






本部分用RTKLIB version 2.4.2为例进行介绍:
3.1 文件目录介绍
3.1.1 首先去官网下载RTKLIB压缩包:RTKLIB 开源代码之科普&快速入门&网络资料&产品/数据下载;解析、可以看到如下的文件目录结构:
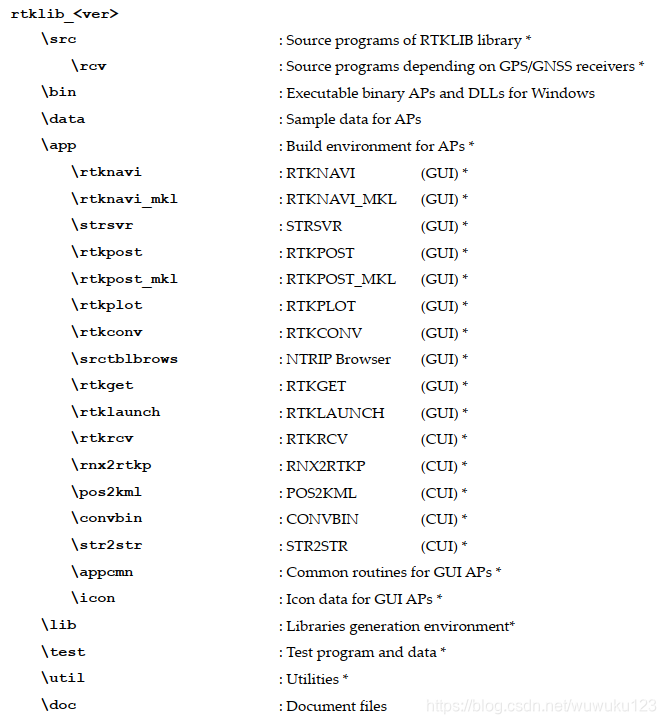
要执行GUI AP,在<安装目录> \ rtklib_ <ver> \ bin中查找对应的执行文件;
要执行CUI AP,请在命令路径中添加<install dir> \ rtklib_ <ver> \ bin。
3.1.3 RTKLIB中的GUI和CUI AP从不使用Windows注册表。 要卸载软件包,只需删除安装目录中的整个文件和目录。
3.1.4 GUI AP的可选设置保存在INI文件(* .ini)中,该文件通常位于目录<install dir> \ rtklib_ <ver> \ bin中。 请注意,INI文件的目录在版本中已更改。 2.4.2。 要成功完成旧版本RTKLIB AP的可选设置,请将c:\ Windows中的INI文件(* .ini)复制到<安装目录> \ rtklib_ <ver> \ bin目录中。以RTKPOST为例,rtkpost.ini只是将界面的内容保存下来,并且不能够修改界面的内容。
3.1.5 某些GUI AP(RTKCONV,RTKPOST,RTKNAVI,RTKGET和STRSVR)可以通过命令行选项-i <inifile> .ini执行,以为其他可选设置选择替代的INI文件。
您可以使用命令行选项以及选项-t <title>来更改窗口标题,从而切换此类AP的选项。 因此,您可以为同一GUI AP配置多个快捷方式通过设置这些快捷方式的属性使用不同的选项。
3.1.6 要使用RTKPOST_MKL或RTKNAVI_MKL(内部嵌有MLK库链接的版本RTKPOST或RTKNAVI)在多核CPU或多处理器PC上更快地进行矩阵计算,请根据CPU核数,将Windows环境变量OMP_NUM_THREADS设置为2、4或8。 这样可以进行多线程矩阵计算,从而缩短处理时间。
