






16~20的版本都装过,双系统虚拟机的也装了一遍,也是很无语了,说说我自己遇到的问题吧。
1.双系统还是虚拟机
别犹豫,一定双系统
2.哪个版本
随便吧,但是我发现有些包是指定在18和16装,我自己的电脑哪个版本都挺好的,但是我到时配的那个16以上的版本在ubuntu系统下无法网络连接(至今未解决)
3配置SLAM所需的ubuntu环境
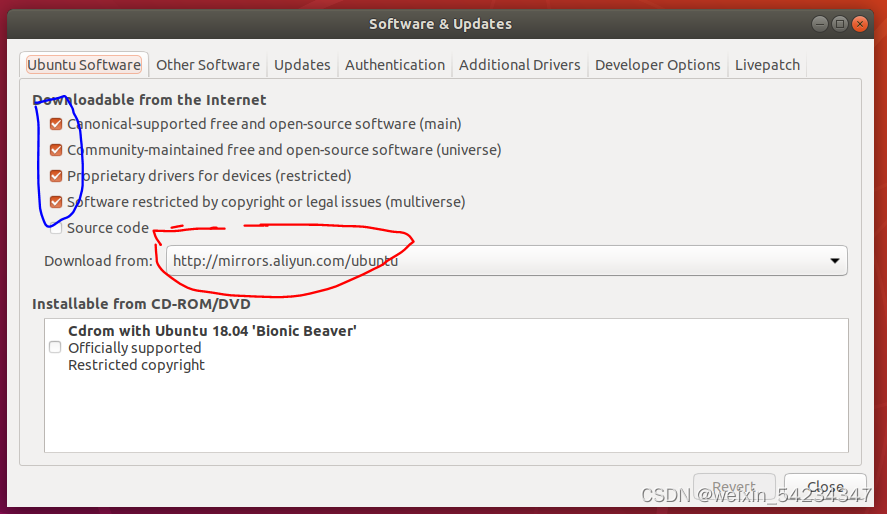
1)安装好系统后第一件事情就要修改源,但是不要随便修改源的文件(第一次装乌邦图的时候简直被坑惨了)
在software&update修改,蓝色线的地方全部勾选,红色线的地方选一个中国的源,我选的是阿里源(尽量不要去动源的文件),然后就可以装其他包,软件啥的
2)ros——安装对应版本,按着ROS安装文件操作就行,出错最多就是下面这个问题
ROS安装过程中如何解决 rosdep update 命令出现错误
解决(参考这个博主,亲测有效):ROS安装过程中如何解决 rosdep update 命令出现错误 - 知乎 (zhihu.com)
2)cmake版本升级:千万别删除原来的版本,可以在原来版本上升级 (都是踩过的坑啊)
3)安装ceres
4)PCL库:不用自己装,ROS完成后自带了,自己装毛病估计一大堆,我就是因为这个库装错了怎么都调不回来,只能重装了乌邦图
基础的我就装了这些,差不多就够了,算法复现的时候不同算法可能需要装不一样的库,跟着算法步骤装就好了,也不容易出错














 5953
5953











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









