






报告由中汽研与华为联合发布,文章围绕自动驾驶安全模型展开,涵盖概述、应用、模型介绍及展望等内容,旨在探讨如何保障自动驾驶安全。
自动驾驶安全模型概述:全球交通事故频发,人为过失占比高,先进驾驶辅助系统应运而生,但自动驾驶系统仍存在安全问题。自动驾驶安全模型可用于评估、约束自动驾驶系统行为,保障其安全性。联合国世界车辆法规协调论坛对其定义为通过函数判断是否需避免碰撞;本文定义则更全面,涉及安全距离、路权等多方面。
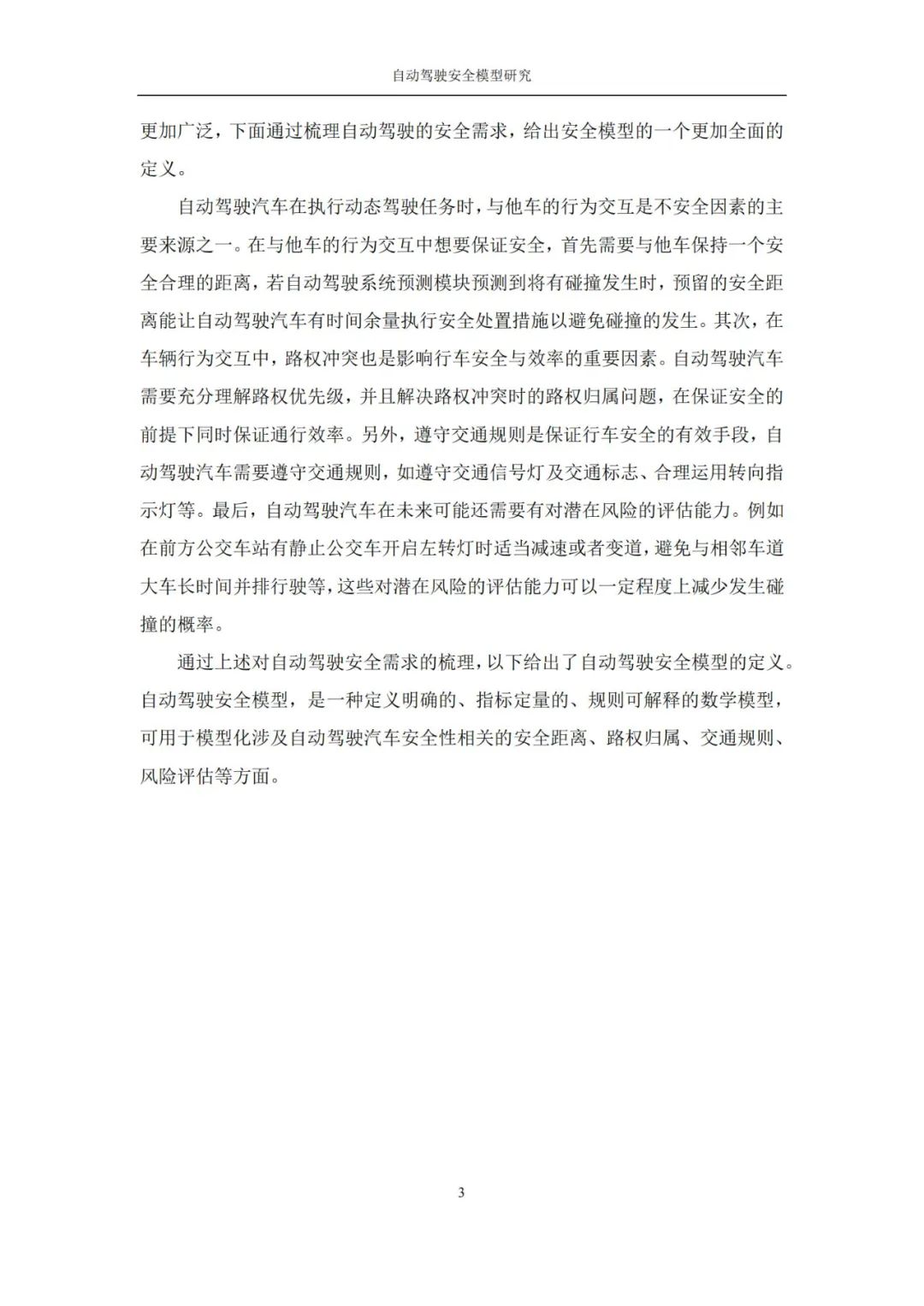
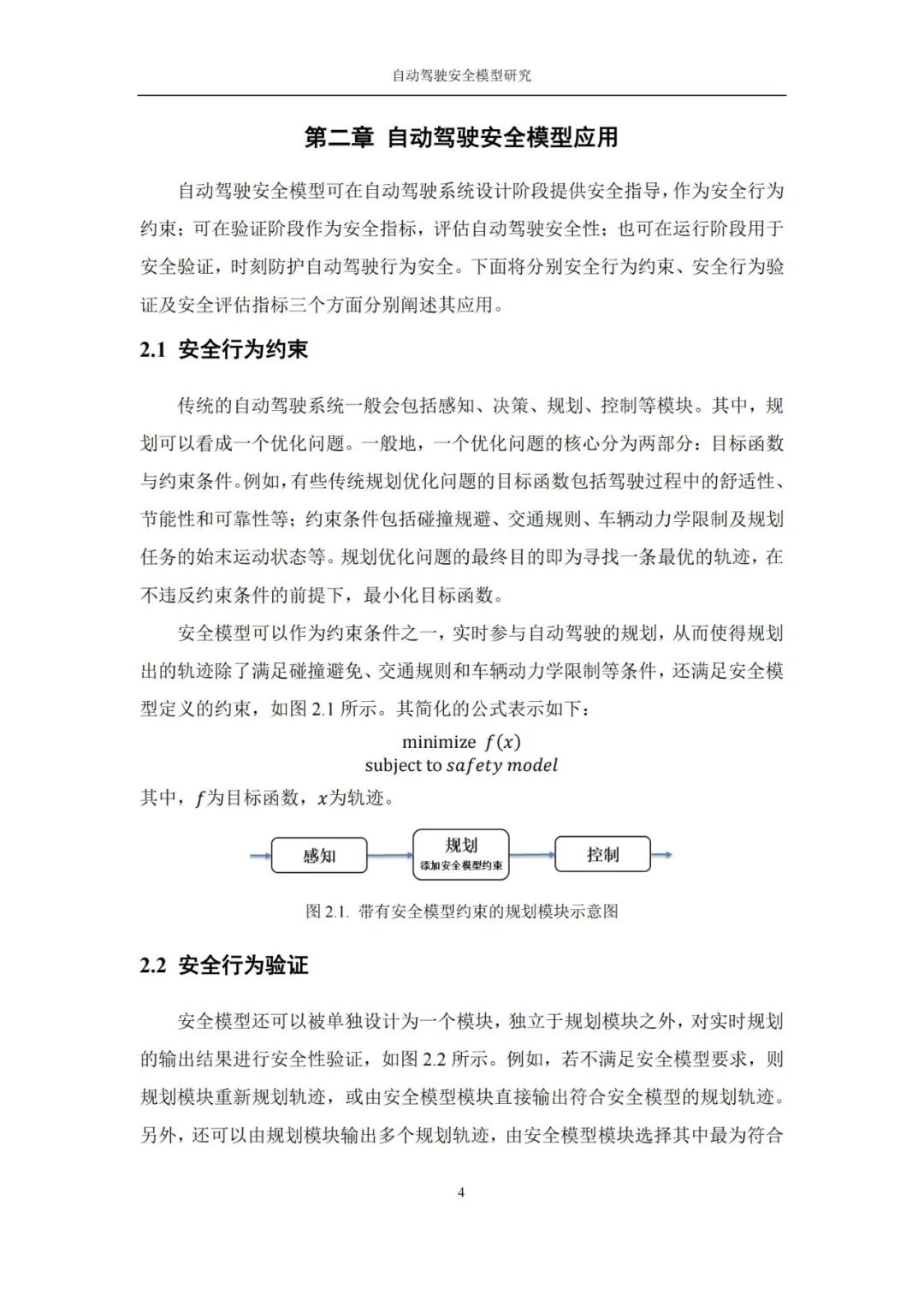
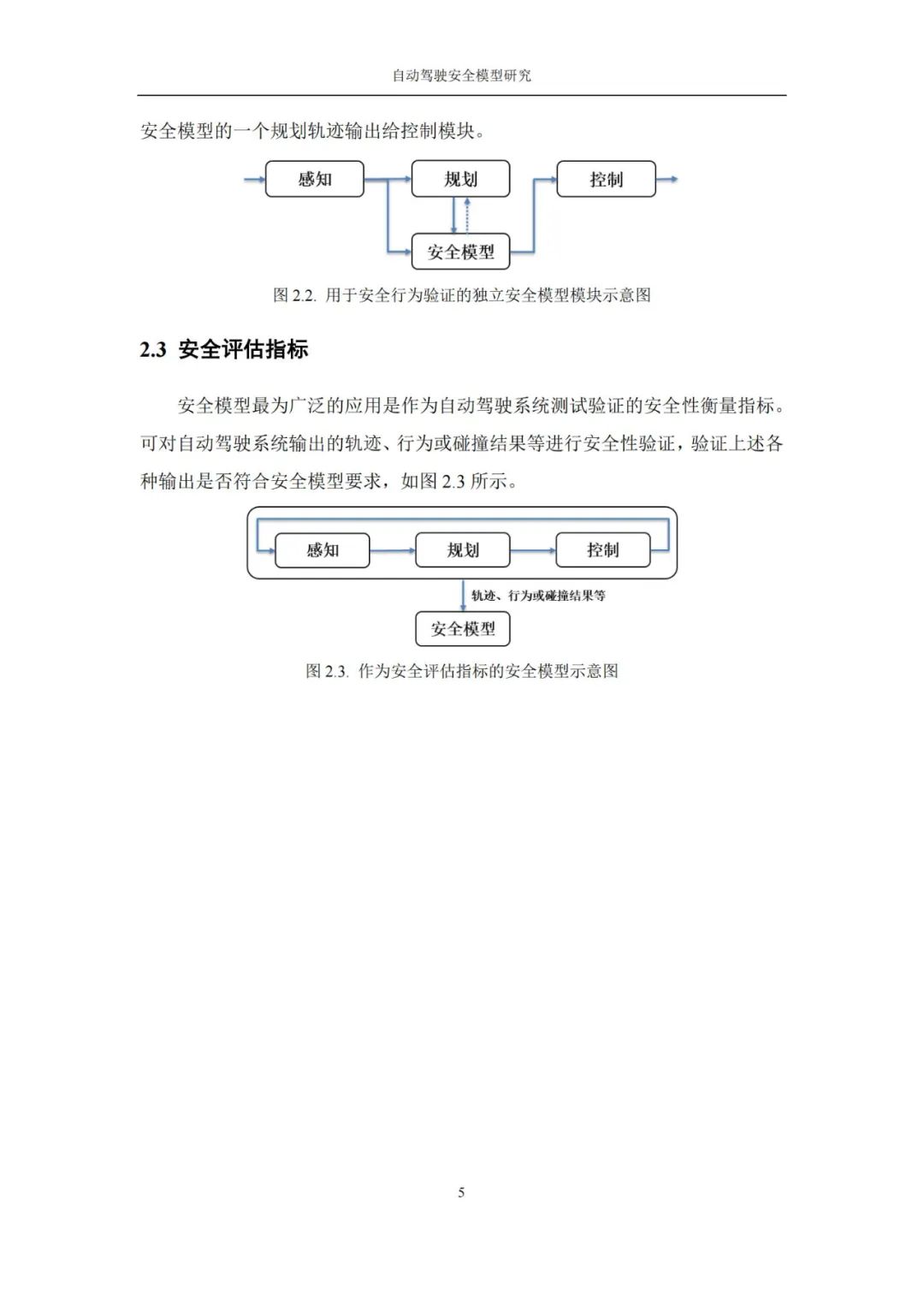
自动驾驶安全模型应用:在自动驾驶系统设计阶段,安全模型作为约束条件参与规划,确保轨迹满足安全要求;验证阶段,可独立验证规划结果,选择安全轨迹;同时,它还是测试验证的安全性衡量指标,用于验证系统输出是否符合安全标准。