3.1.7 为了轻松执行GUI AP,在版本2.4.2中添加了AP启动应用程序RTKLAUNCH。要运行RTKLAUNCH,请执行<安装目录> \ rtklib_ <ver> \ bin \ rtklaunch.exe。 您可以单击AP RTKLAUNCH窗口中的图标或在任务托盘图标中选择弹出菜单以执行 RTKLIB AP。 RTKLAUNCH接受-mkl选项来启动RTKPOST_MKL和RTKNAVI_MKL,而不是RTKPOST和RTKNAVI,并带有-tray选项以启动启动器作为任务托盘图标。

3.2 RTKNAVI 实时定位
应用程序RTNAVI,必须输入原始观测数据、导航信息才能够进行实时处理。设置定位模式为Kinematic ,并将基准站和移动站数据输入到RTKNAVI,将会进行整周模糊度解算,并输出高质量的定位结果。
3.2.1 执行rtknavi或rtknavi_mkl
3.2.2 RTKNAVI输入数据流,Input Streams, Output Streams (optional) and Log Streams (optional) 输入/输出/记录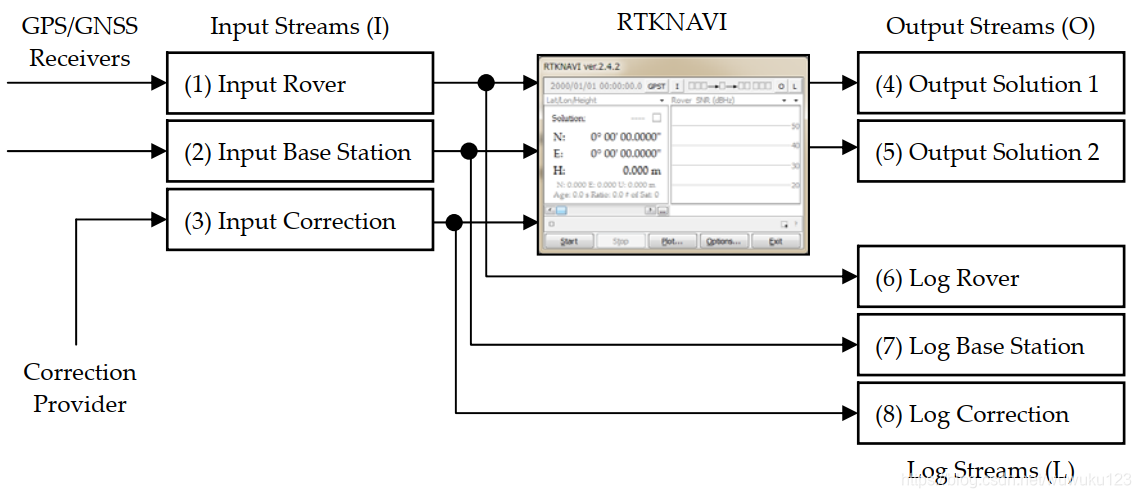
3.2.3 要想进行实时定位,必须输入原始观测信息和星历信息;
点击RTKNAVI窗口中的上部,"I";如下所示:
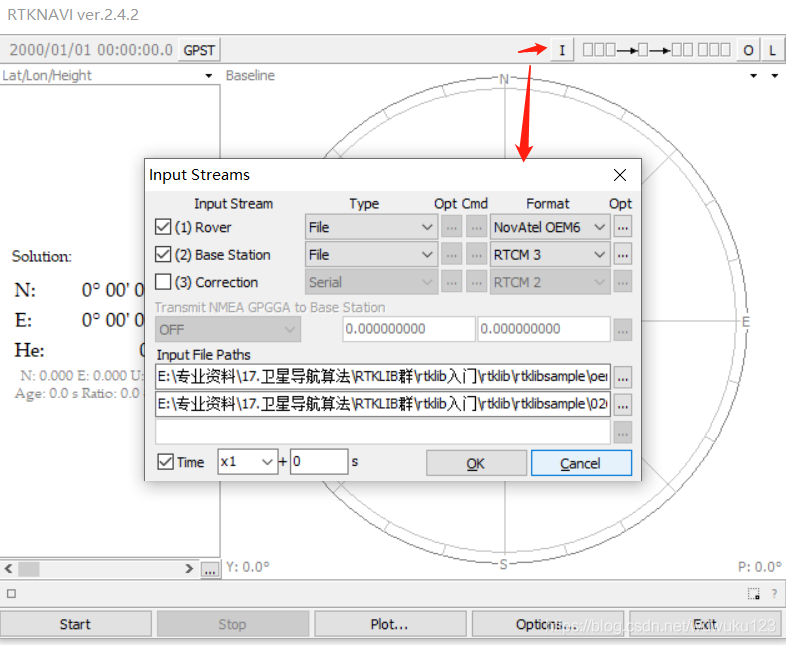
3.2.4 为每一个”流“进行配置;如果只是单点定位,只需要配置“Rover”即可。
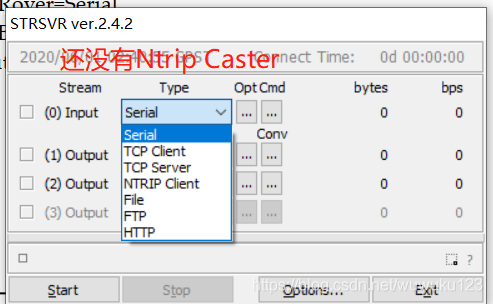
数据流的类型/来源:
Serial : 通过RS232C或USB接入rtknavi;
TCP Client : 通过TCP协议,连接TCP Server;TCP Server将数据送给RTKLIB;
TCP Server: 通过TCP协议,RTKLIB拿TCP Client的数据;
Ntrip Client : 通过NTRIP协议,连接Ntrip Caster;
File :通过记录文件输入RTKLIB;
