







导航坐标系:东-北-天
载体坐标系:右-前-上
欧拉角定义:3-1-2旋转,(航向角-俯仰角-滚转角),其中航向角北偏西为正,范围【-pi pi】
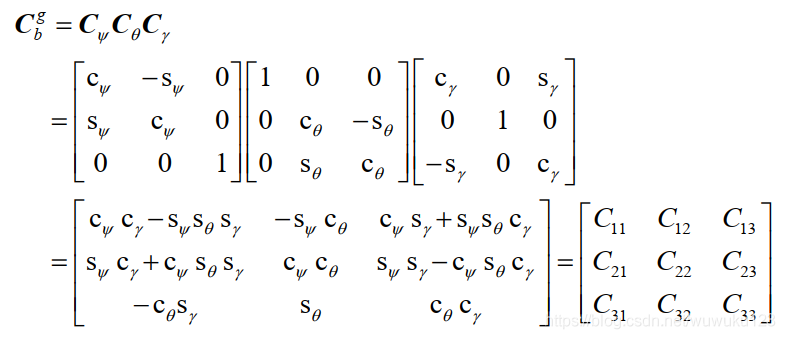
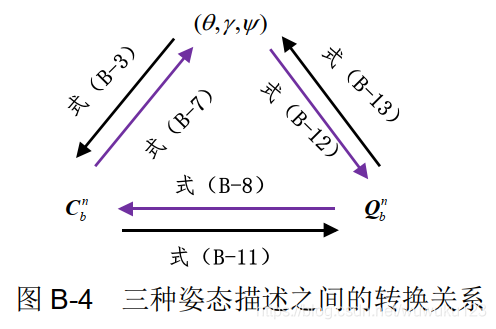
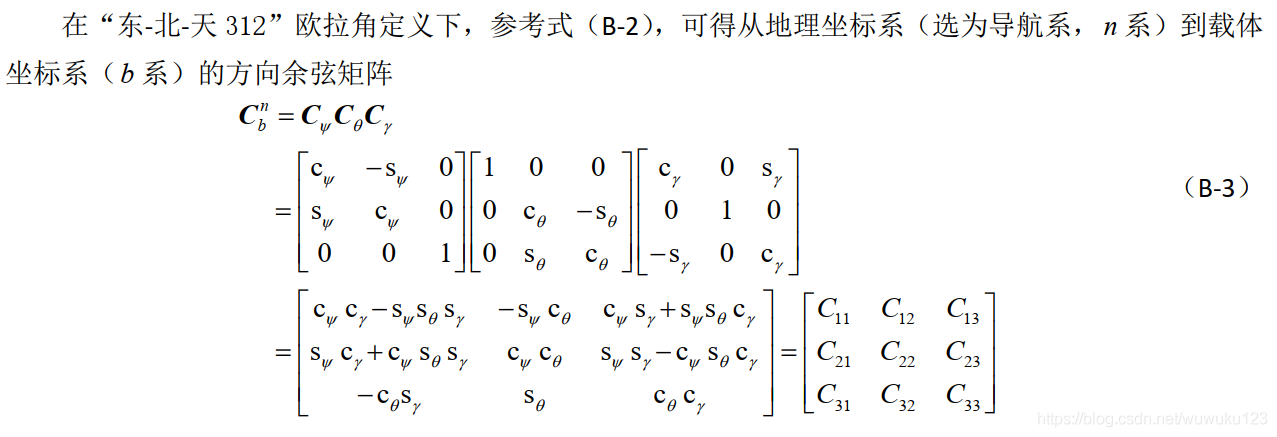