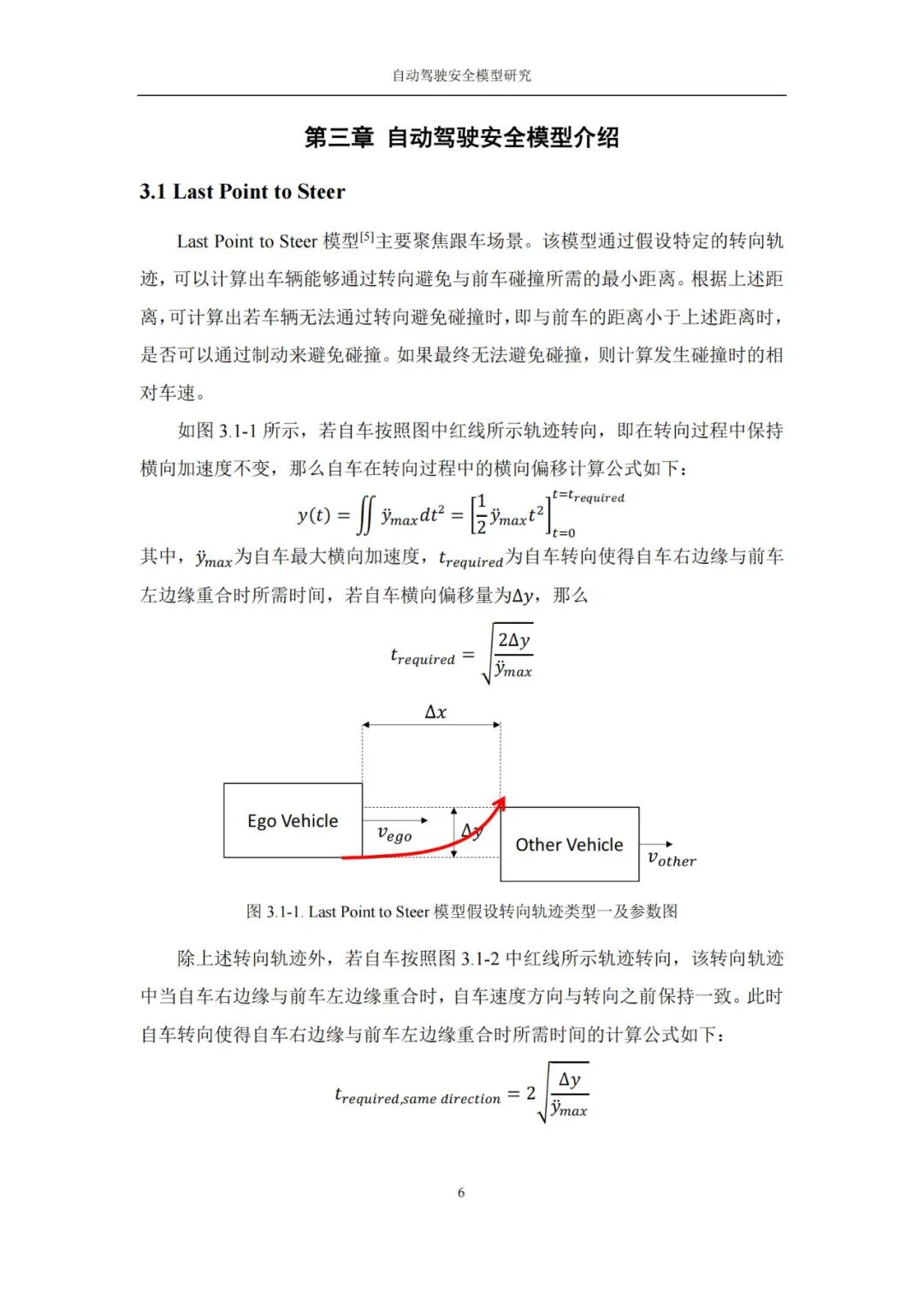
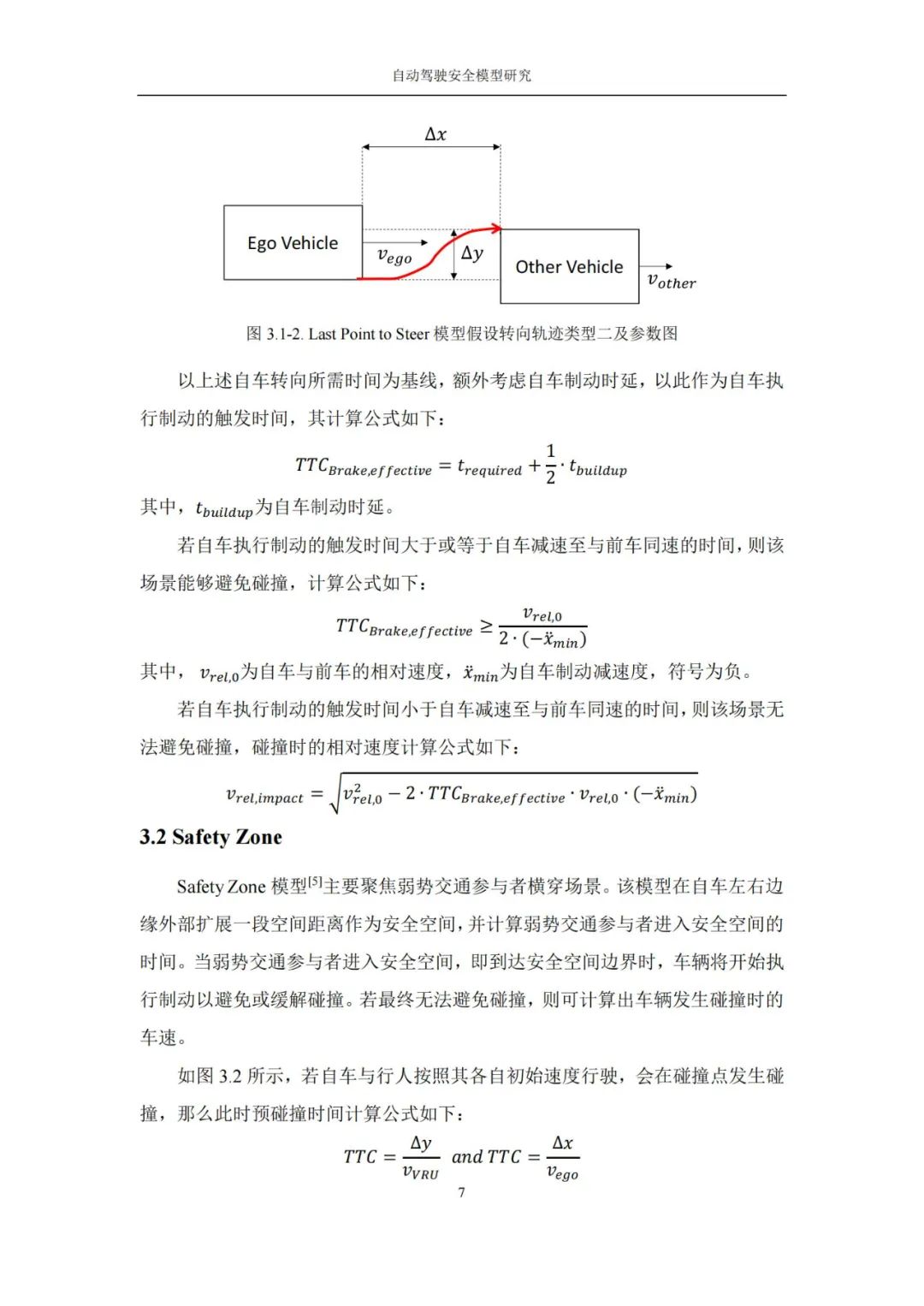
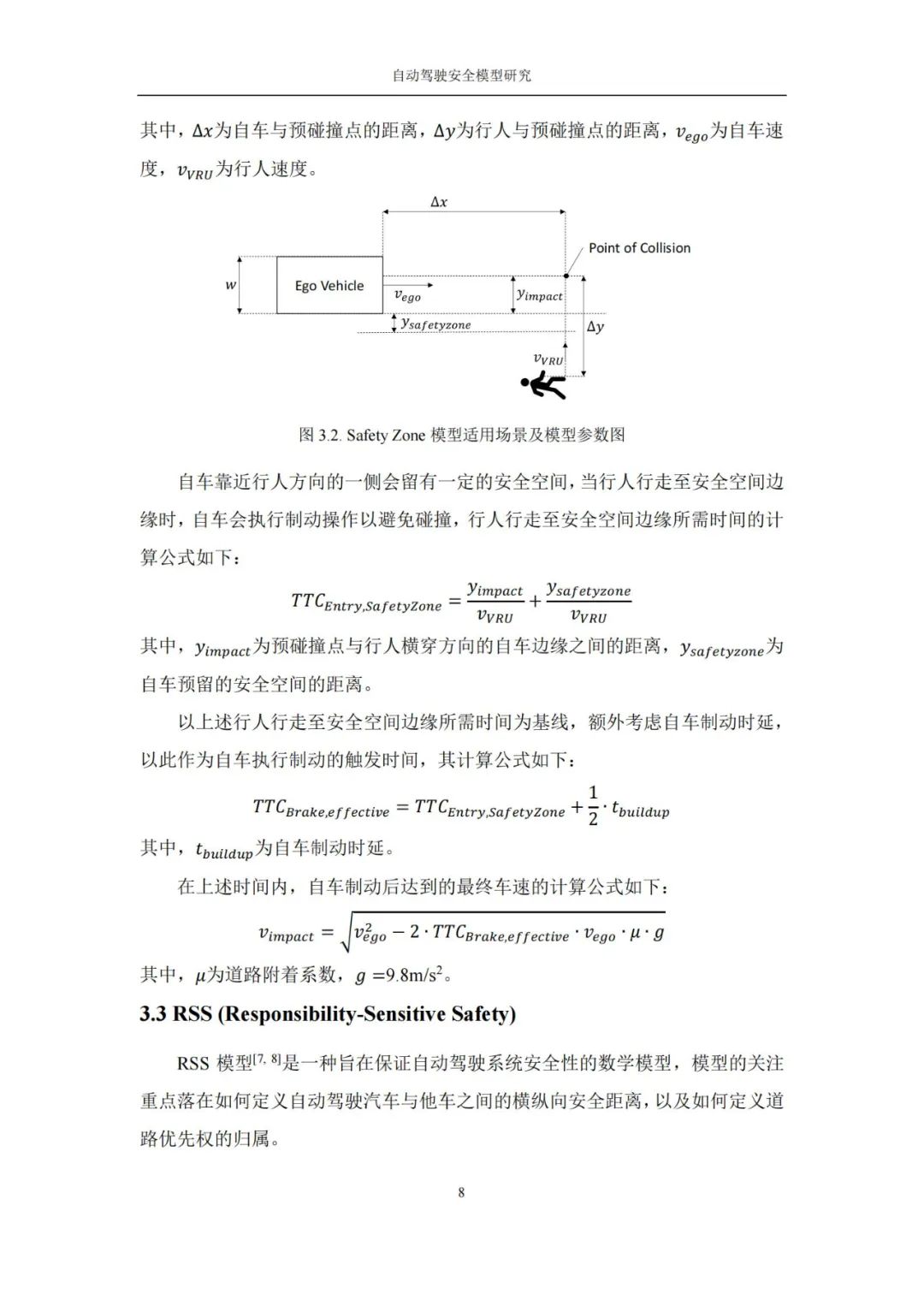
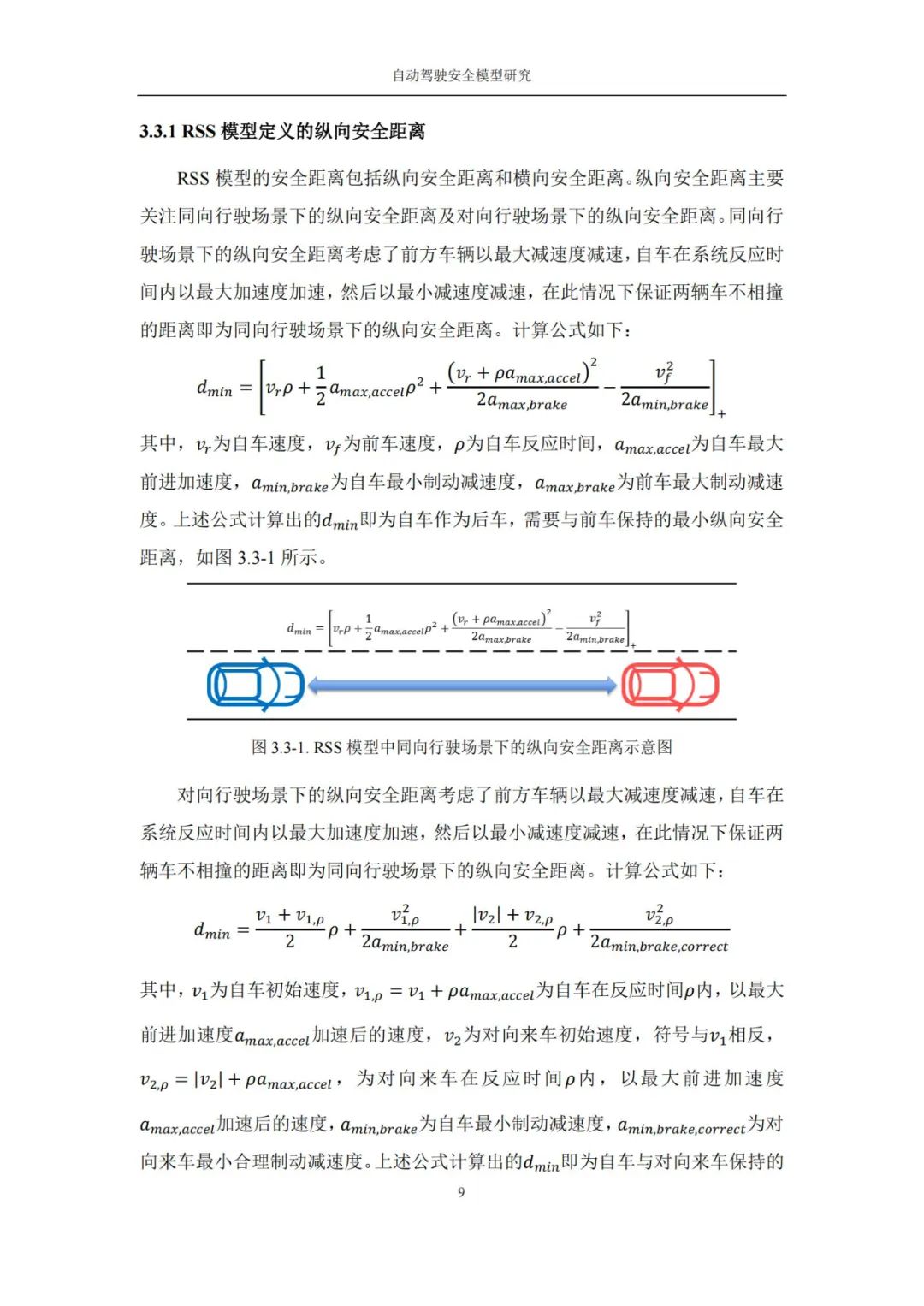
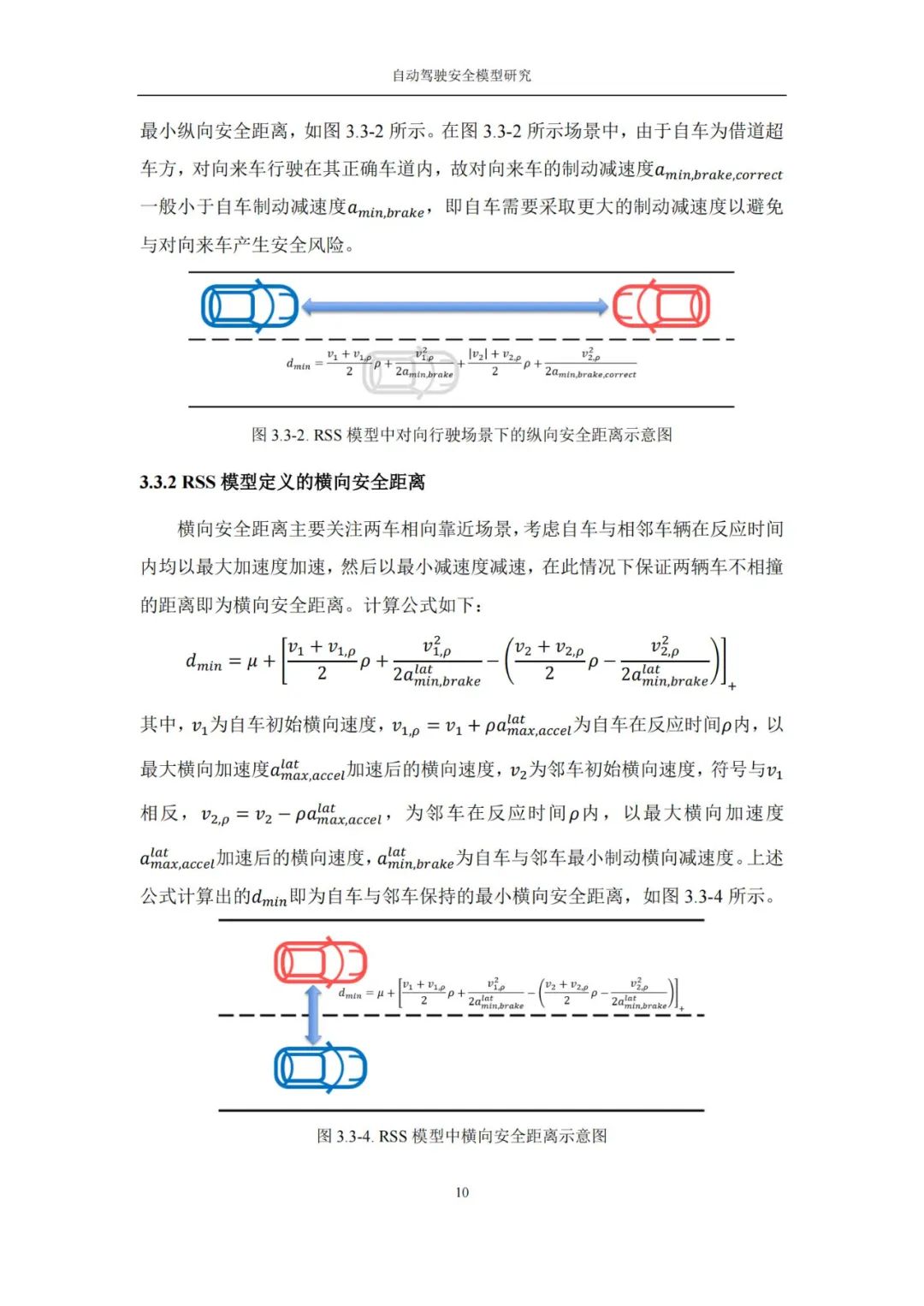