FTP : 仅支持Correction, 通过FTP下载输入,导入RTKLIB;
FTTP : 仅支持Correction, 通过FTTP下载输入,导入RTKLIB;
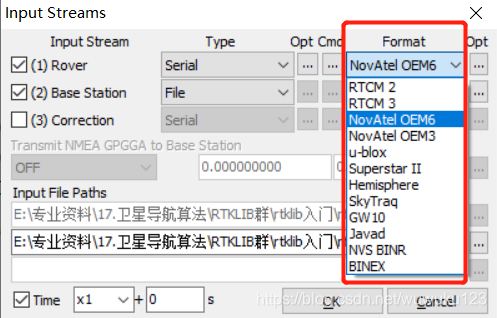
流数据格式:
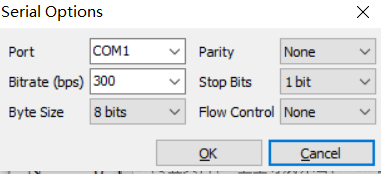
3.2.5 串口模式
设置以下参数:
串口号、波特率、字节大小、停止位、奇偶校验、停止位、流控制
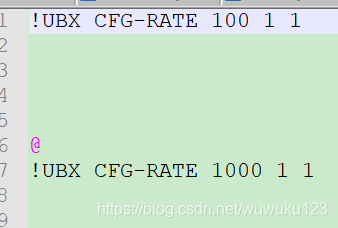
3.2.6 流类型中的CMD:ʺSerialʺ, ʺTCP Clientʺ or ʺTCP Serverʺ
可以通过RTKLIB配置接收机 startup 和shutdown 指令。
两种方式:
1、写入
2、导入
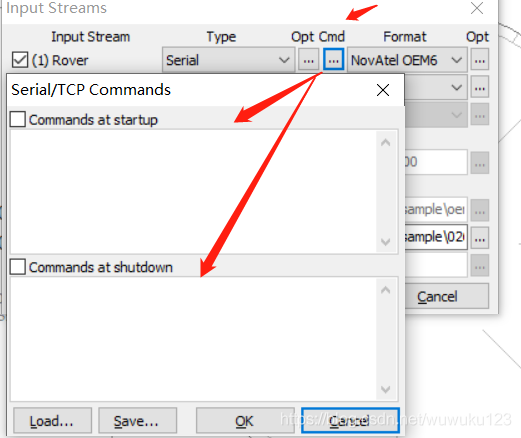
RTKLIB中自带了几种接收机的相关指令;此处以UBLOX接收机为例,如下:
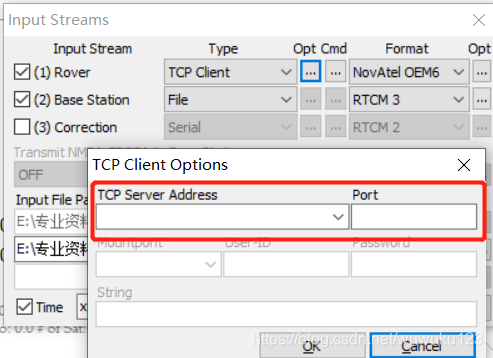
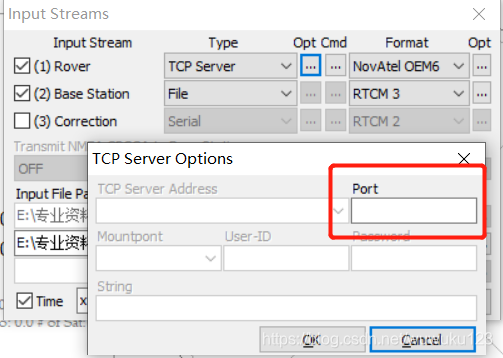
3.2.7 流类型中的Opt: ʺTCP Clientʺ or ʺTCP Serverʺ
1、TCP Client,需要输入TCP Server的地址和端口号(数据由Server发到Client)
2、TCP Server, 设置端口号,TCP Server去拿数据
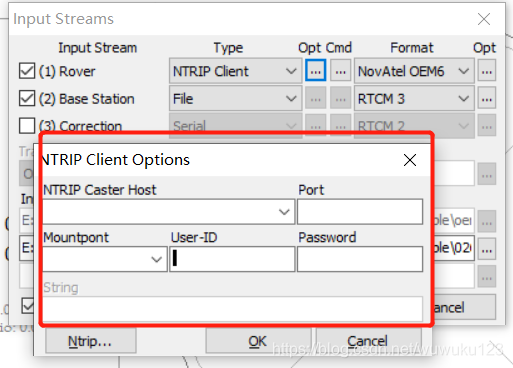
3.2.8 流类型中的Opt: ʺNTRIP Clientʺ
需要配置:
NTRIP Caster Host、Port、 Mount‐point、User‐ID、Password
If you keep the ʺPortʺ field blank, the default port number (2101) of NTRIP is used.Note that ʺUser‐IDʺ cannot contain ʺ:ʺ.