1、从欧拉角到方向余弦矩阵
从地理坐标系到载体坐标系的方向余弦矩阵为:
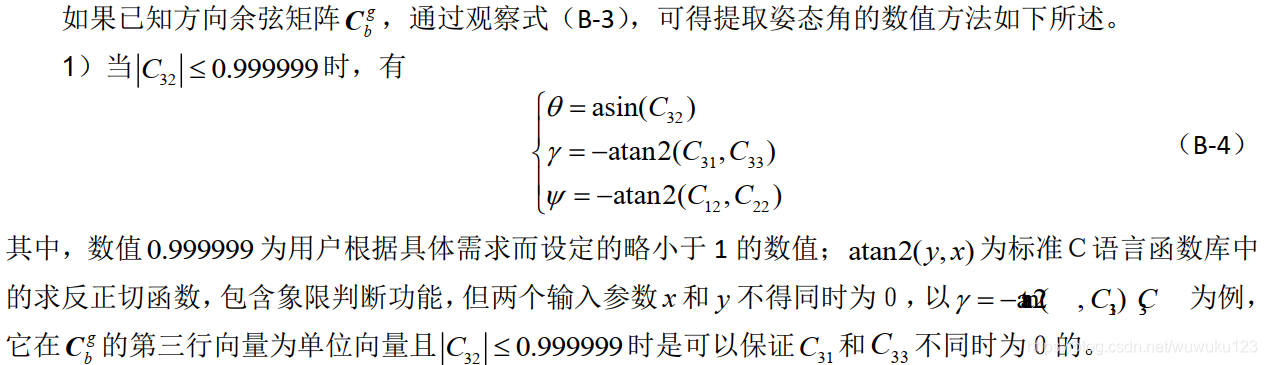
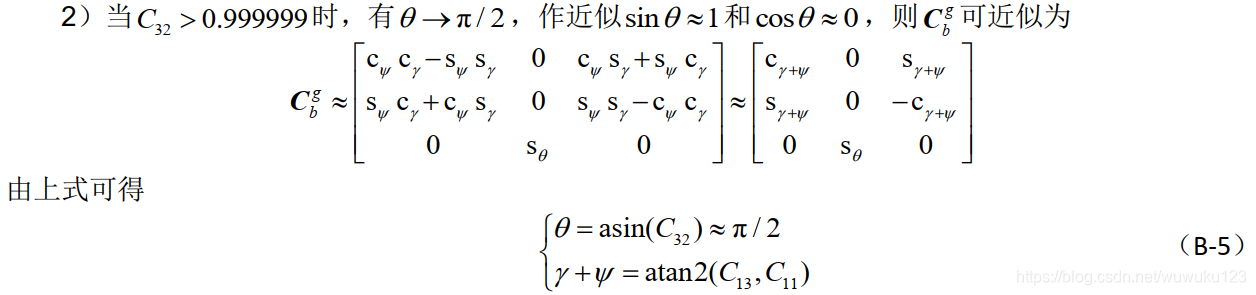
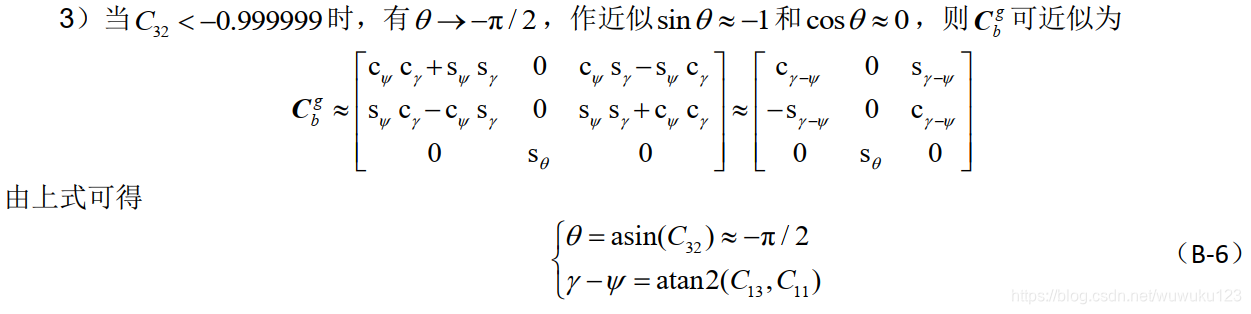
