







单片机模拟SPI总线-----深入理解SPI总线协议
SPI(Serial Peripheral Interfacer 串行外设接口)是摩托罗拉公司推出的一种同步串行通讯接口,用于微处理器臌控制器和外围扩展芯片之间的串行连接,现已发展成为一种工业标准,目前,各半导体公司推出了大量的带有SPI接口的具有各种各样功能的芯片,如RAM,EEPROM,FlashROM,A/D转换器、D/A转换器、LED/LED显示驱动器、I/O接口芯片、实时时钟、UART收发器等等,为用户的外围扩展提供了极其灵活而价廉的选择。由于SPI总线接口只占用微处理器四个I/O口线,采用SPI总线接口可以简化电路没计,节省很多常规电路中的接口器件和I/O口线,提高设计的可靠性。
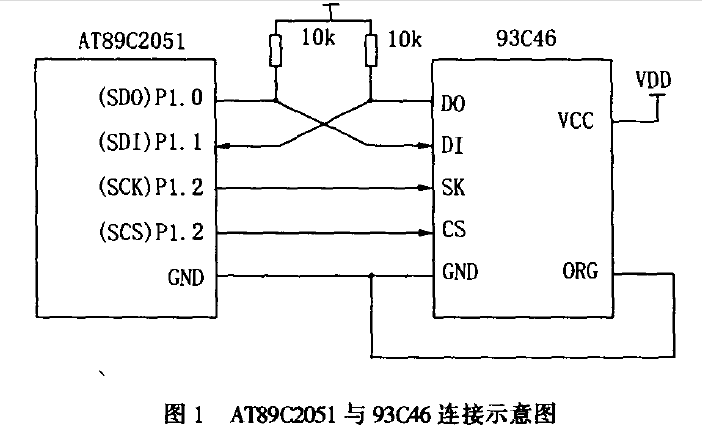
现以 AT89C205l单片机模拟SPI总线操作串行EEPROM 93CA6为例,如图1所示,介绍利用单片机的I/O口通过软件模拟SPI总线的实现方法。在这里,仅介绍读命令的时序和应用子程序。
现以 AT89C205l单片机模拟SPI总线操作串行EEPROM 93CA6为例,如图1所示,介绍利用单片机的I/O口通过软件模拟SPI总线的实现方法。在这里,仅介绍读命令的时序和应用子程序。
93C46存储器SPI总线的工作原理
93CA6作为从设备,其SPI接口使用4条I/O口线:串行时钟线(SK)、输出数据线DO、输入数据线DI和高电平有效的从机选择线CS。其数据的传输格式是高位(MSB)在前,低位(LsB)在后。93C46的SPI总线接口读命令时序如图2所示。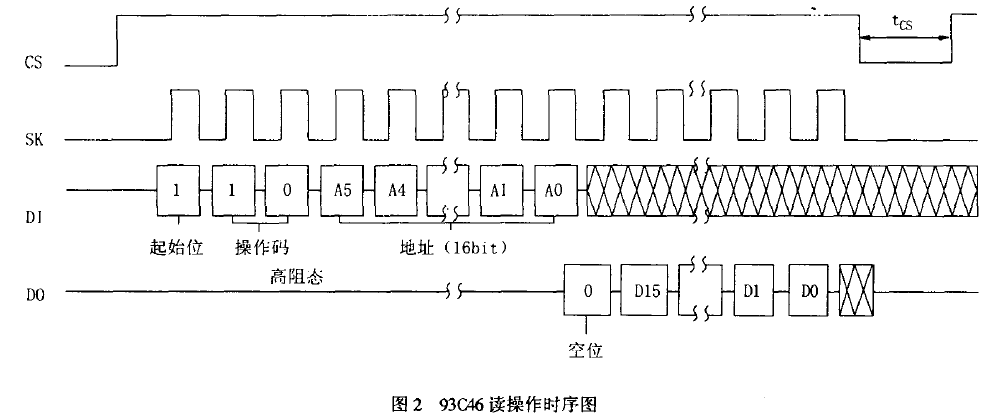
软件模拟SPI接口的实现方法
对于不带SPI串行总线接口的AT89C2051单片 机来说,可以使用软件来模拟SPI的操作,图1所示 为AT89C2051单片机与串行EEPROM 93C46的硬件 连接图,其中,P1.0模拟SPI主设备的数据输出端 SDO,P1.2模拟SPI的时钟输出端SCK,P1.3模拟 SPI的从机选择端SCS,P1.1模拟SPI的数据输入 SDI。上电复位后首先先将P1.2(SCK)的初始状态设置为0(空闲状态)。
读操作:AT89C2051首先通过P1.0口发送1位起始位(1),2位操作码(10),6位被读的数据地址(A5A4A3A2A1A0),然后通过P1.1口读1位空位(0),之后再读l6位数据(高位在前)。
写操作:AT89C2051首先通过P1.0口发送1位起始位(1),2位操作码(01),6位被写的数据地址(A5A4A3A2A1A0),之后通过P1.0口发送被写的l6位数据(高位在前),写操作之前要发送写允许命令,写之后要发送写禁止命令。
写允许操作(WEN)):写操作首先发送1位起始位(1),2位操作码(00),6位数据(11XXXX)。
写禁止操作(WDS)):写操作首先发送1位起始位(1),2位操作码(00),6位数据(00XXXX)。
下面介绍用C51模拟SPI的子程序。
- //首先定义好I/O口
- sbit SDO=P1^0;
- sbit SDI=P1^1;
- sbit SCK=P1^ 2;
- sbit SCS=P1^3;
- sbit ACC_7= ACC^7;
- unsigned int SpiRead(unsigned char add)
- {
- unsigned char i;
- unsigned int datal6;
- add&=0x3f;/*6位地址*/
- add |=0x80;/*读操作码l0*/
- SDO=1;/*发送1为起始位*/
- SCK=0;
- SCK=1;
- for(i=0;<8;i++)/*发送操作码和地址*/
- {
- if(add&0x80==1)
- SDO=1;
- else
- SDO=0;
- SCK=0;/*从设备上升沿接收数据*/
- SCK=1;
- add<<= 1;
- }
- SCK=1;/*从设备时钟线下降沿后发送数据,空读1位数据*/
- SCK=0;
- datal6<<= 1;/*读16位数据*/
- for(i=0;<16;i++)
- {
- SCK= 1;
- _nop_();
- if(SDI==1)
- datal6|=0x01;
- SCK =0;
- datal6< < =1;
- }
- return datal6;
- }
















 25万+
25万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









