







机器人导航两篇顶级会议论文解析
一.一种用于四旋翼无人机室内自主导航的卷积神经网络特征检测算法
标题:A Convolutional Neural Network Feature Detection Approach
to Autonomous Quadrotor Indoor Navigation
作者:Adriano Garcia, Sandeep S. Mittal, Edward Kiewra and Kanad
Ghose
来源:2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
摘要
用于识别和定位室内结构特征点的目标检测技术,目前同样可以应用于四旋翼无人机室内自动导航。四旋翼无人机上搭载的前向单目相机拍摄的视频流会实时传输到外场的主机系统,并且在外场主机上运行了一套基于卷积神将网络的目标检测算法来识别一些特殊的特征点,例如死角、门和一些走廊的十字口。利用被识别物体周围边界框的像素级尺寸,使用支持向量回归(SVR)模型,可以准确估计到交叉口、终端和入口的距离,生成飞行控制命令,并且在飞行速度接近2m /s时实现一致的实时自主导航。
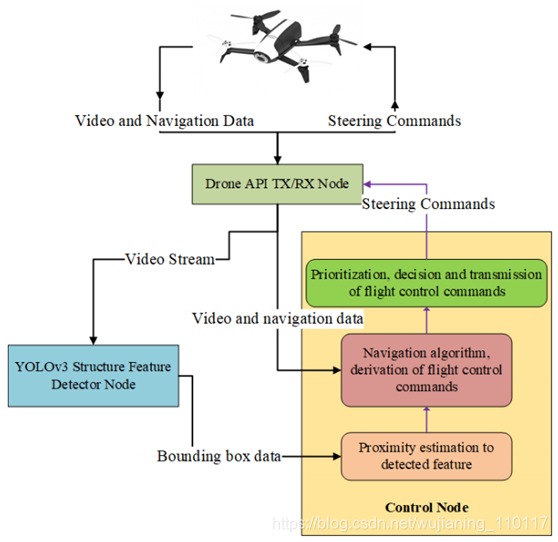
图1 区别于传统的图像处理方法,本文使用卷积神经网络来同时对结构特征点进行检测和定位,这使得我们的方法可以处理更多类的目标检测问
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 633
633











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