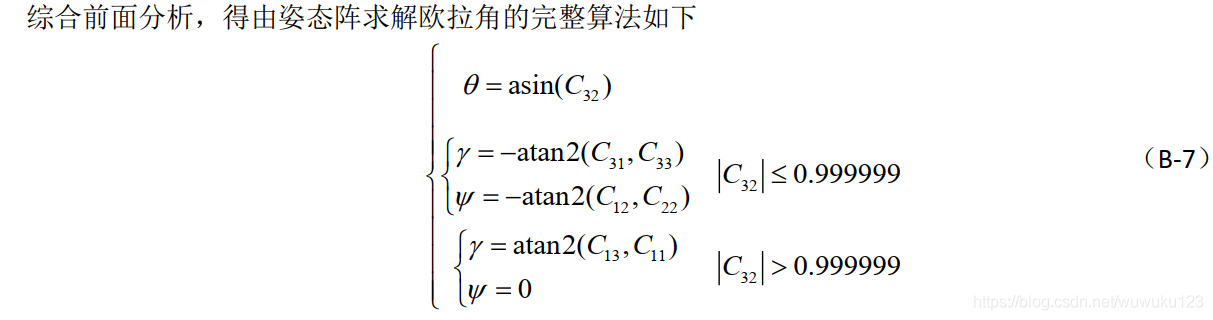
2、从方向余弦矩阵到欧拉角

3、从四元数到姿态阵

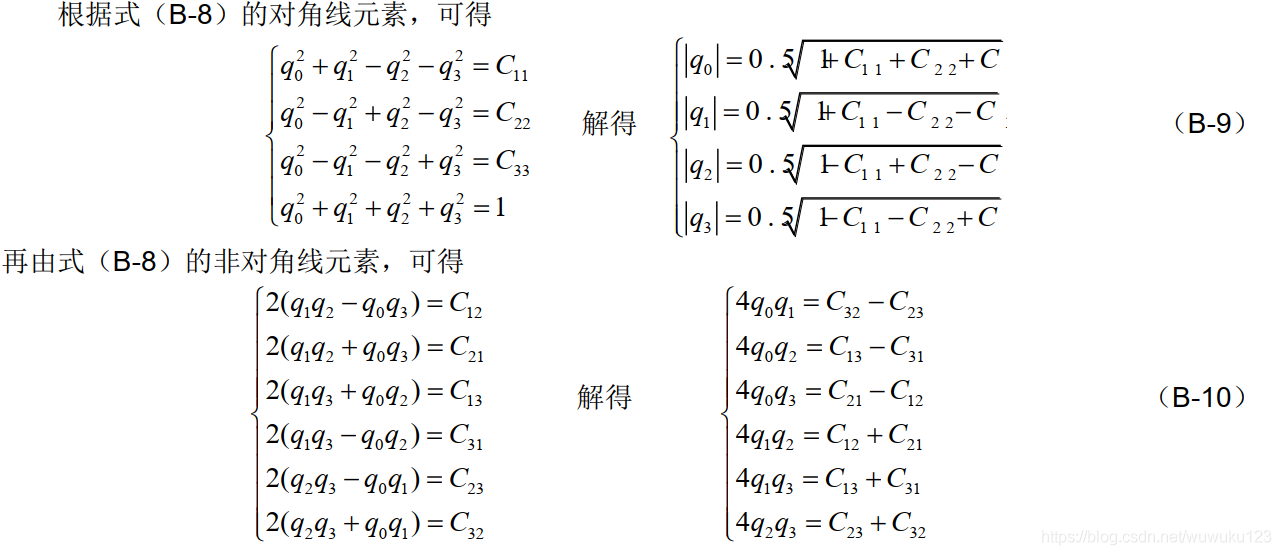
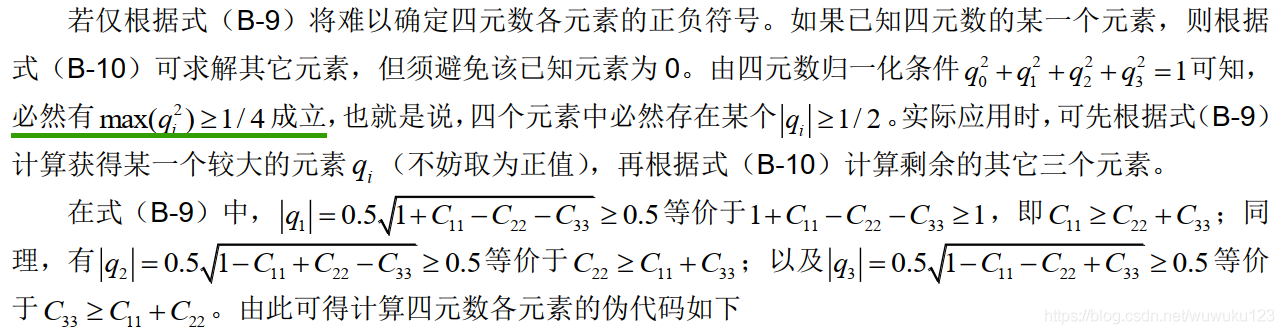
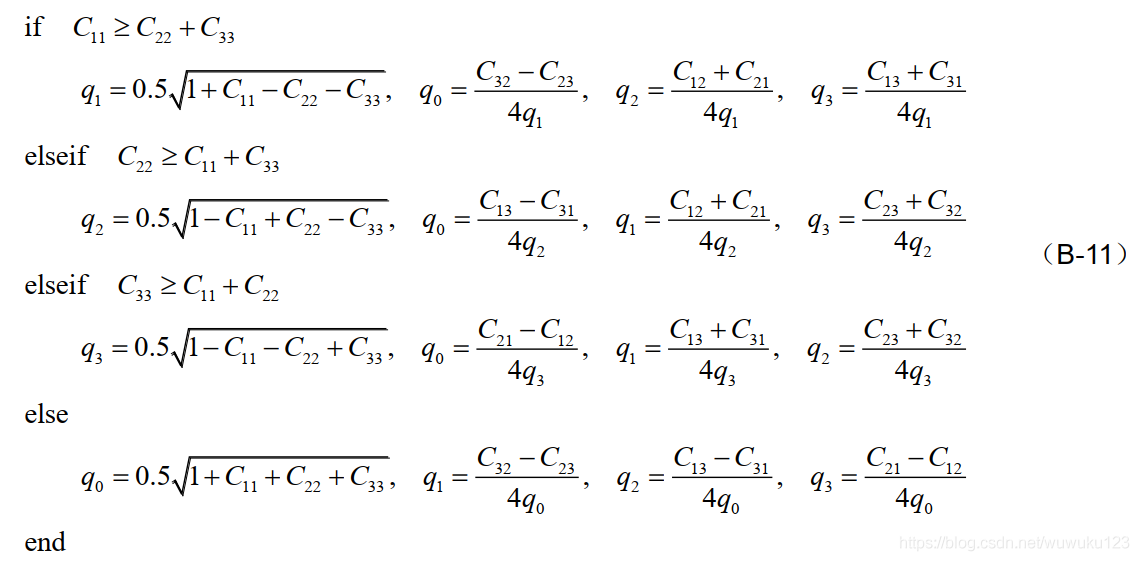