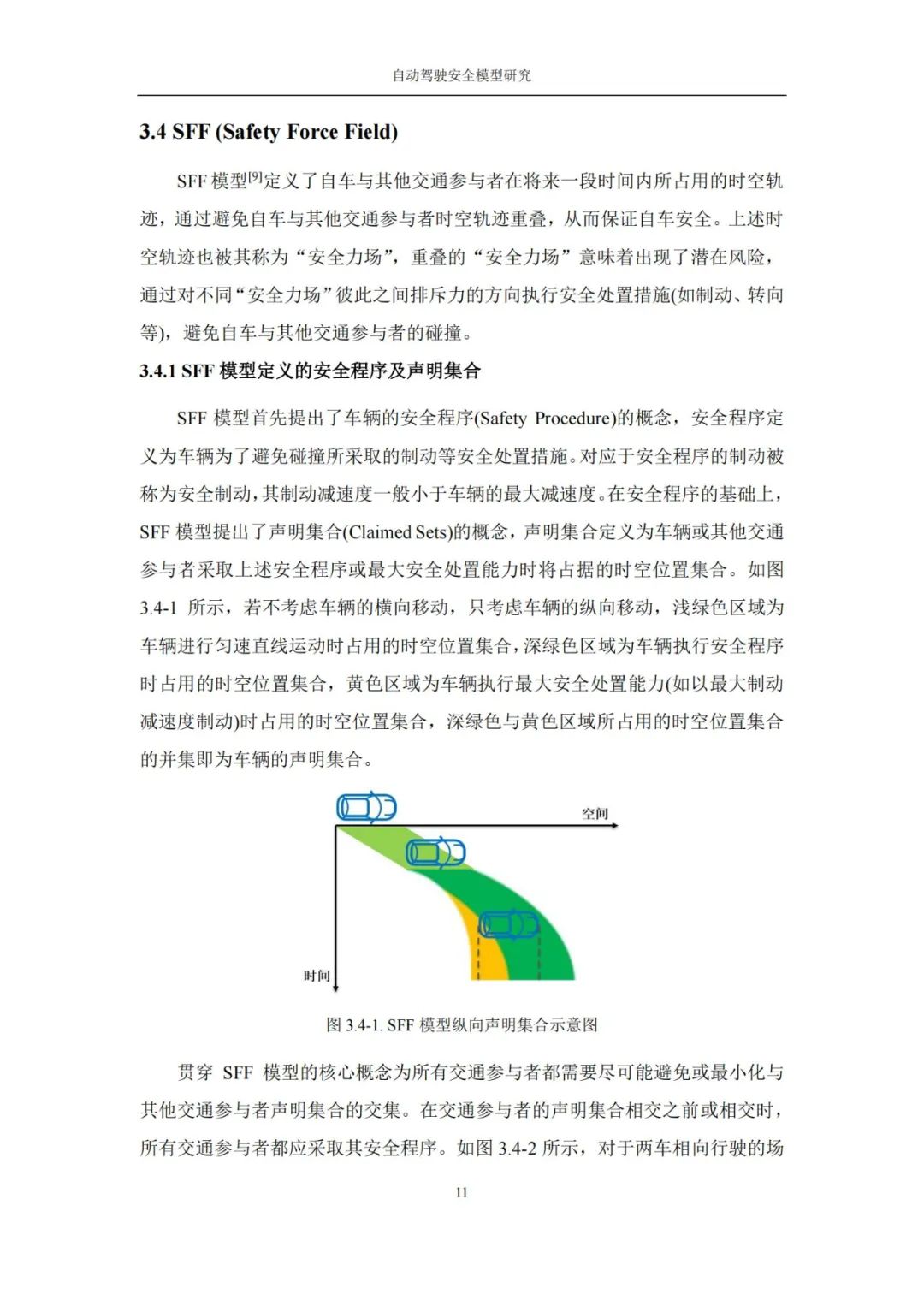
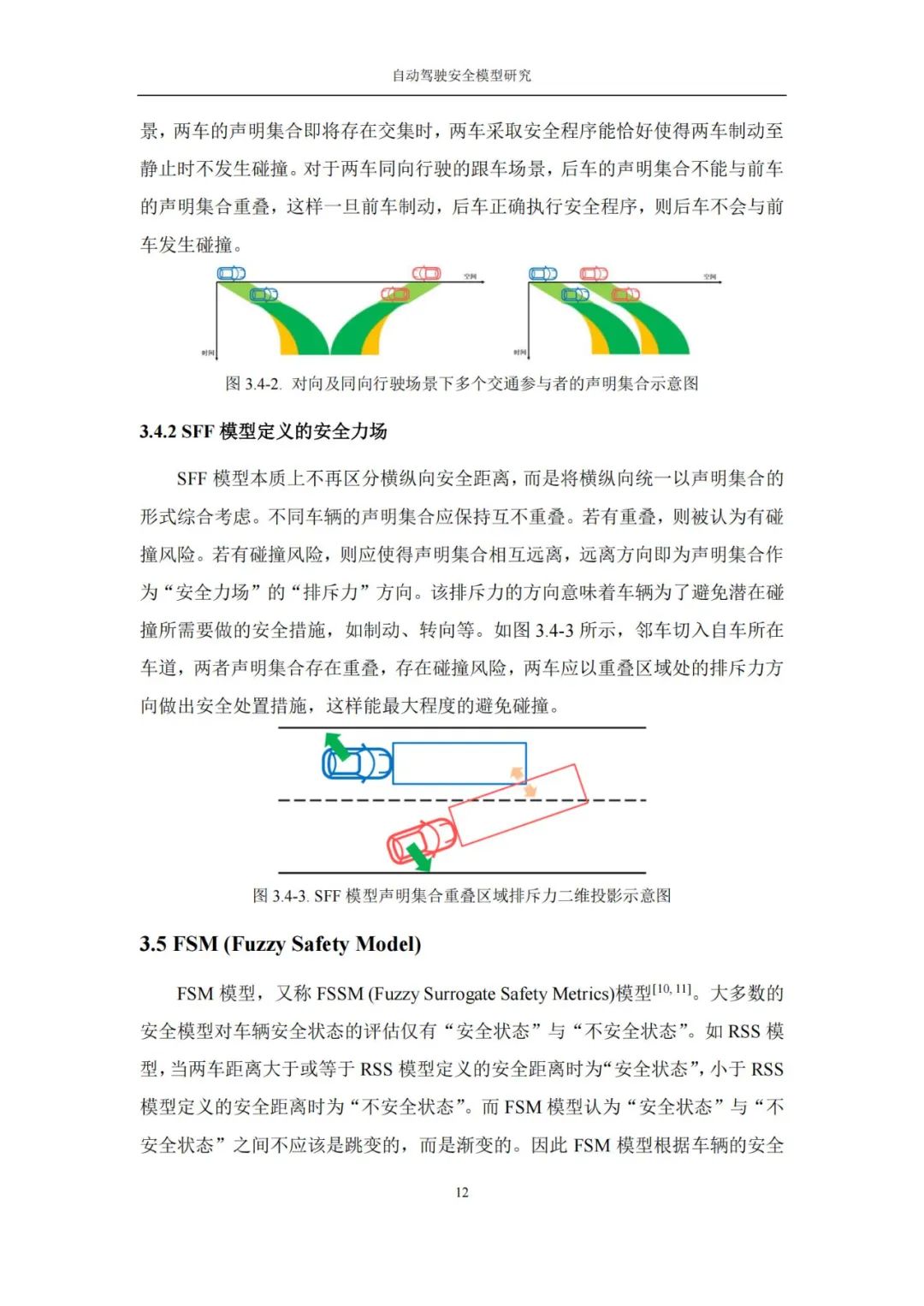
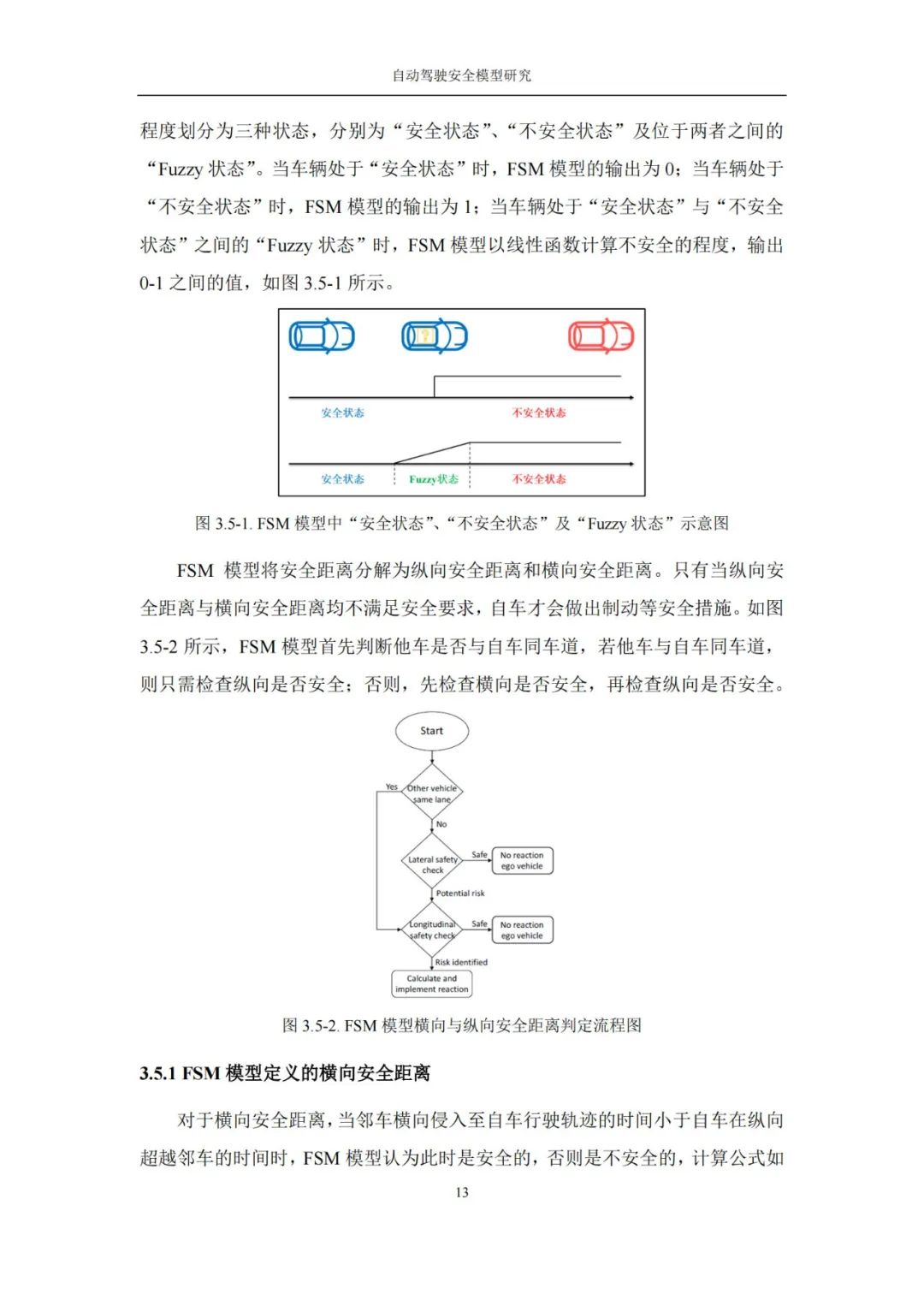
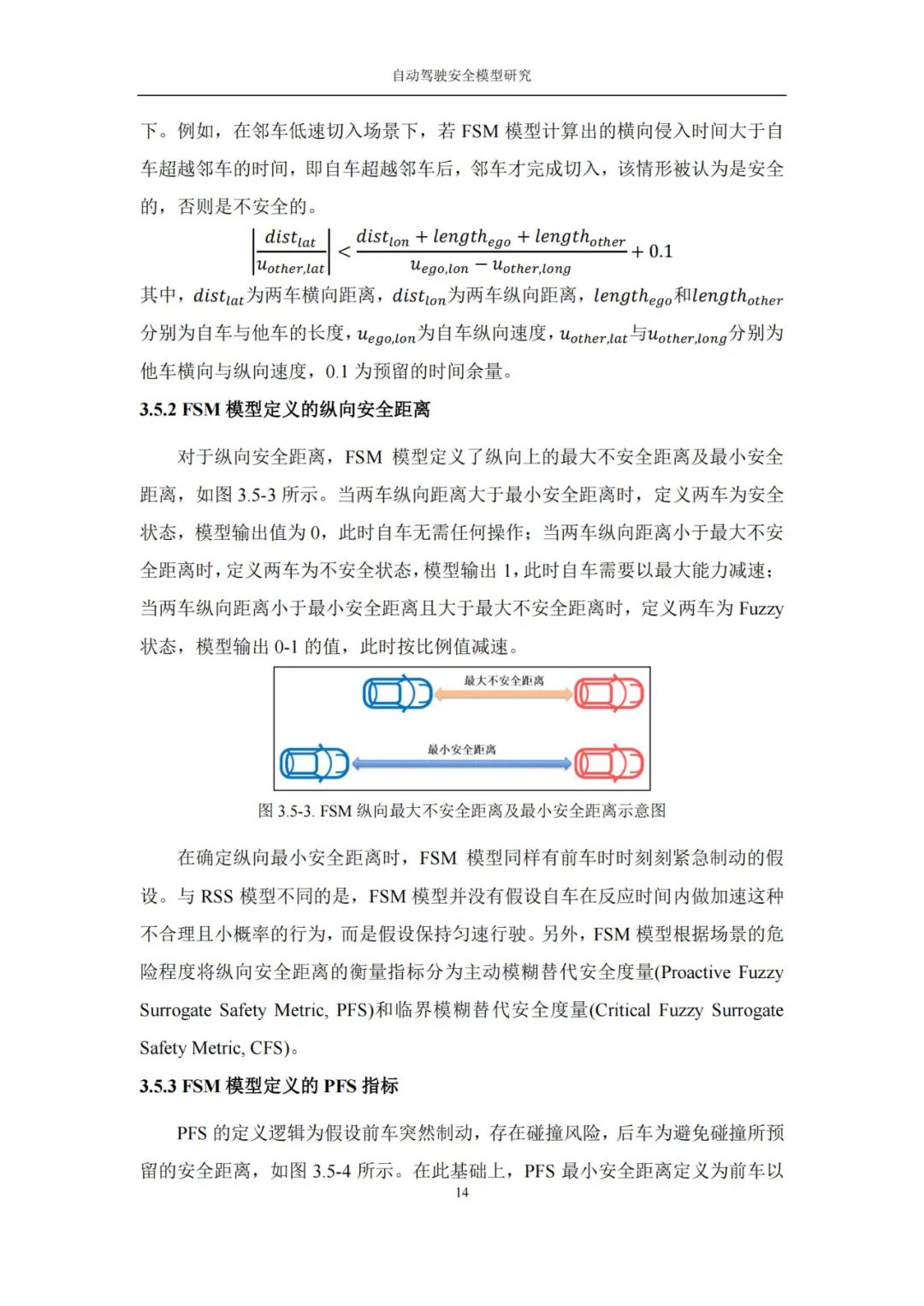
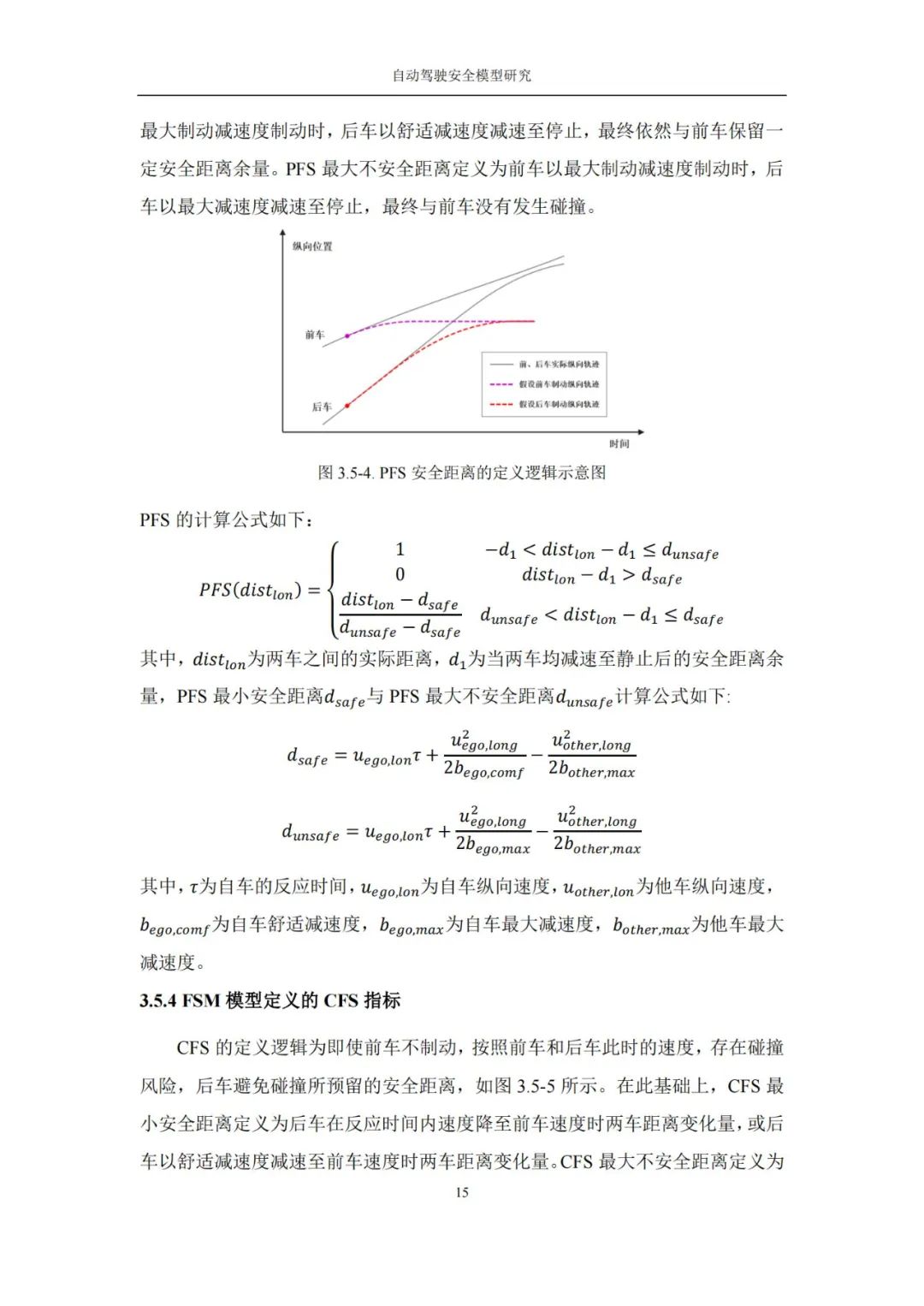
