







主要使用:
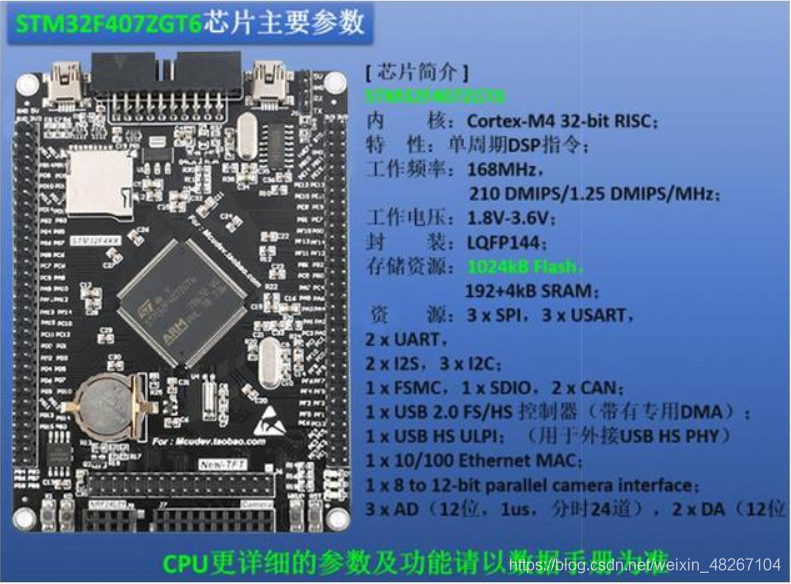
1、单片机STM32F407
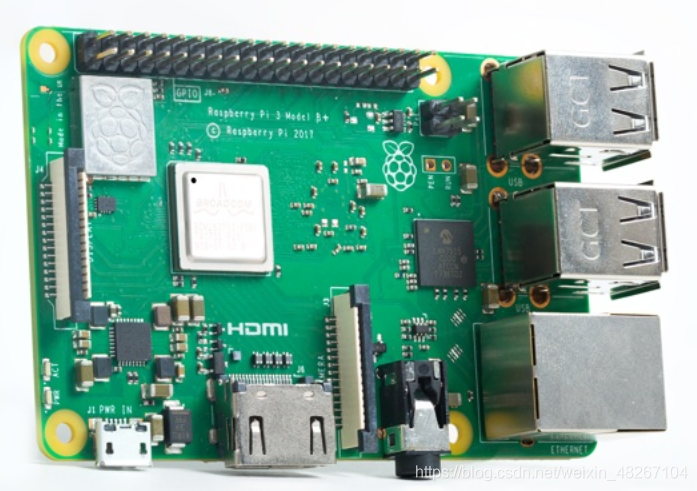
2、树莓派3B+
3、OpenMV4摄像头
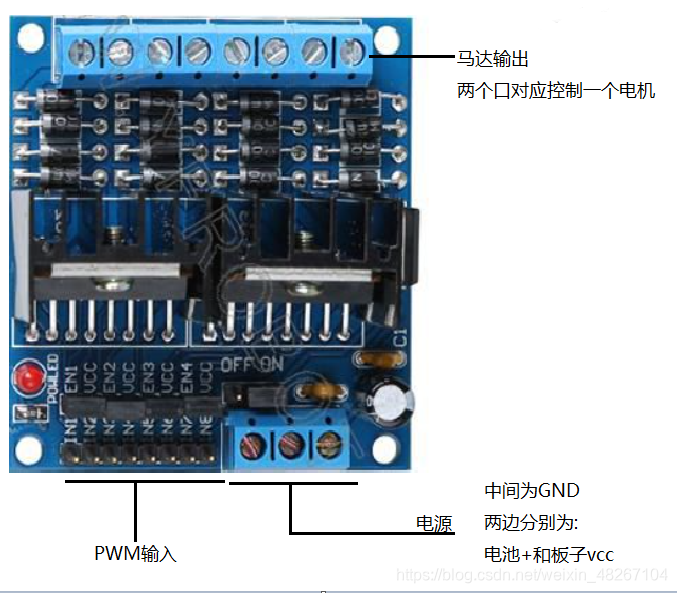
4、L298N四路电机驱动模块
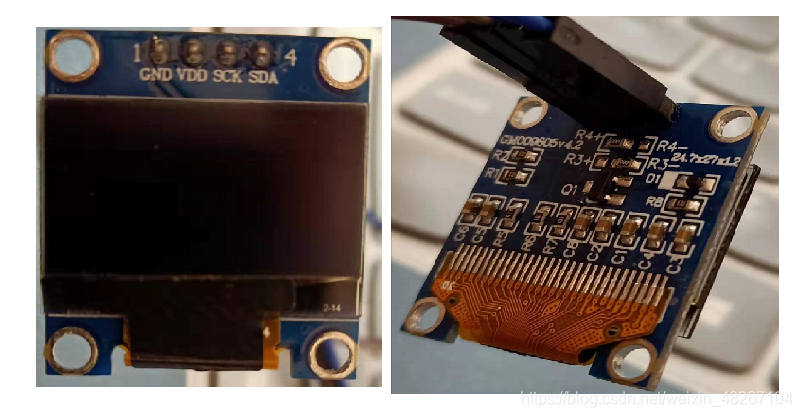
5、OLED屏幕
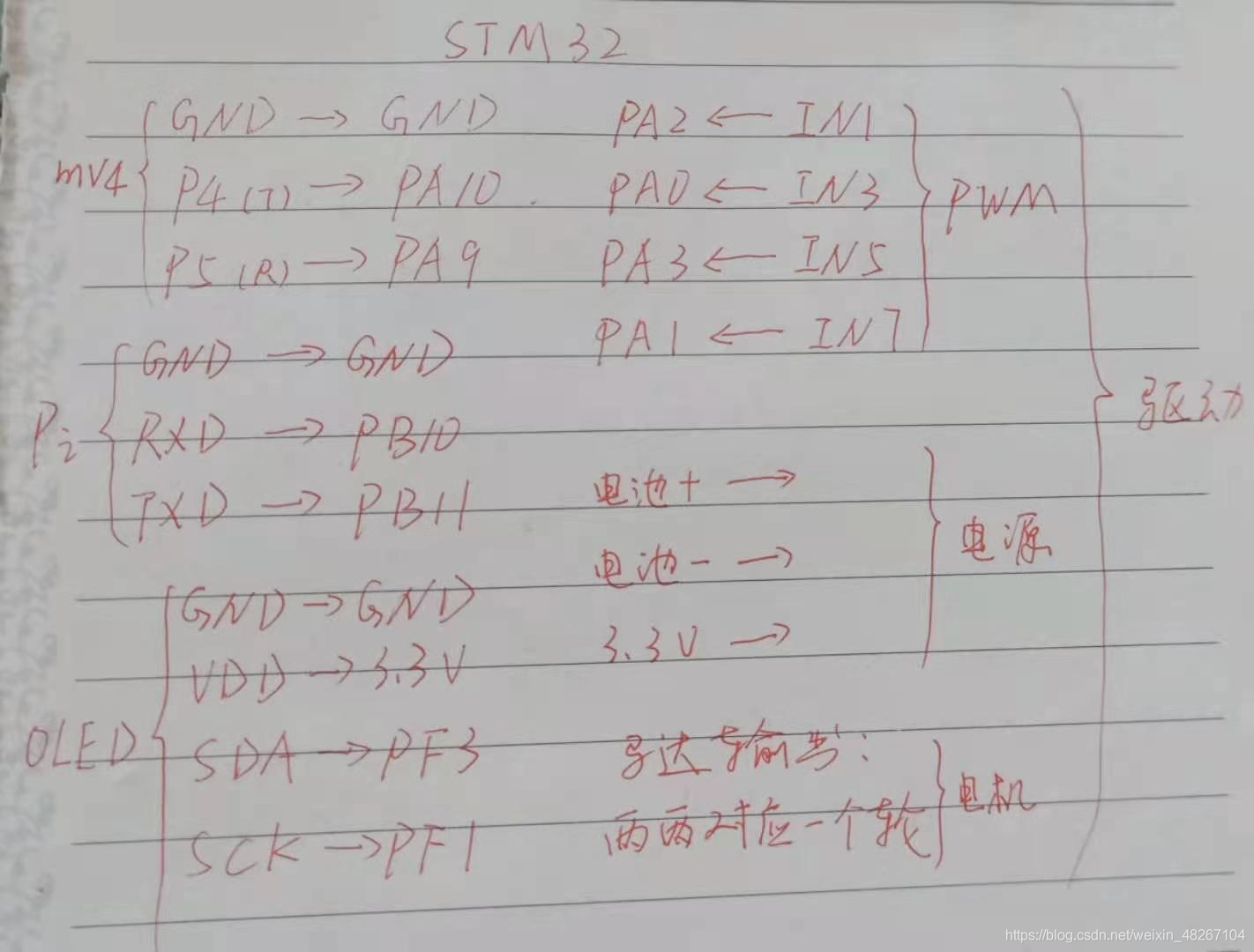
总IO口接线:
各部分功能:
STM32:
作为主控,完成的功能为:
1、控制小车运动:通过STM32输出PWM波给驱动模块进行小车运动状态的控制。
2、与OpenMV4串口通信:实现与OpenMV4的串口收发字符类型数据功能。
3、与树莓派串口通信:实现与树莓派的串口收发字符类型数据功能。
4、OLED屏的显示:让OLED屏能显示表示当前状态的字符。

OpenMV4:
主要完成循迹部分图像数据采集:
1、寻线:OpenMV4摄像头将获得的轨迹进行处理,得到轨迹的一个偏离角度,然后通过偏转角判断给STM32发送左转或右转的信号。
2、停止:MV4通过模板匹配和识别圆双重判断是否目标为圆,如果是则给STM32发出信号来停止小车运动并开始树莓派识别。

树莓派3B+:
通过树莓派上的摄像头模块(Pi Cam)进行目标识别:
树莓派通过颜色识别和形状判断,如果发现绿色的圆,即发现目标,则显示发现目标。
电机驱动和OLED屏:
电机驱动主要通过STM3给的PWM波对小车运动进行控制。
OLED屏主要显示表示当前状态的字符,主要为了能更加清楚当前状态,并进行调试。
资源链接:
总项目文件:下载链接
下一篇文章:循迹识别小车:(二)STM32部分














 8474
8474











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