4、从姿态阵到四元数
5、从欧拉角到四元数
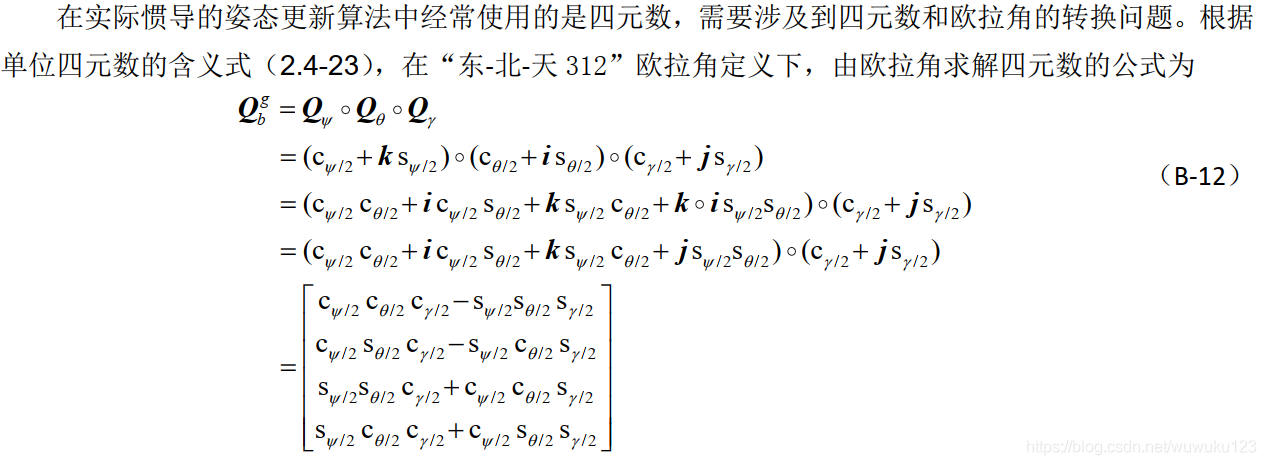
单位四元数:

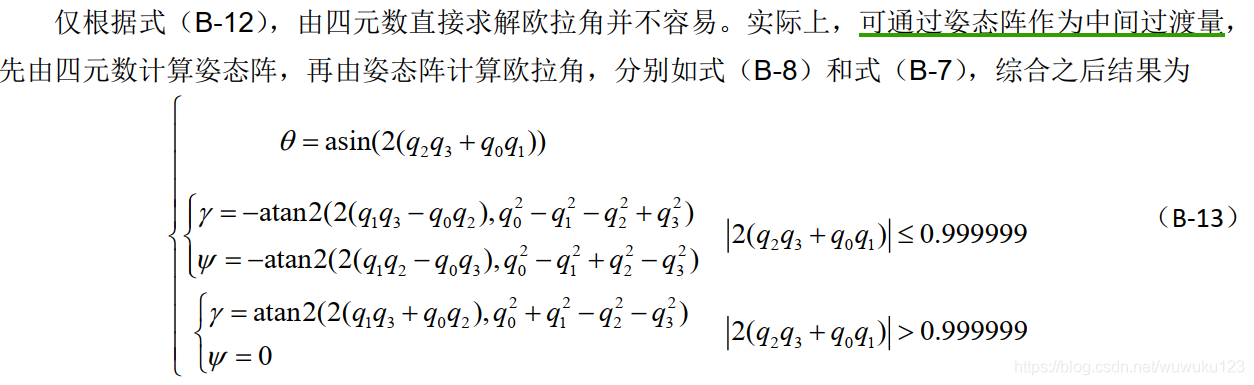
6、四元数到欧拉角

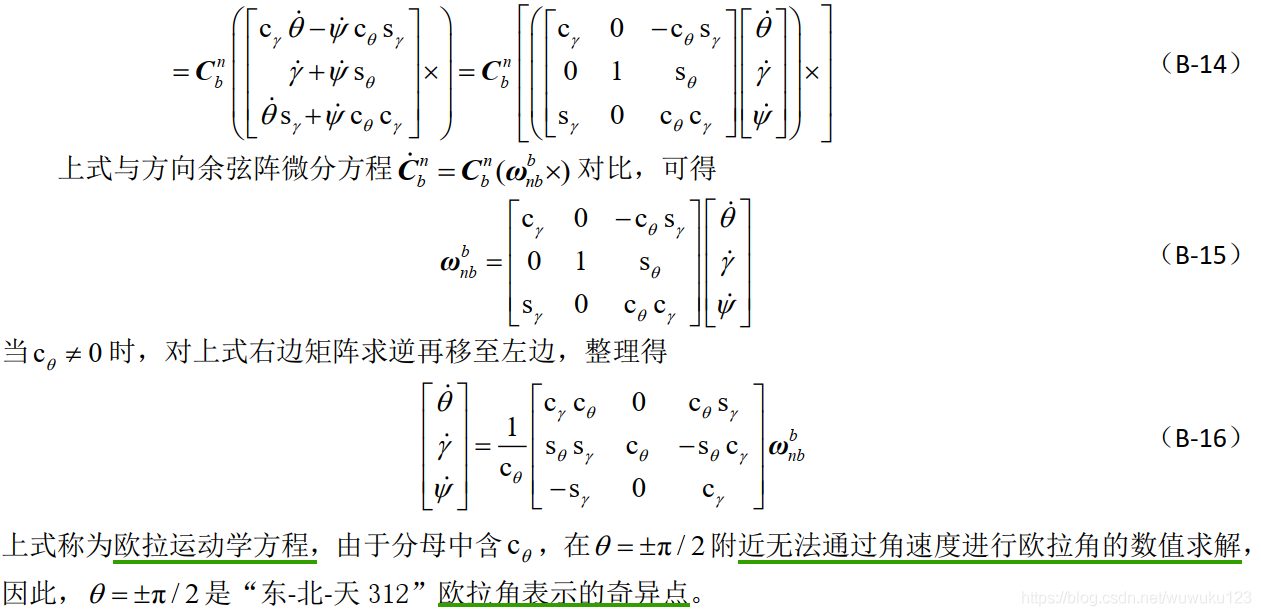
7、欧拉角微分方程;

导航坐标系:东-北-天
载体坐标系:右-前-上
欧拉角定义:3-1-2旋转,(航向角-俯仰角-滚转角),其中航向角北偏西为正,范围【-pi pi】
从地理坐标系到载体坐标系的方向余弦矩阵为:
单位四元数:
 3632
3632











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言