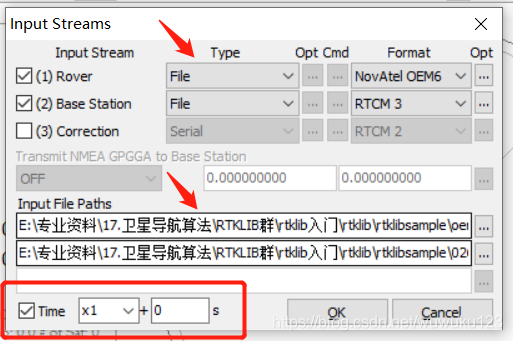
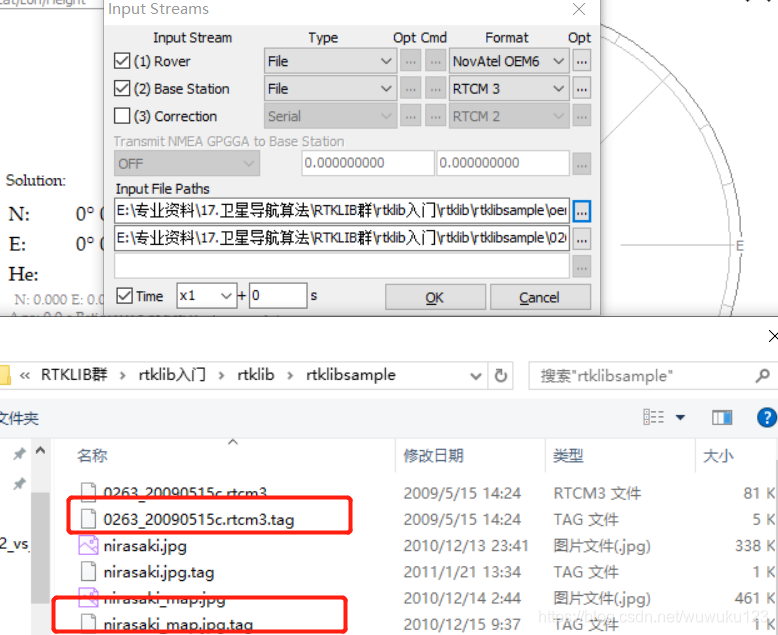
3.2.9 Type: ʺFileʺ
输入为原始数据;如果想要更改回放速度或时间偏移,那么必须有.tag的关于时间的文件。
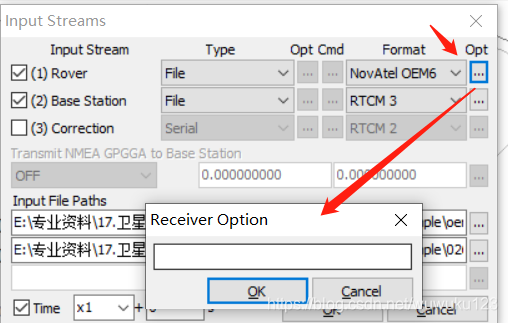
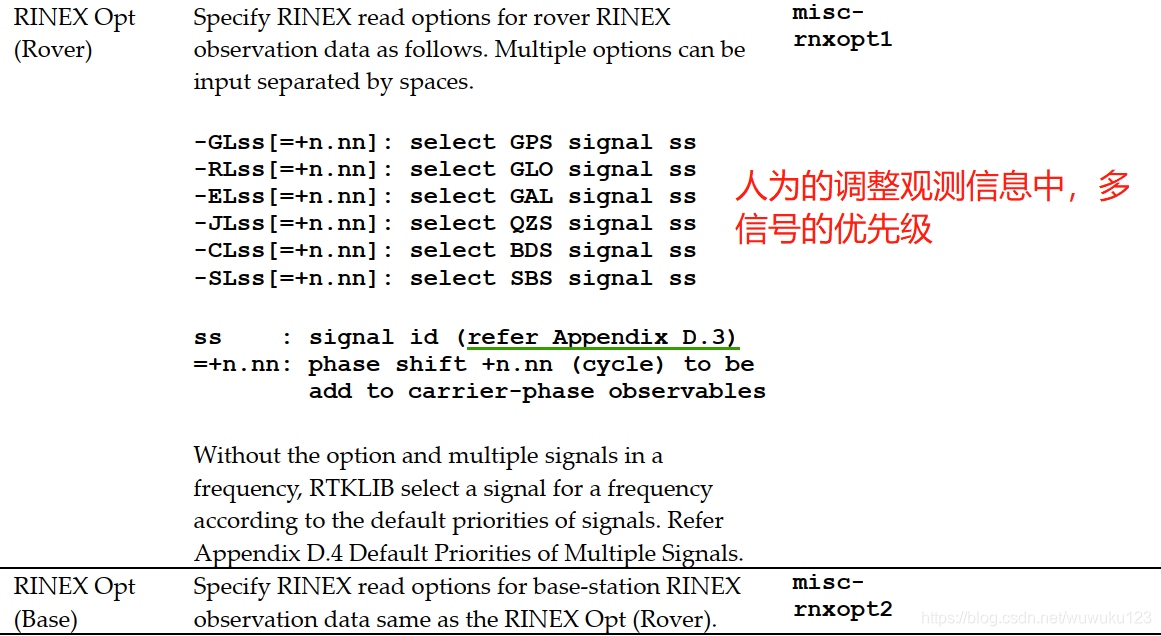
3.2.10 Format后面的Opt:
如果某一个频点有多个信号,可以在此处设置优先级;通过“空格”进行区分。
3.2.11 NRTK (network RTK) service:
如果基准站为以下服务类型:“serial”,"Tcp Client","Tcp Server","Ntrip Client";需要选择“Transmit NMEA GPGGA to Base Station”;

有两种发送移动站坐标到基准站的方式:
1、如果知道当前移动站的坐标,选择“Latitude/Longitude”;
2、选择“Single Solution”,将移动站坐标传送到基准站;
注意:负号表示南纬、西经。
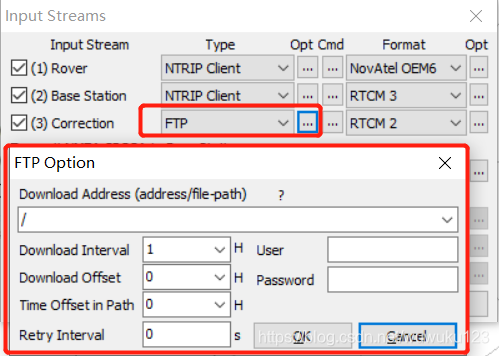
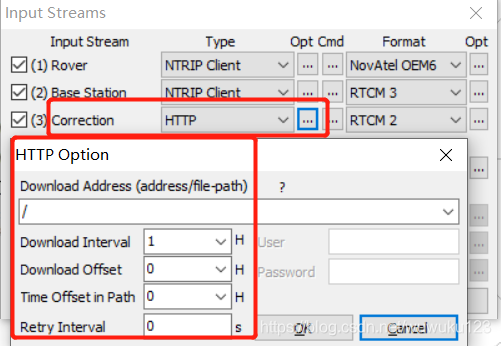
3.2.12 改正项Correction ,数据流为“FTP”,"HTTP"
1、FTP:<server address>/<file path>
示例: cddis.gsfc.nasa.gov/gps/products/%W/igu%W%D_%hb.sp3.Z
Download Interval : 下载间隔
Download Offset : 下载时间
Retry Interval :每隔多长时间重新下载
2、HTTP:
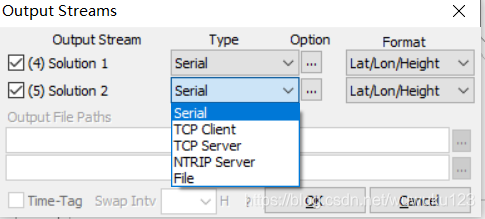
3.2.13 输出流/Output Streams
最多支持两路输出,配置和输入流大体一致!
