







3D点云点云分割、目标检测、分类
原标题Deep Learning for 3D Point Clouds: A Survey
作者Yulan Guo, Hanyun Wang, Qingyong Hu, Hao Liu, Li Liu, and Mohammed Bennamoun
原文参考链接:https://arxiv.org/abs/1912.12033
导读
3D点云学习( Point Clouds)作为近年来的研究热点之一,受到了广泛关注,每年在各大会议上都有大量的相关文章发表。当前,点云上的深度学习变得越来越流行,人们提出了许多方法来解决这一领域的不同问题。国防科技大学郭裕兰老师课题组新出的这篇论文对近几年点云深度学习方法进行了全面综述,是第一篇全面涵盖多个重要点云相关任务的深度学习方法的综述论文,包括三维形状分类、三维目标检测与跟踪、三维点云分割等,并对点云深度学习的机制和策略进行全面的归纳和解读,帮助读者更好地了解当前的研究现状和思路。也提供了现有方法在几个可公开获得的数据集上的全面比较,最后也介绍了未来的研究方向。
对于3D点云,数据正在迅速增长。大有从2D向3D发展的趋势,比如在opencv中就已经慢慢包含了3D点云的处理的相关模块,在数据方面点云的获取也是有多种渠道, 无论是源于CAD模型还是来自LiDAR传感器或RGBD相机的扫描点云,无处不在。 另外,大多数系统直接获取3D点云而不是拍摄图像并进行处理。因此,在深度学习大火的年代,应该如何应用这些令人惊叹的深度学习工具,在3D点云上的处理上达到对二维图像那样起到很好的作用呢?
3D点云应用深度学习面临的挑战。首先在神经网络上面临的挑战:
(1)非结构化数据(无网格):点云是分布在空间中的XYZ点。
没有结构化的网格来帮助CNN滤波器。
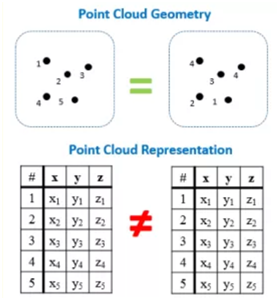
(2)不变性排列:点云本质上是一长串点(nx3矩阵,其中n是点数)。 在几何上,点的顺序不影响它在底层矩阵结构中的表示方式,例如,
相同的点云可以由两个完全不同的矩阵表示。 如下图所示:
(3)点云数量上的变化:在图像中,像素的数量是一个给定的常数,取决于相机。
然而,点云的数量可能会有很大的变化,这取决于各种传感器。
在点云数据方面的挑战:
(1)缺少数据:扫描的模型通常被遮挡,部分数据丢失。
(2)噪音:所有传感器都是嘈杂的。
有几种类型的噪声
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 6972
6972











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









