




 本文介绍使用广度优先和深度优先算法解决迷宫问题的方法。通过两种算法对比,阐述了迷宫寻路的基本原理和实现过程。并给出了具体的实验代码。
本文介绍使用广度优先和深度优先算法解决迷宫问题的方法。通过两种算法对比,阐述了迷宫寻路的基本原理和实现过程。并给出了具体的实验代码。
实验问题:
给定一个n*n的迷宫,要求利用广度优先和深度优先算法解决迷宫问题
问题分析:
对于此问题首先要明确搜索顺序
可以分为两种方法求解问题:1.广度优先算法2.深度优先算法
(1)对于深度优先算法来说:<如果规定遍历顺序为下,右,上,左>
首先对于起始节点寻找其下节点,如果此节点能走,将其压入堆栈,并以此节点为准,在寻找其下节点,如果能走压入,不能走,就依次寻找右,上,左节点。直到找到最后一个节点即出口,将堆栈的值依次输出就是迷宫的路径。
(2)对于广度优先算法来说:<如果规定遍历顺序为下,右,上,左>
首先对于起始节点寻找其下节点,如果此节点能走,将其压入队列,并将起始节点压出队列。不能走就依次搜索右,上,左。直到找到最后一个节点即迷宫的出口。
数学建模:
开辟两个数组分别记录搜索顺序
用一个二位数组初始化迷宫,有墙处就是1,没墙处就是0,并归定不同的迷宫数组状态,maze[i][j]=0说明可以走;<maze[i][j]=1说明是墙;maze[i][j]=2说明无法继续 走;maze[i][j]=3说明已走>
依次按顺序搜索,搜索到一个节点就将其置为3,并依次顺序搜索这个节点的下,右,上,左节点。
当遇到无路可走且还未到终点时,将此节点值回复为0,并回溯到上个节点寻找解。
实验代码:
//采用深度优先算法解决走迷宫问题
//#define _CRT_NO_SECURE_WARNINGS
//
//#include<stdio.h>
//#include<iostream>
//
//using namespace std;
//
//int maze[8][8] = { {0,0,0,0,0,0,0,0},{0,1,1,1,1,0,1,0},{0,0,0,0,1,0,1,0},{0,1,0,0,0,0,1,0},{0,1,0,1,1,0,1,0},{0,1,0,0,0,0,1,1},{0,1,0,0,1,0,0,0} ,{0,1,1,1,1,1,1,0} };
//确定搜索顺序(下,右,上,左)
//int X[4] = { 1,0,-1,0 };
//int Y[4] = { 0,1,0,-1 };
//maze[i][j]=0说明可以走
//maze[i][j]=1说明是墙
//maze[i][j]=2说明无法继续走
//maze[i][j]=3说明已走
//
//打印路径
//void print() {
// for (int i = 0;i < 8;i++) {
// for (int j = 0;j < 8;j++) {
// if (3 == maze[i][j]) {
// cout << "A";
// }
// else {
// cout << "-";
// }
// }
// cout << "\n";
// }
// cout << "\n";
// cout << "********"<<'\n';
// cout << "\n";
//}
//
//void search(int i, int j) {
// int x = 0;
// int y = 0;
// 按照一个方向搜索到最后
// for (int k = 0;k < 4;k++) {
// x = i + X[k];
// y = j + Y[k];
//
// 搜索到可以走的结点
// if (x >= 0 && x < 8 && y >= 0 && y < 8 && 0 == maze[x][y]) {
// maze[x][y] = 3;
// 搜索到迷宫的最后一个结点即出口
// if (7 == x && 7 == y) {
// print();
// maze[x][y] = 0;
// }
// else {
// search(x, y);
// }
// }
// }
// 若不成功回溯时将此节点置为0让其可以被其他路径访问
// maze[i][j] = 0;
//}
//
//int main() {
// maze[0][0] = 3;
// search(0, 0);
// system("pause");
// return 0;
//}
//采用广度优先算法解决走迷宫问题
#define _CRT_NO_SECURE_WARNINGS
#include<stdio.h>
#include<iostream>
#include<vector>
using namespace std;
int maze[8][8] = { {0,0,0,0,0,0,0,0},{0,1,1,1,1,0,1,0},{0,0,0,0,1,0,1,0},{0,1,0,0,0,0,1,0},{0,1,0,1,1,0,1,0},{0,1,0,0,0,0,1,1},{0,1,0,0,1,0,0,0} ,{0,1,1,1,1,1,1,0} };
//确定搜索顺序(下,右,上,左)
int X[4] = { 1,0,-1,0 };
int Y[4] = { 0,1,0,-1 };
//maze[i][j]=0说明可以走
//maze[i][j]=1说明是墙
//maze[i][j]=2说明无法继续走
//maze[i][j]=3说明已走
struct sq {
int x;
int y;
int pre;
};
void print() {
for (int i = 0;i < 8;i++) {
for (int j = 0;j < 8;j++) {
if (3 == maze[i][j]) {
cout << "A";
}
else {
cout << "-";
}
}
cout << "\n";
}
cout << '\n';
}
void mark(vector<sq>& q, int dex) {
sq temp = q[dex];
maze[temp.x][temp.y] = 3;
//找到合适路径
if (0 == temp.x && 0 == temp.y) {
return;
}
//未找到路径回溯上一个节点
else {
mark(q, temp.pre);
}
}
void search() {
struct sq point;
struct sq temp;
int qh = 0;
int qe = 1;
point.x = 0;
point.y = 0;
point.pre = -1;
vector<sq> q;
int x = 0;
int y = 0;
//-1代表被访问过
maze[point.x][point.y] = -1;
q.push_back(point);
//队列不为空
while (qh != qe) {
//节点出队
temp = q[qh];
qh++;
//寻找下个节点可以走的地方
for (int k = 0;k < 4;k++) {
//按照一个方向搜索到最后
x = temp.x + X[k];
y = temp.y + Y[k];
if (x >= 0 && x < 8 && y >= 0 && y < 8 && 0 == maze[x][y]) {
//找到节点
sq get_point;
get_point.pre = qh - 1;
get_point.x = x;
get_point.y = y;
//让其入队
q.push_back(get_point);
qe++;
//找到迷宫的最后一个节点即出口
if (7 == x && 7 == y) {
mark(q, qe - 1);
print();
return;
}
}
}
}
}
int main() {
maze[0][0] = 3;
search();
system("pause");
return 0;
}
实验结果:
广度优先遍历:
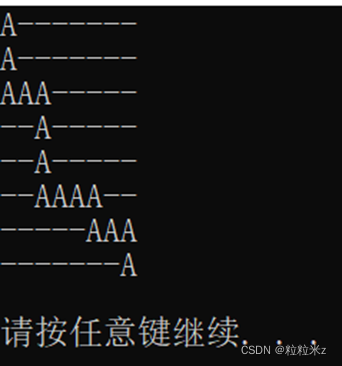
深度优先遍历:



时间复杂度分析:
最坏情况下:O(4(m*n-1))(4为4个方向,m*n为迷宫空间)每个点都试探了一遍
最好情况O(min(m*n)-1)
算法的时间复杂度为O(2m*n)


















 3917
3917

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











