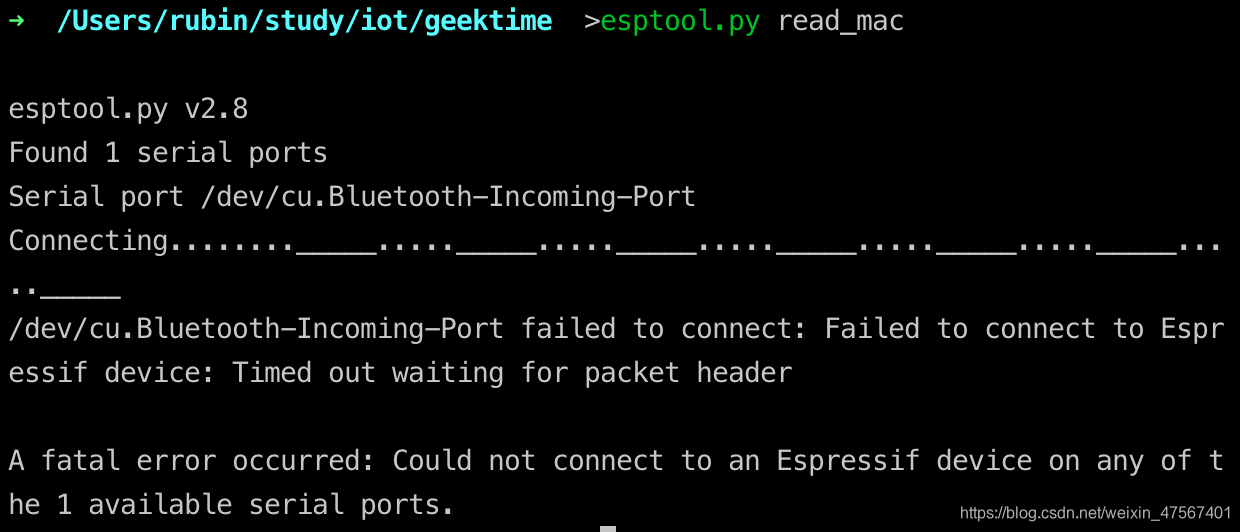
不行的原因
1.检查一下使用的 USB 线能否传输数据。现在很多电子产品会随带 USB 充电线,但是为了节约成本,有些 USB 线内部实际上并没有集成两根数据信号线。如果使用了这种线,就只能充电,而电脑是识别不出设备的。
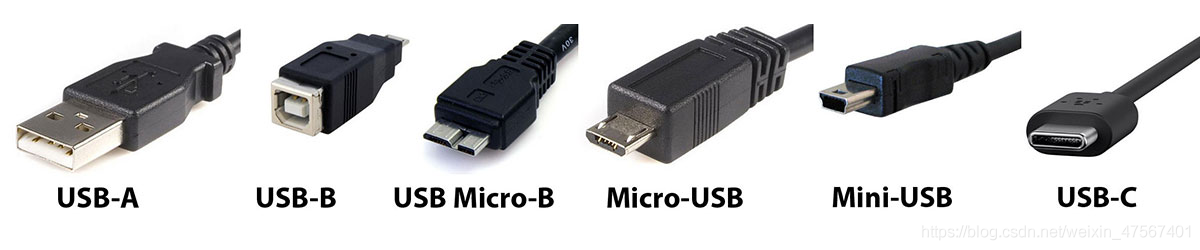
另外,注意我们使用的数据线,一头是 USB-A 接口,另一头是 Micro-USB 接口。USB 的接口规格繁多,我在这里放了一张图,方便你区分。
2.驱动文件有没有安装好。
如果你跟我一样,用的是 macOS 系统,可以在电脑的终端上输入 ls /dev/cu* 命令,查看是否有类似 /dev/cu.wchusbserialxxxxx 名字的设备文件。