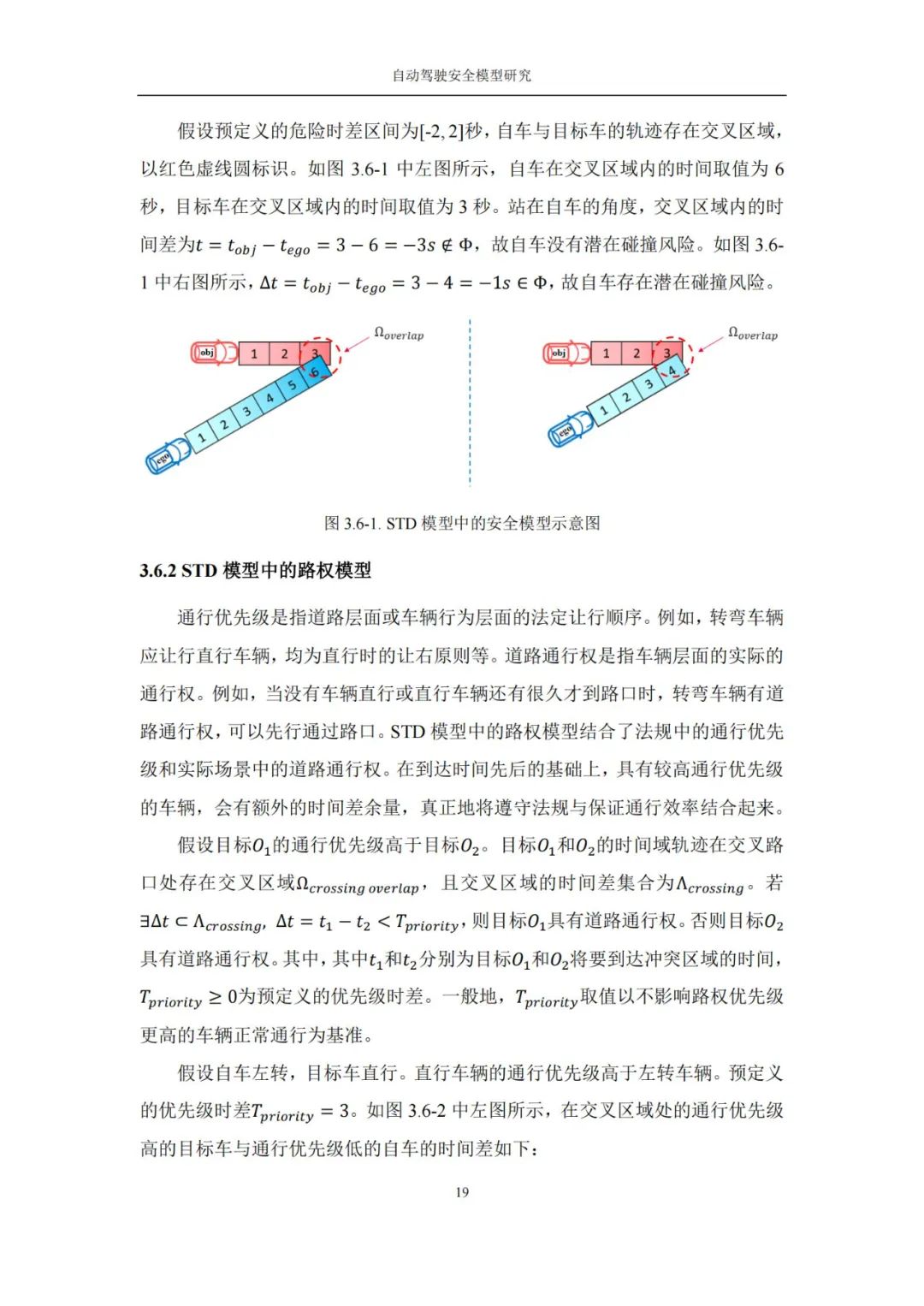
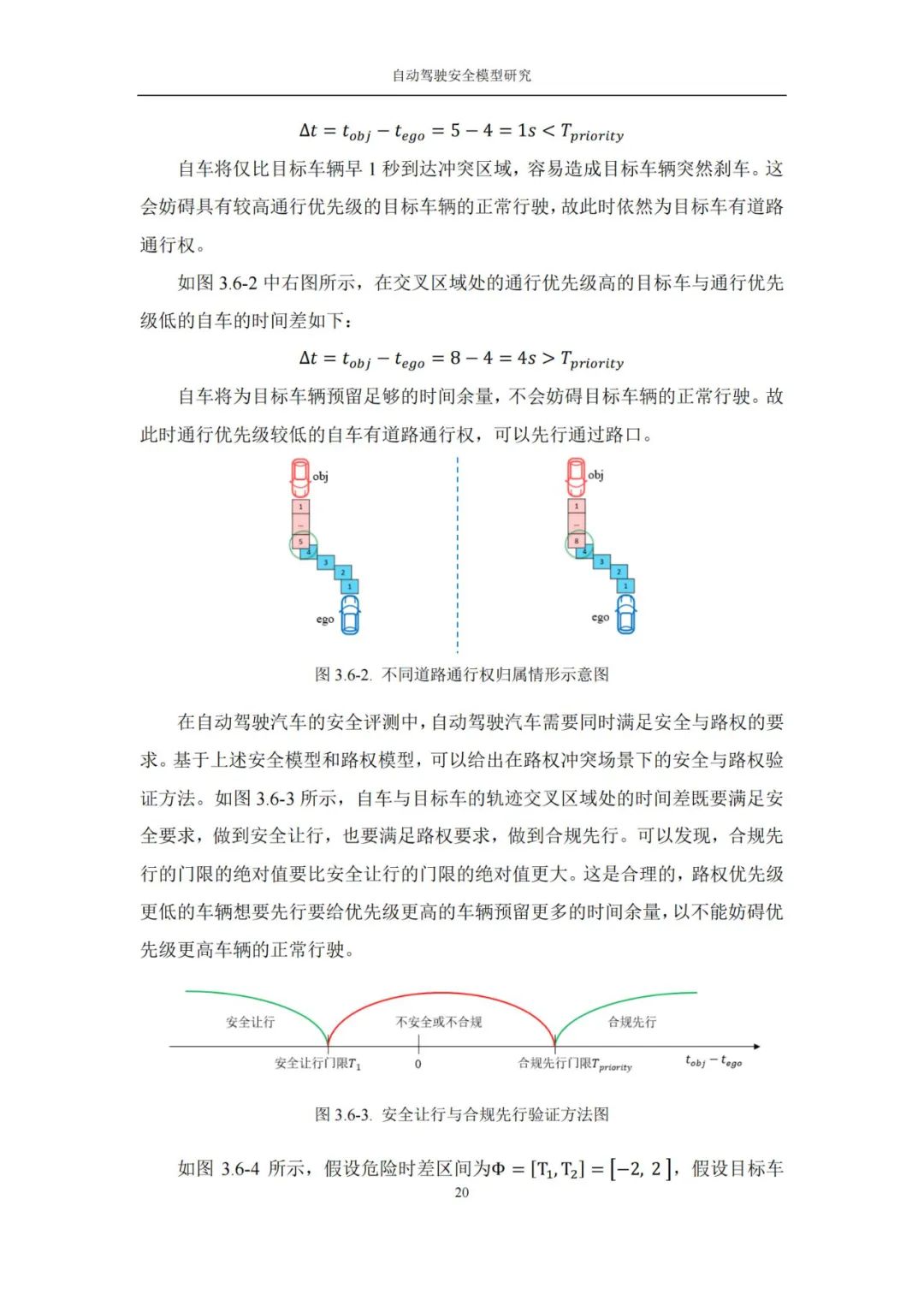
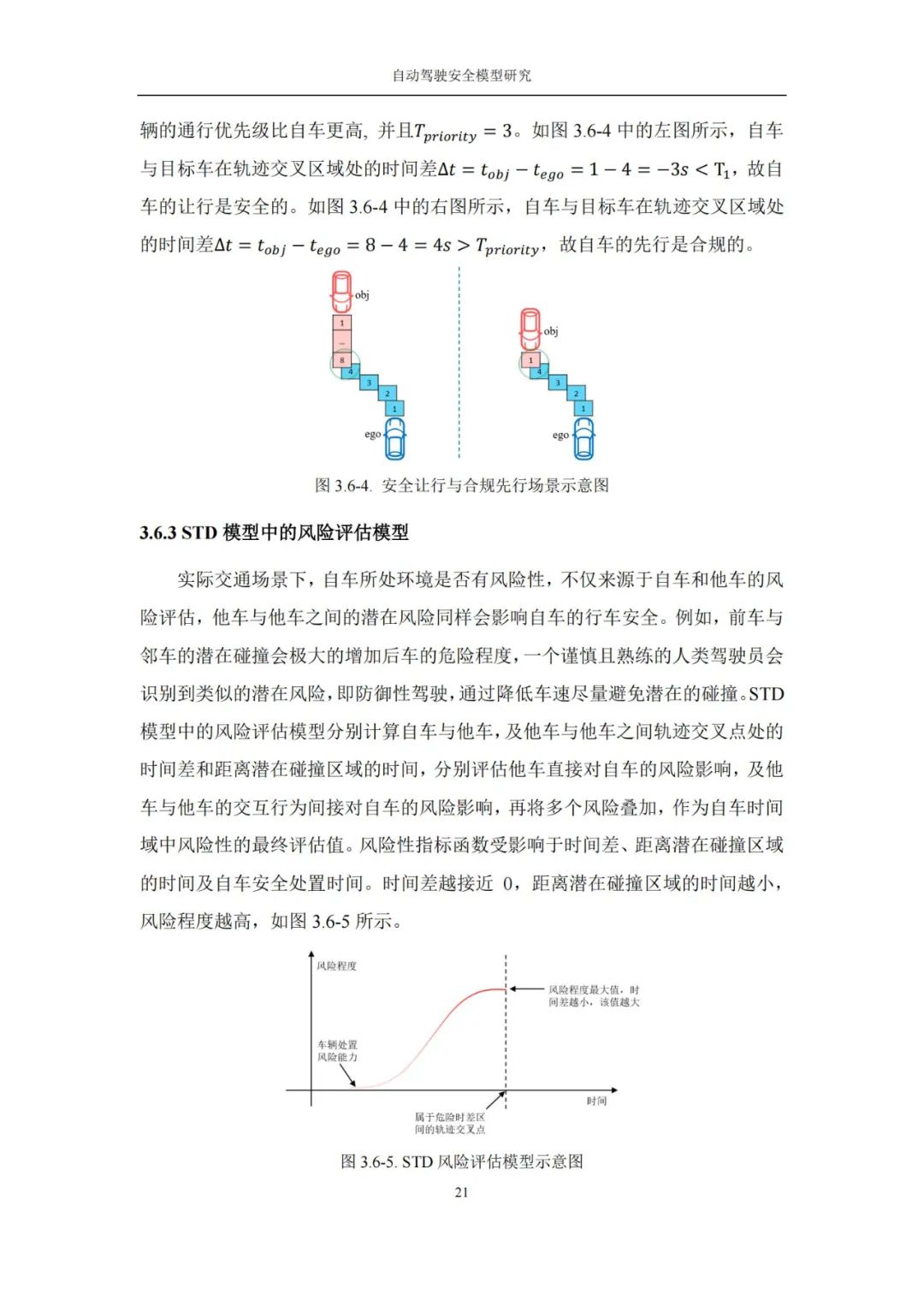
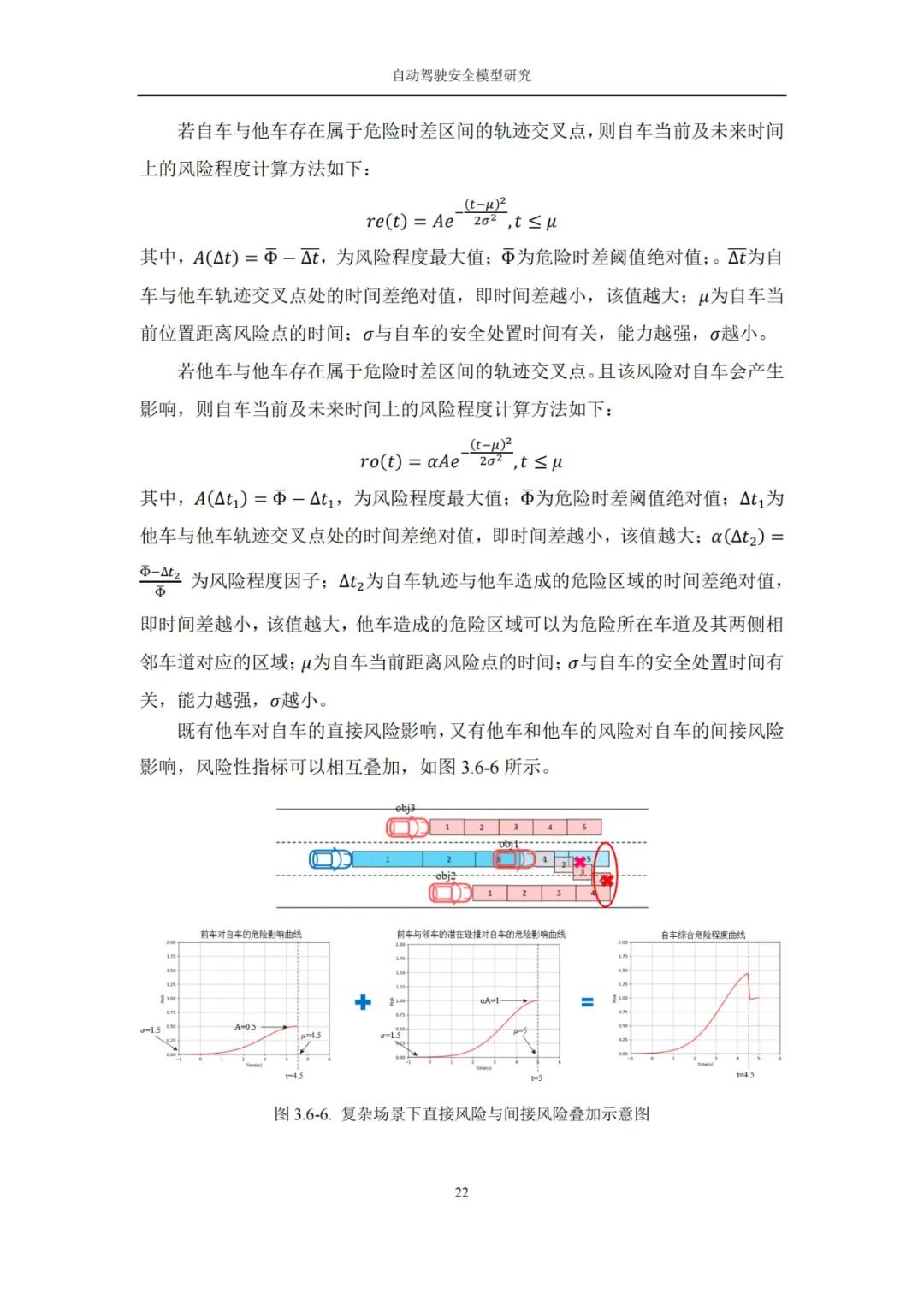
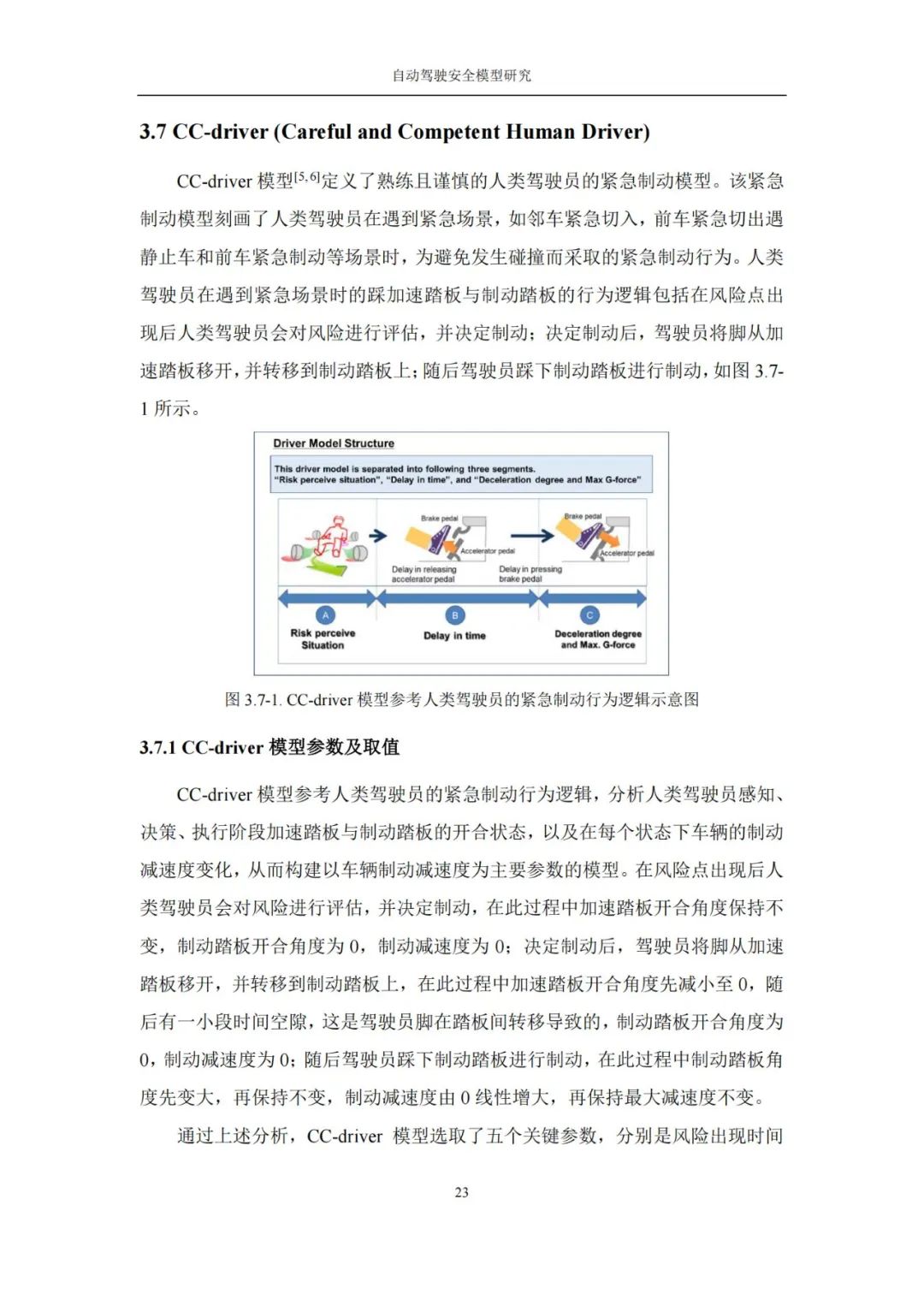