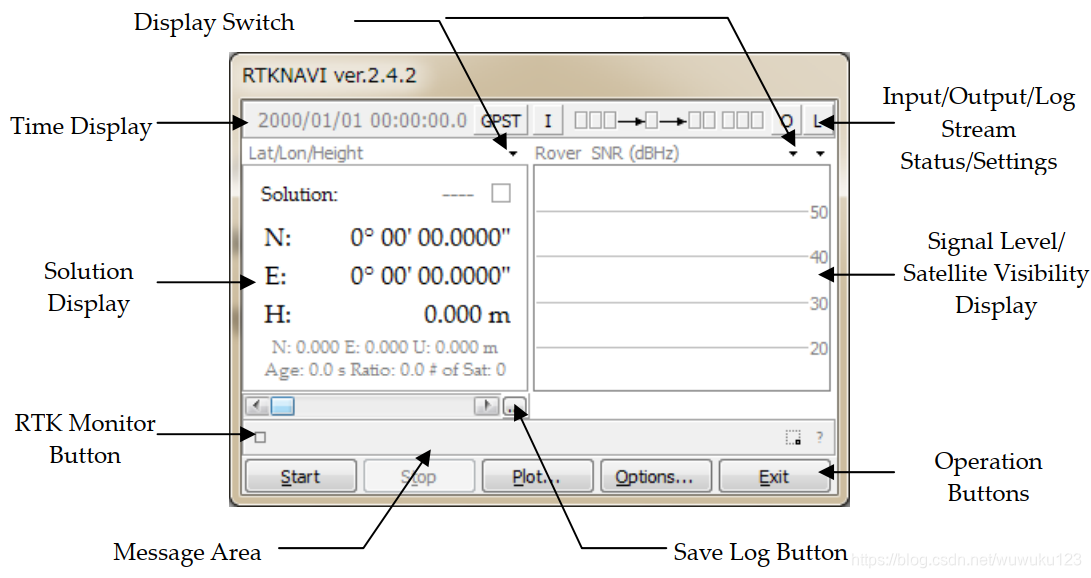
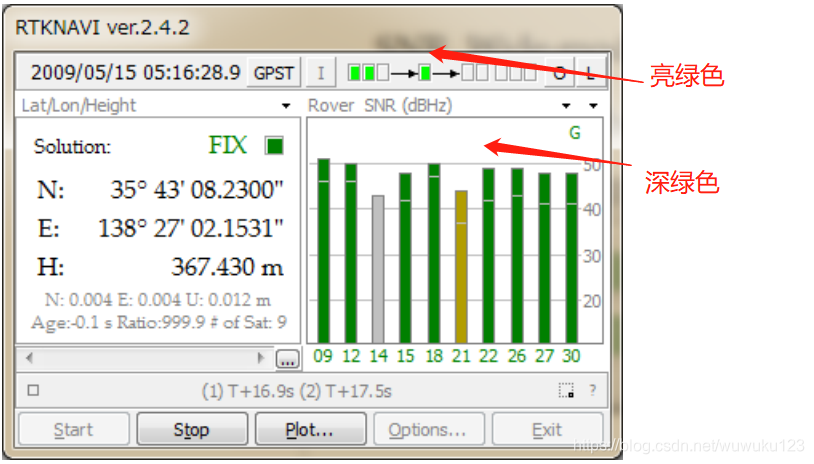
3.2.14 RTKNAVI 主界面
Gray/灰色:代表不能用;
Orange/橙色 :代表等待连接;
Deep-Green/深绿色:代表连接、正在运行;
Light-Green/亮绿色: 代表数据激活;
Red/红色:代表通信错误;
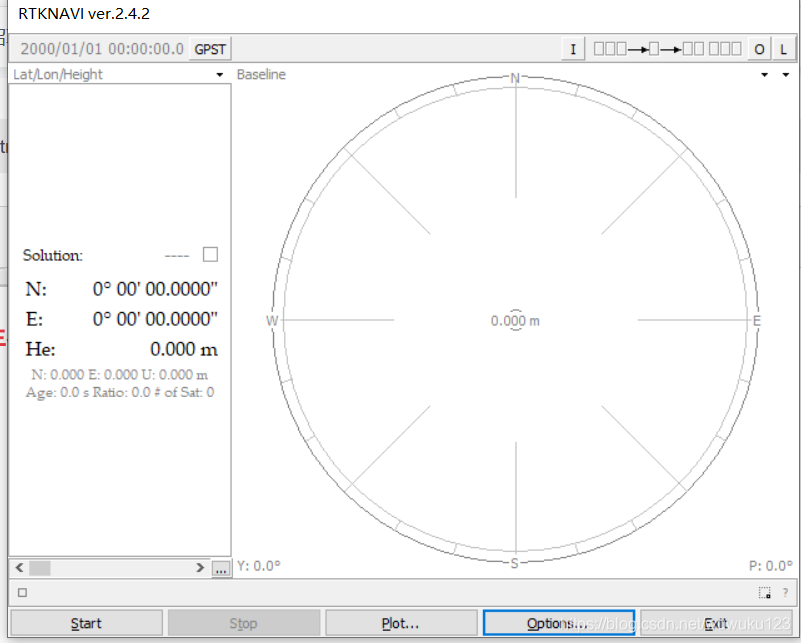
3.2.15 定位方式
FIX, FLOAT, DGPS, SBAS, SINGLE or PPP
在纬度/经度/高度模式下,标签ʺHʺ和ʺHeʺ分别表示大地和椭圆高度。
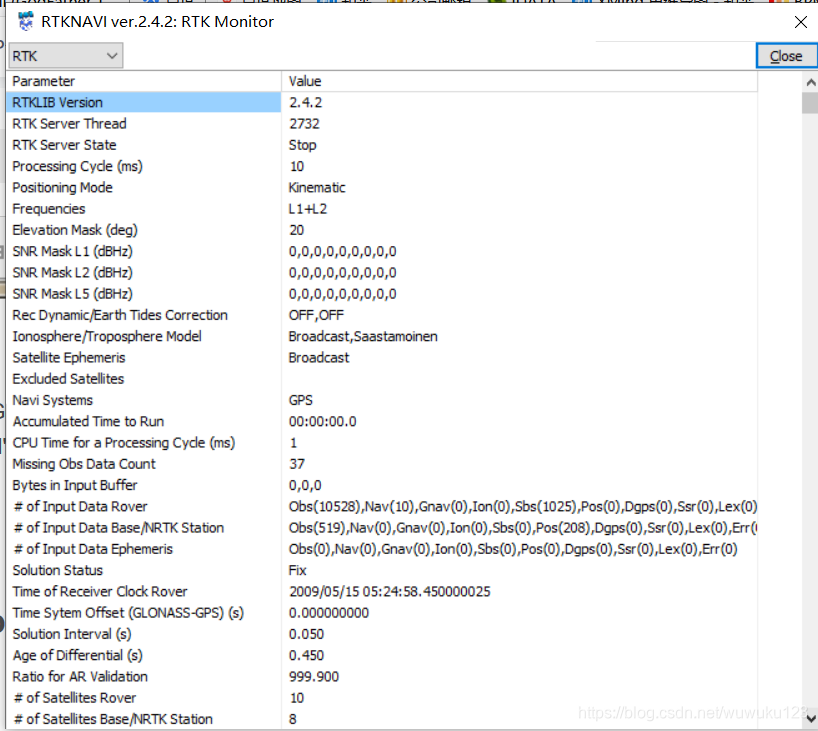
3.2.16 RTK Monitor
实时检测窗口,给出的信息比较多,对于了解整个RTK系统的运行有很直观的认知。