如果你使用 Windows 系统,那么需要查看一下“设备管理器”,看看“端口(COM 和 LPT)”下面,有没有 COM* 结尾的设备。我在一开始完单片机和Arduino的时候都是遇到了驱动的问题,一般都要安装驱动CH340就解决了。
如果没有,可以参考这篇文章,下载相应的驱动文件安装。
当你在终端看到类似下面的结果,或者在 Windows 的设备管理器中看到 COM* 设备时,就说明开发板已经成功识别。

如果仍然无法正确识别,可以到一些论坛去交流,比如安信可的官方论坛。
第三步:烧录固件
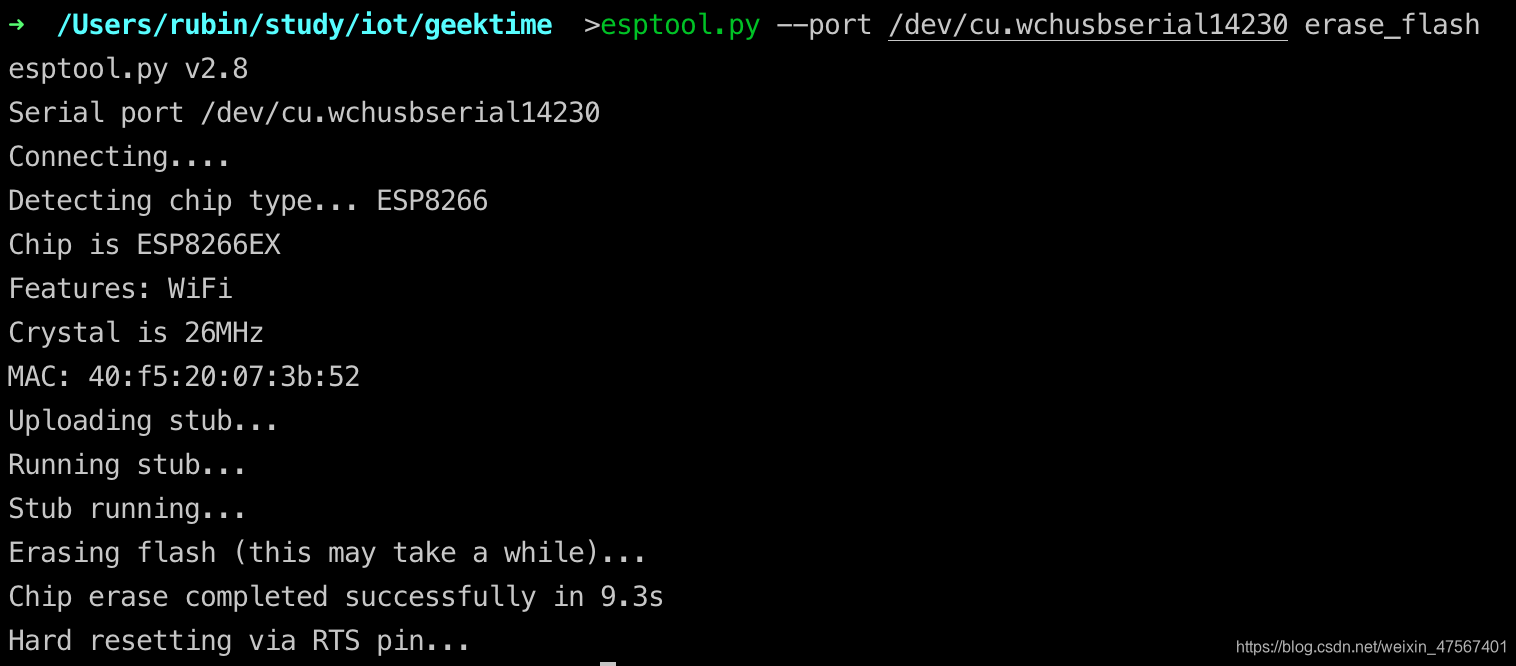
接下来我们烧录固件。在这之前,我们需要先输入下面命令,擦除 Flash 芯片:
#注意设备名称替换为你电脑上的名称
