







为了解决“城市峡谷”扭曲GPS精度的问题,参与其“连接车辆试点计划”的纽约市交通局(NYCDOT)团队正在使用增强的“车辆到所有”(V2X)定位定位引擎–现在他们找到了一种验证此位置信息的方法。

图1:纽约市GNSS位置数据未经校正的准确性示例
位置来自CV设备中的地理位置系统(GPS)。从足够的卫星测量信号,以在计算的精度稀释度(DOP)中定义用户的位置。在城市的城市峡谷中,由于建筑物高大,可见的卫星较少,导致地面GPS信号变差或丢失,这是由于卫星信号被遮挡或信号从周围反弹并在到达地面时形成多条路径而引起的。街道(或峡谷层)。图1显示了仅使用GPS数据几次在同一街区行驶时车辆的未校正路径。
通过测量路边单位的“飞行时间”,可以将其他位置信息与GPS信息融合在一起,以减少误差并改善位置估计。但是,在测试这些技术时,重要的考虑因素是车辆跟踪路径并返回相同位置的可重复性,以及验证准确性的能力。
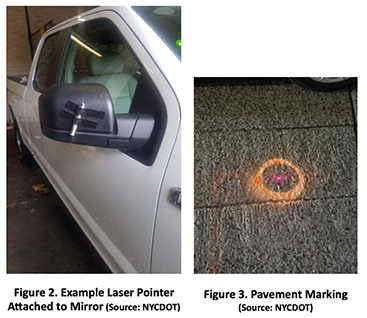
使用简单的激光笔,胶带和临时粉笔喷漆(水溶性)解决了这种可重复性。激光笔暂时固定在每辆车的后视镜和保险杠上(如图2所示)。将车辆停在停车杆上时,用粉笔喷漆在人行道上标记激光(如图3所示)。这样,驾驶员在记录位置信息时,每次在街区周围行驶时,都可以将车辆反复对准停车杆。
使用这种方法,NYCDOT的CV驾驶员团队能够使用行驶时间信息和GNSS数据来验证车辆位置的准确性。
通过使用这些数据,NYCDOT的CV驾驶员员团队能够量化每次运行的位置差异,测量车辆在停杆处检测到的偏差。车载单元的内部位置信息在车辆每次定位在同一点的几次运行中被检索。图4显示了使用上面描述的激光指针方法的车辆路径。图4中的圆圈表示在标记位置使用激光指示器从车辆收集的数据。

图4:与上述相同路线上的更正位置信息
作者:汤姆·斯通
点击阅读原文可查看原文。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