3.3 Configure Input, Output and Log Streams for RTKNAVI 配置RTKNAVI的输入、输出和日志流
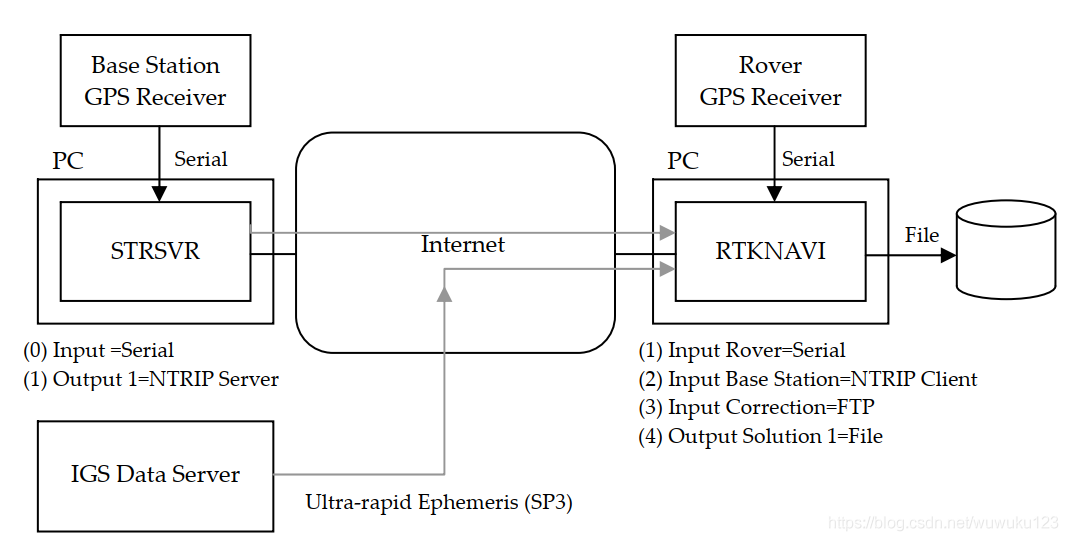
在RTK-GPS/GNSS相对定位中,移动站和基准站通常位于不同的地方,这就需要一个通讯链,STRSVR可以作为一个通讯中转,支持分发、多路信号。
例如,在移动站接收基准站的观测信息/Observation Data以得到差分解/固定解;用户需要在基准站将带有STRSVR的电脑连接到基准站接收机,然后通过STRSVR将数据发送到移动站,如下是通过RTKNAVI和STRSVR的配合使用的几个应用场景:
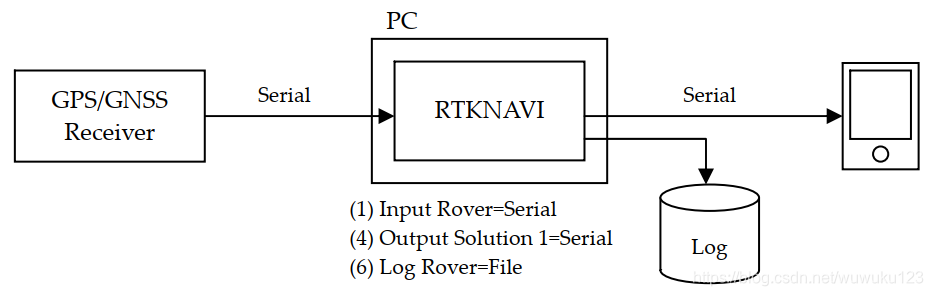
1、移动站单点定位、输出结果保存到文件/file

2、单点定位输出结果到串口/serial,日志流保存到文件
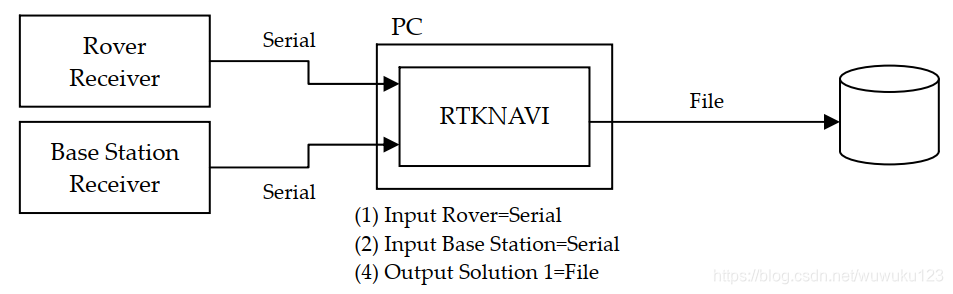
3、RTK-GPS/GNSS中,移动站和基准站数据来自串口/serial,结果保存到文件