esptool.py --port /dev/cu.wchusbserial14230 erase_flash
擦除成功后,我们进入存储前面下载固件的目录中,运行下面的命令,将固件文件烧录到开发板的 Flash 中:
#注意设备名称替换为你电脑上的名称,固件文件名称做类似修改
esptool.py --port /dev/cu.wchusbserial14230 --baud 460800 write_flash --flash_size=detect 0 esp8266-20200911-v1.13.bin
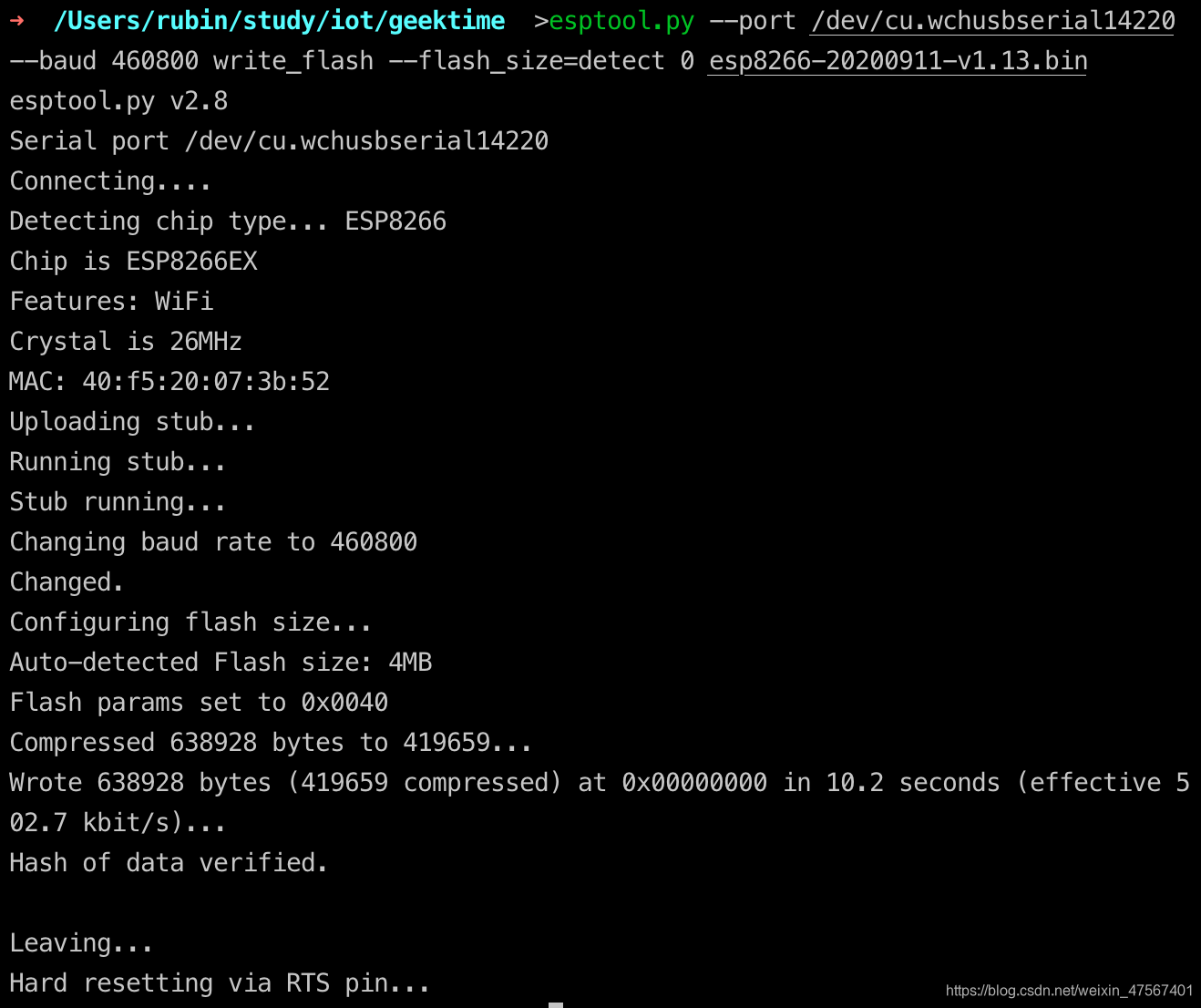
烧录成功后,MicroPython 已经在你的开发板上运行起来了。
第四步:确认运行状态
但是开发板跟电脑不一样,是没有显示屏的,我们要怎么确认它的运行状态呢?