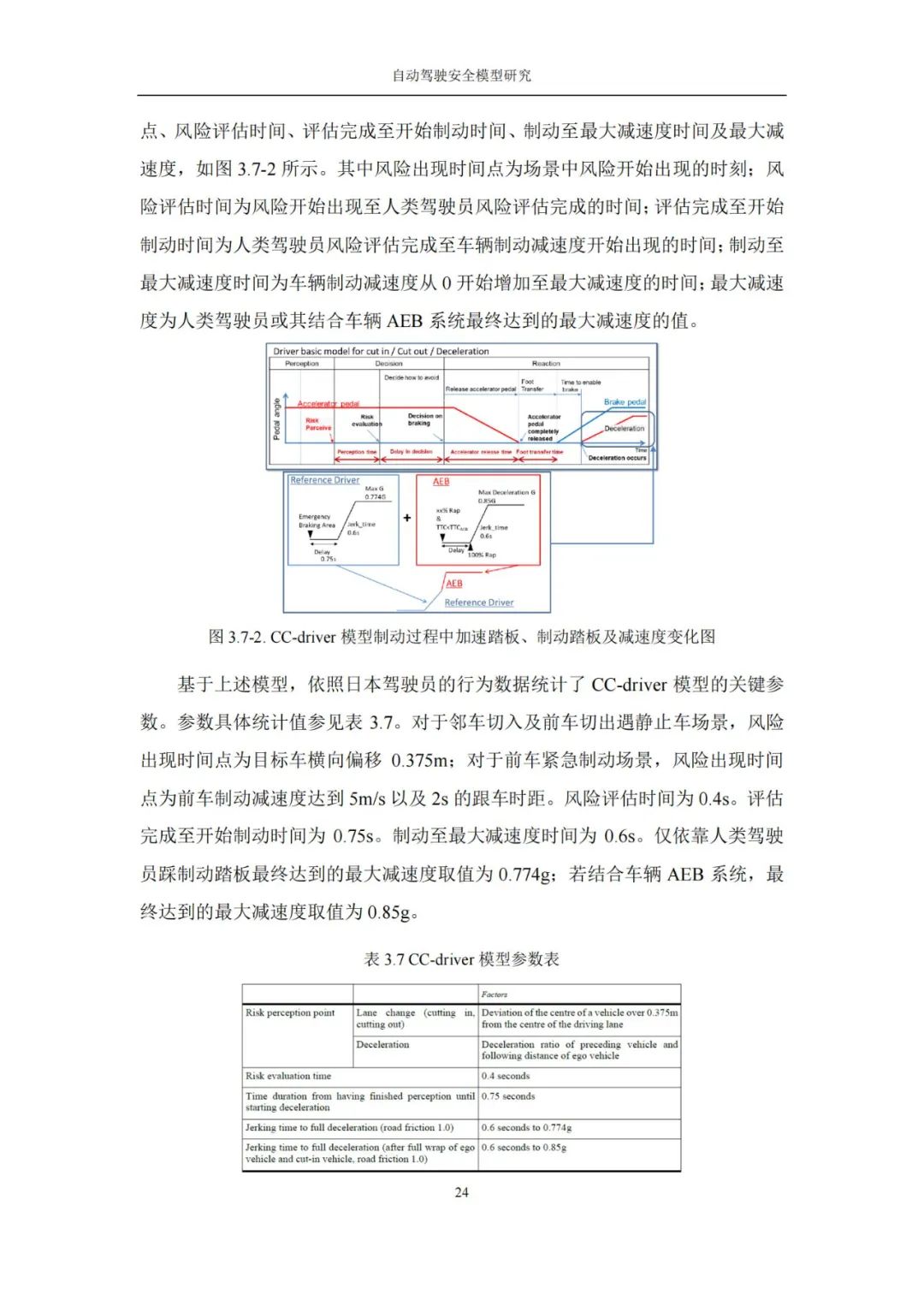
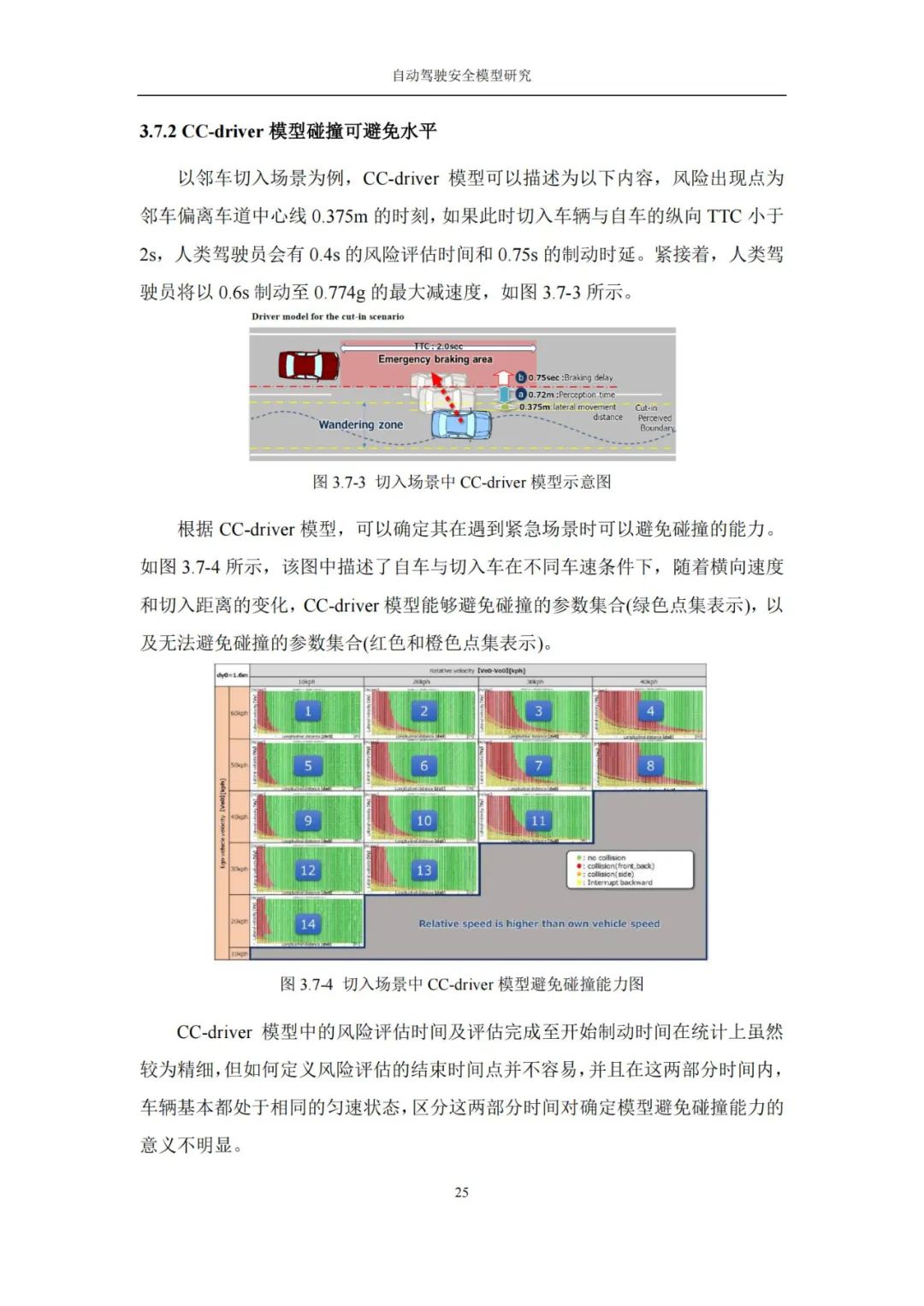
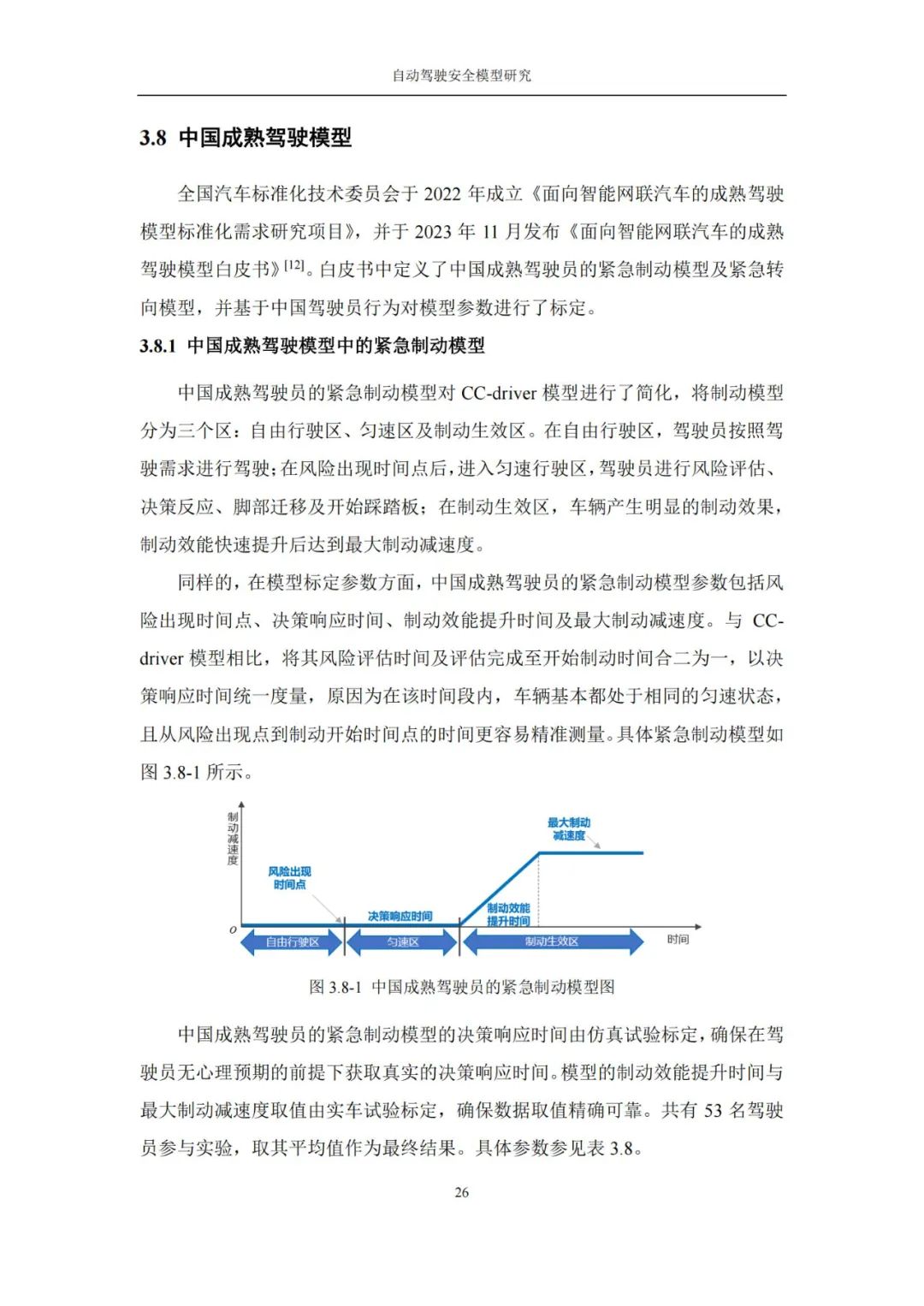
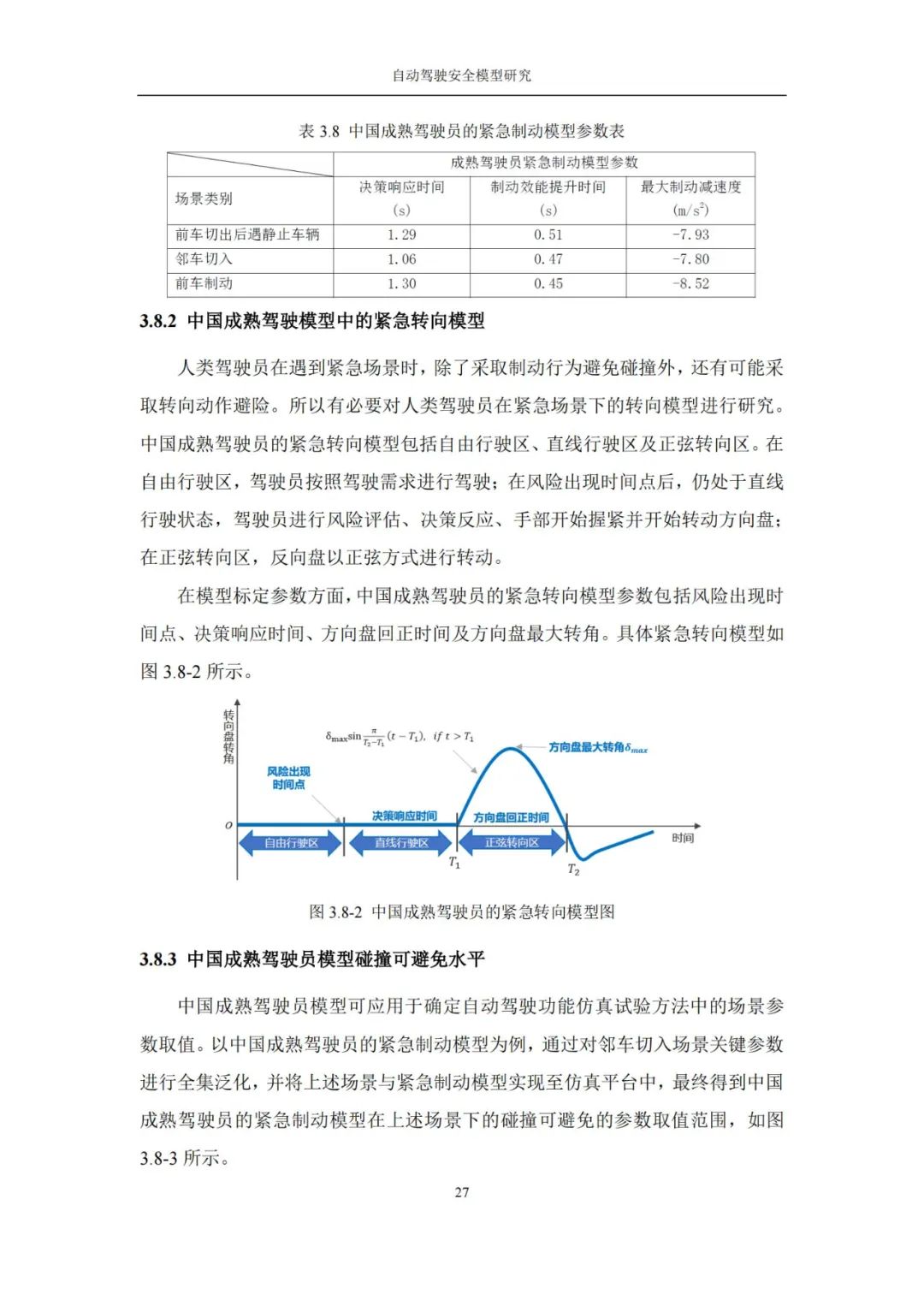
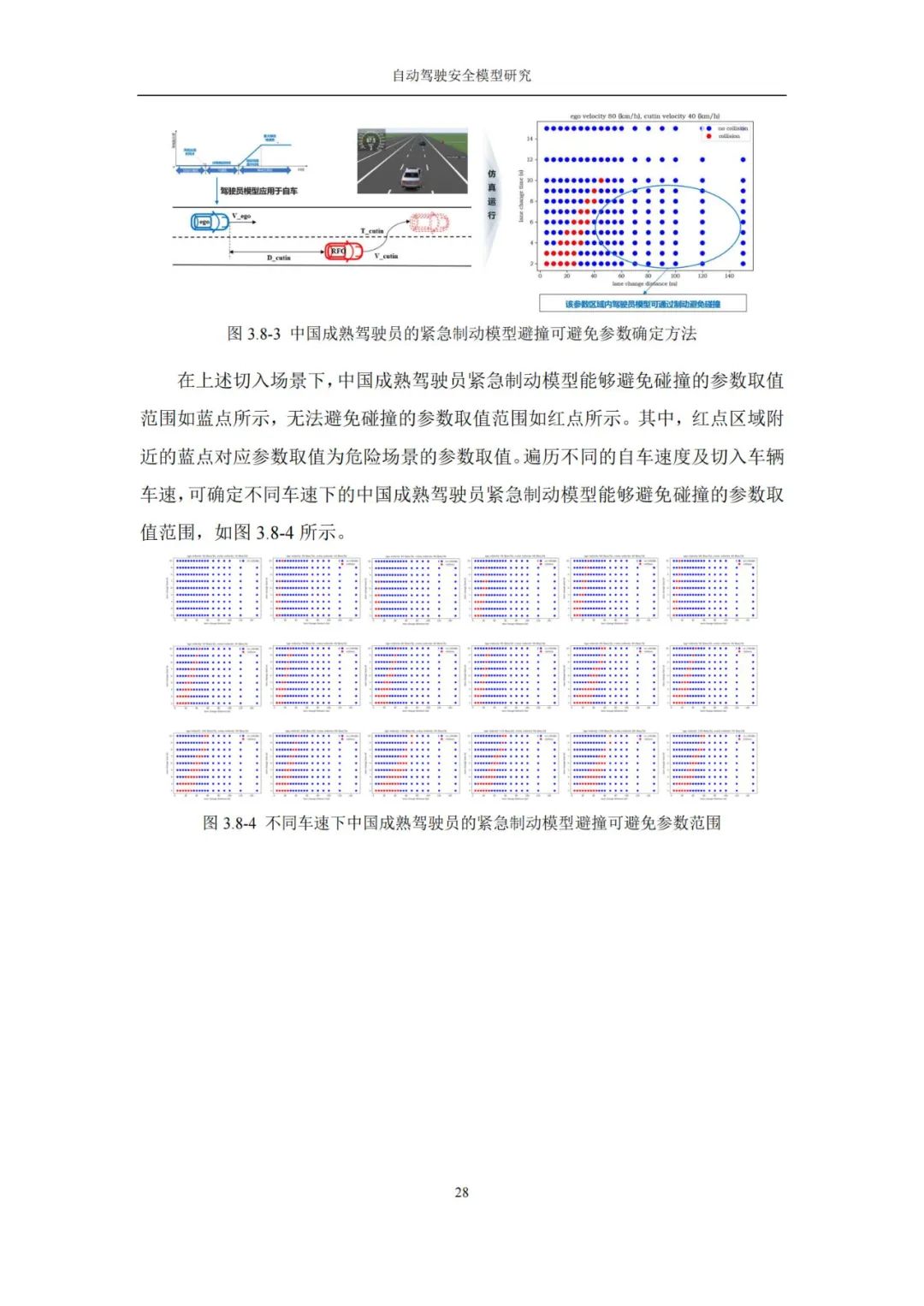
自动驾驶安全模型介绍:介绍了 Last Point to Steer、Safety Zone 等 8 种模型。如 Last Point to Steer 聚焦跟车场景,计算避免碰撞的最小距离和相对车速;RSS 定义了自动驾驶汽车与他车的横纵向安全距离及道路优先权;中国成熟驾驶模型基于中国驾驶员行为,包含紧急制动和转向模型,对自动驾驶功能仿真试验有指导意义。
自动驾驶安全模型展望:随着自动驾驶技术发展,安全模型的作用愈发重要。未来需深入研究模型及其应用场景,确保模型符合相关要求;确定应用方法,标准化模型或利用不同模型证明系统安全性;同时考虑模型的局限性,明确适用范围,挑选关键场景测试。
点击文后阅读原文,可获得下载资料的方法。
欢迎加入智能交通技术群!扫码进入。

点击文后阅读原文,可获得下载资料的方法。
联系方式:微信号18515441838


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