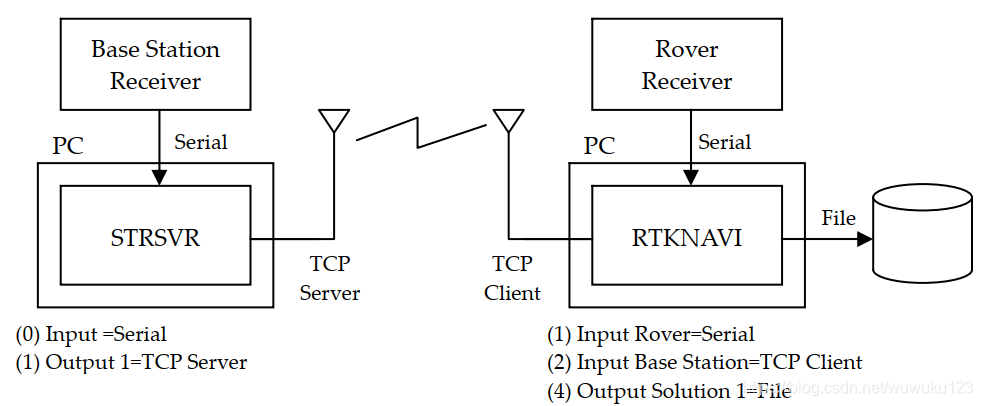
4、RTK-GPS/GNSS中,移动站数据通过串口/serial,基准站数据通过WIFI-NETWORK传过来;
基准站接收机数据通过串口连接到STRSVR,数据通过网络发送到移动站,移动站通过TCP Client接收基准站数据:
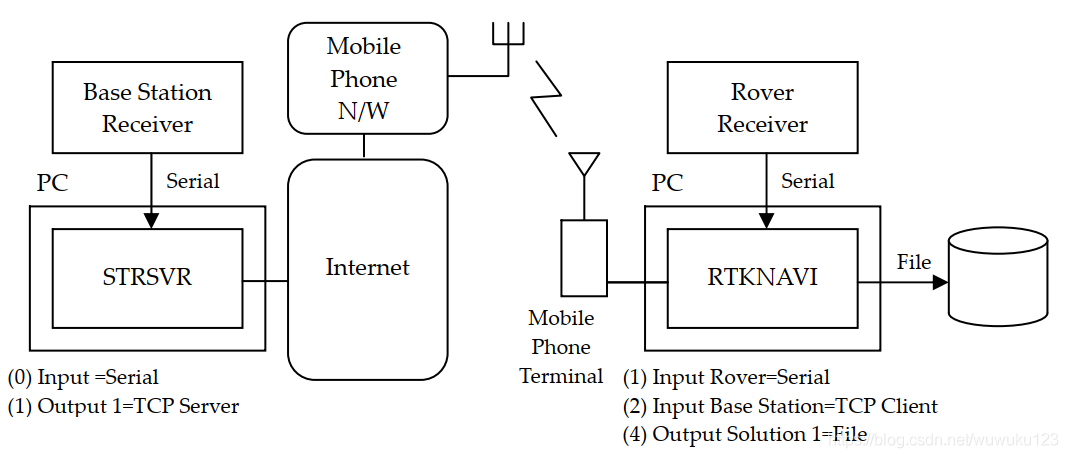
5、RTK-GPS/GNSS中,移动站数据通过串口/serial,基准站数据通过Mobile-Phone N/W 传过来;
基准站接收机数据通过串口连接到STRSVR,数据通过网络发送到移动站,移动站通过TCP Client接收基准站数据:
6、RTK-GPS/GNSS中,移动站数据通过串口/serial,基准站数据通过NTRIP Client 传过来;
基准站接收机数据通过串口连接到STRSVR,数据通过Ntrip Caster发送到网络,移动站通过TCP Client接收基准站数据:
目前还不支持此种操作!