有一种非常简便的方法,你可以用电脑或者手机搜索一下周围的 Wi-Fi 热点,如果看到类似 “MicroPython-xxxxxx” 名称的热点(xxxxxx 是开发板 MAC 地址后半部分),说明你的 NodeMCU 工作正常。比如开发板 MAC 地址是“40:f5:20:07:3b:52”,如果看到了“MicroPython-073b52”这个热点,就说明开发板在正常运行。
当然,对于 Python 来说,更方便的交互方式还是 REPL (交互式解释器),这个 MicroPython 也提供了。我们可以通过 REPL 来检验开发板的运行。
我们还是使用烧录时用到的 USB 线连接开发板和电脑。在 MacOS 电脑上,重新连接开发板的时候,串口设备名称可能会改变,所以为保险起见,再次运行命令:
ls /dev/cu*
获得串口设备名称之后,我们可以使用终端模拟器软件,比如 SecureCRT,通过串口协议连接上开发板,进行交互。
需要注意的是,波特率(Baud rate)设置为 115200,这与前面烧录时选择的值不同。
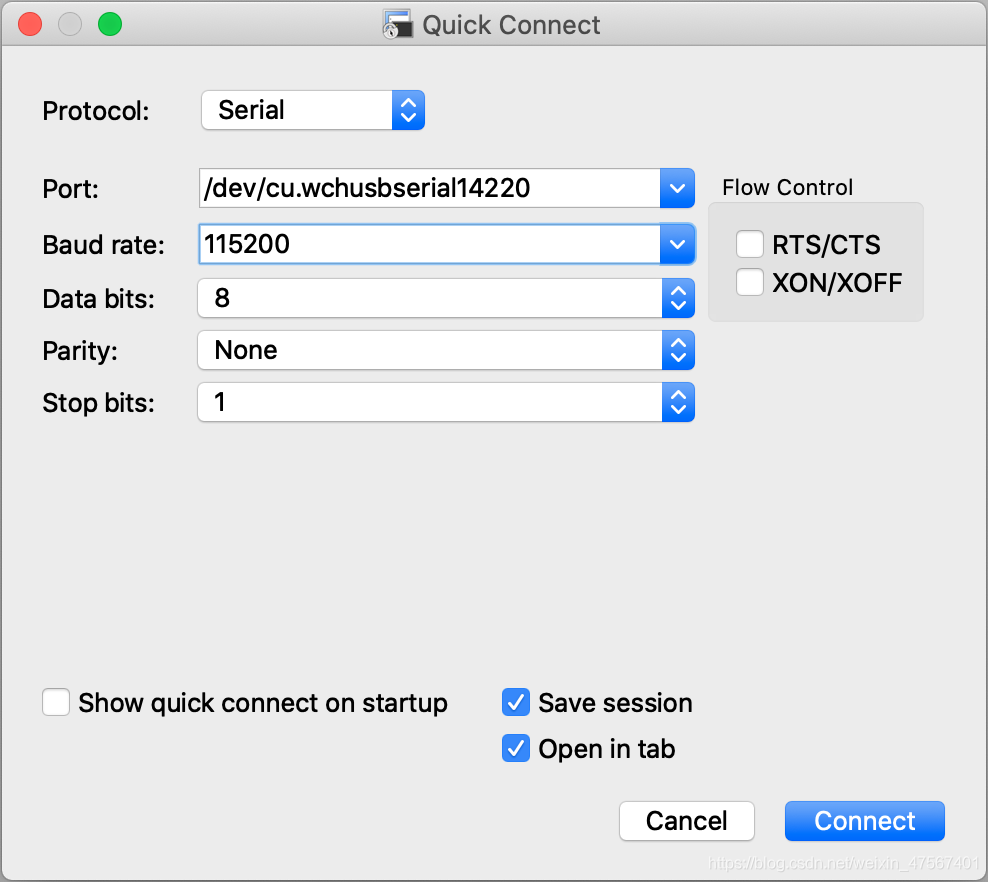
如果你使用 Windows 操作系统,那么 PuTTY 更加流行。当然,建立连接的参数设置都是类似的。
成功连接后,SecureCRT 的窗口会输出类似下面的结果:
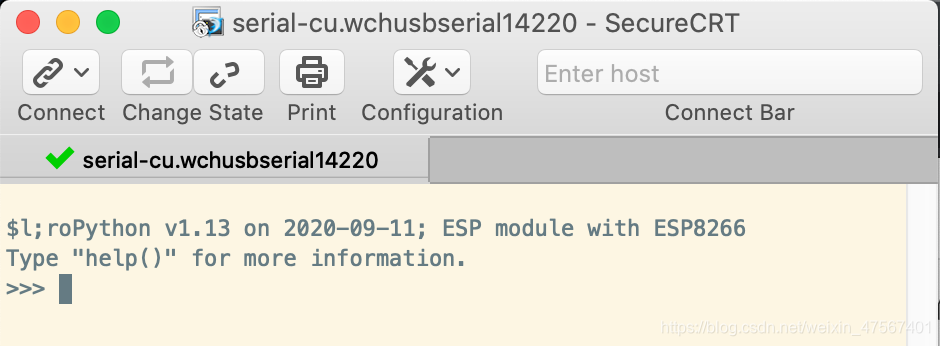
看到熟悉的符号 “>>>”,我们就知道,可以真正进行交互了。
第五步:体验交互
先用“Hello World”来个经典的打招呼吧。
接着,我们体验一下 MicroPython 控制 LED 灯。因为开发板 NodeMCU 12F 的 GPIO2 管脚接有一个 LED 灯,你可以输入下面的代码,控制它的点亮和熄灭。
>>> print("Hello World from MicroPython!")
Hello World from MicroPython!
>>> import machine
>>> pin = machine.Pin(2, machine.Pin.OUT)
>>> pin.off()
>>> pin.on()
需要注意的是,不同的板子上,这个管脚的高低电平的设计可能不同,所以 pin.on() 可能是熄灭 LED 灯;pin.off() 反而是点亮 LED 灯。
部署代码到开发板
那么,能不能运行一个 Python 代码文件呢?比如,基于在 REPL 中尝试的点亮 LED 操作。
我们写一个代码段:
import machine
import time
#指明 GPIO2 管脚
pin = machine.Pin(2, machine.Pin.OUT)
#循环执行
while True:
time.sleep(2) # 等待 2 秒
pin.on() # 控制 LED 状态
time.sleep(2) # 等待 2 秒
pin.off() # 切换 LED 状
这段代码实现的功能是,控制 LED 灯以 2 秒的间隔,不断点亮、熄灭。
为了在电路板上运行这个 Python 代码,我们需要做两件事情:
将代码段保存到一个文件中,这个文件的名字必须是 main.py。
将代码文件 main.py 放到开发板的文件系统中,而且是根目录。
这样,当开发板启动或者重启的时候,就会自动执行 main.py 文件中的代码。
第一点我们可以很容易做到。但是,怎么把代码文件上传到开发板上呢?
MicroPython 的官方提供了一个工具pyboard.py,它也是基于串口连接与开发板通信的。你可以使用它操作开发板上的文件系统,比如常用的拷贝文件、创建文件夹、删除等功能,甚至可以将电脑上的代码文件加载到内存中,直接运行。这非常便于你在开发过程中,进行代码的调试。
下载 pyboard.py 的源文件到电脑后,你可以运行下面的命令,将 main.py 文件部署到你的开发板:
#设置环境变量,指明串口设备
export PYBOARD_DEVICE=/dev/cu.wchusbserial14220
#拷贝当前目录下的 main.py 到开发板
./pyboard.py cp main.py :
不过,pyboard.py 在 MacOS 系统上运行有问题。比如,在电脑终端,尝试运行下面的命令,就会收到 “could not enter raw repl” 这个错误信息。
./pyboard.py -f ls /
这可能是 MacOS 上的串口芯片 CH340 的驱动的问题,它会在建立串口连接时,重置 NodeMCU ,导致 enter_raw_repl 函数无法正常执行。
这个时候有几个解决方案
使用 AdaFruit MicroPython tool —— ampy。安装过程可以打开链接了解,我就不展开了。一般情况下,你可以用下面的命令完成安装:
pip install adafruit-ampy
# ---或者---
pip3 install adafruit-ampy
ampy 是通过增加延时的方法,来规避 MacOS 系统上的问题的。所以在使用的时候,我们需要先设置一个环境变量 —— AMPY_DELAY。延时的推荐值是 0.5,不过,具体实践时,你需要根据自己的开发板的试验情况,灵活调整这个数值。
export AMPY_DELAY=0.5
我们可以在终端中输入上面的指令,也可以将它加入到 .bashrc 或 .zshrc 等配置文件中,避免每次都要重复输入。
使用 ampy 的过程中,常用的环境变量还有下面两个,可以根据具体情况设置:
#设备名称请根据你的情况修改
export AMPY_PORT=/dev/cu.wchusbserial14220
#串口通信的波特率
export AMPY_BAUD=115200
然后,输入下面的命令,就把代码部署到开发板上了。
ampy put main.py
学习笔记总结自‘物联网开发实战’–郭朝斌
–笔记只用于学习交流,请不要用于商业用途。
















 892
892











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