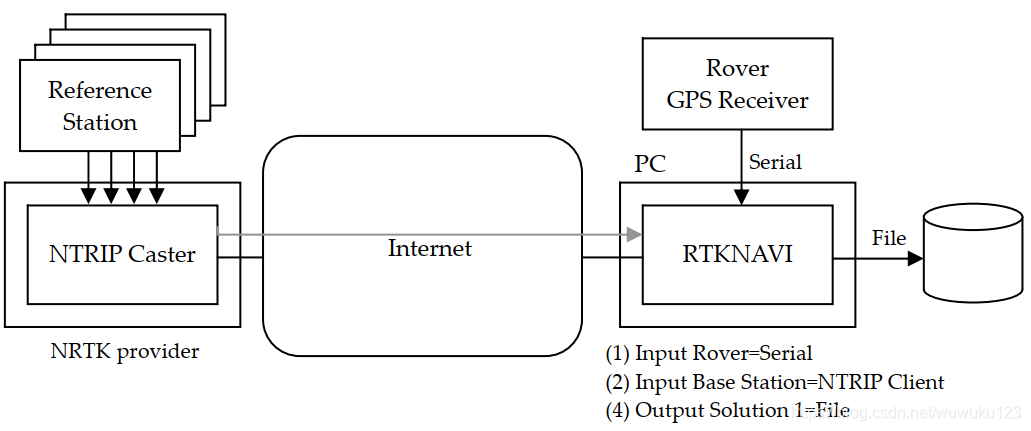
7、RTK-GPS/GNSS中,网络RTK/Network RTK 服务
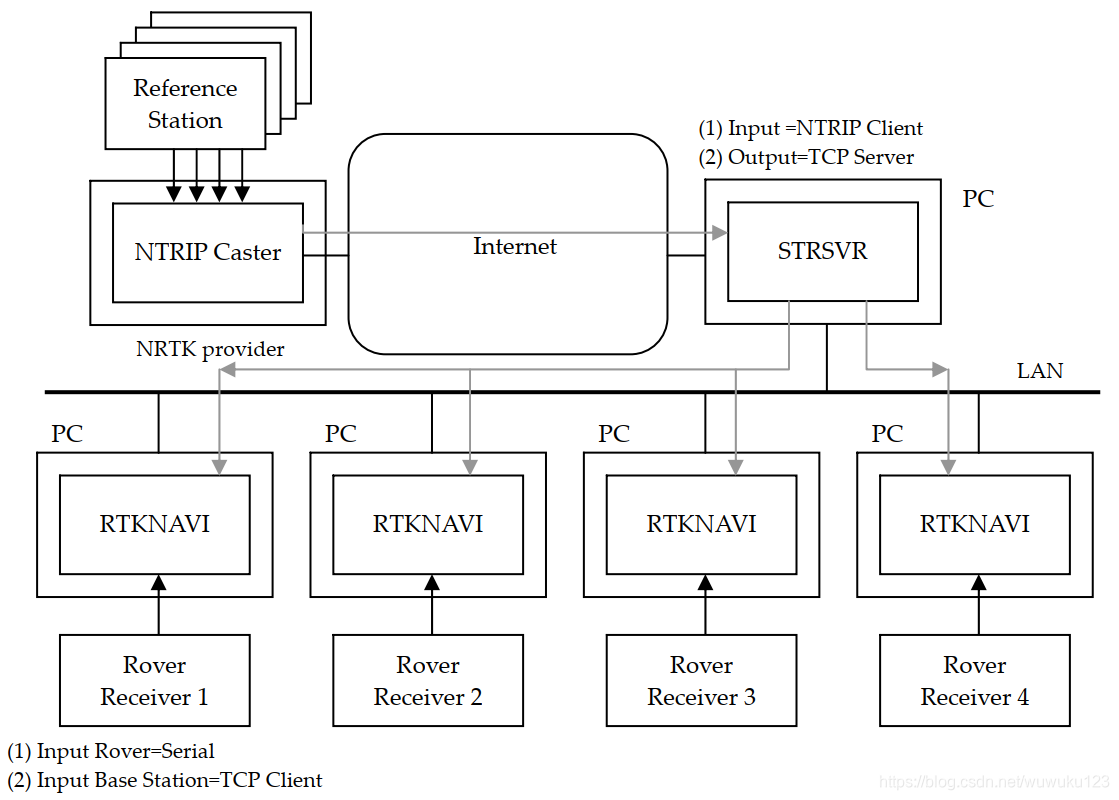
8、Multiple RTK‐GPS/GNSS with single NRTK service 多移动站的网络RTK服务
9、Real‐time PPP with real‐time satellite orbit and clock provided as a NTRIP stream 通过Ntrip流发送卫星轨道、钟差的实时PPP服务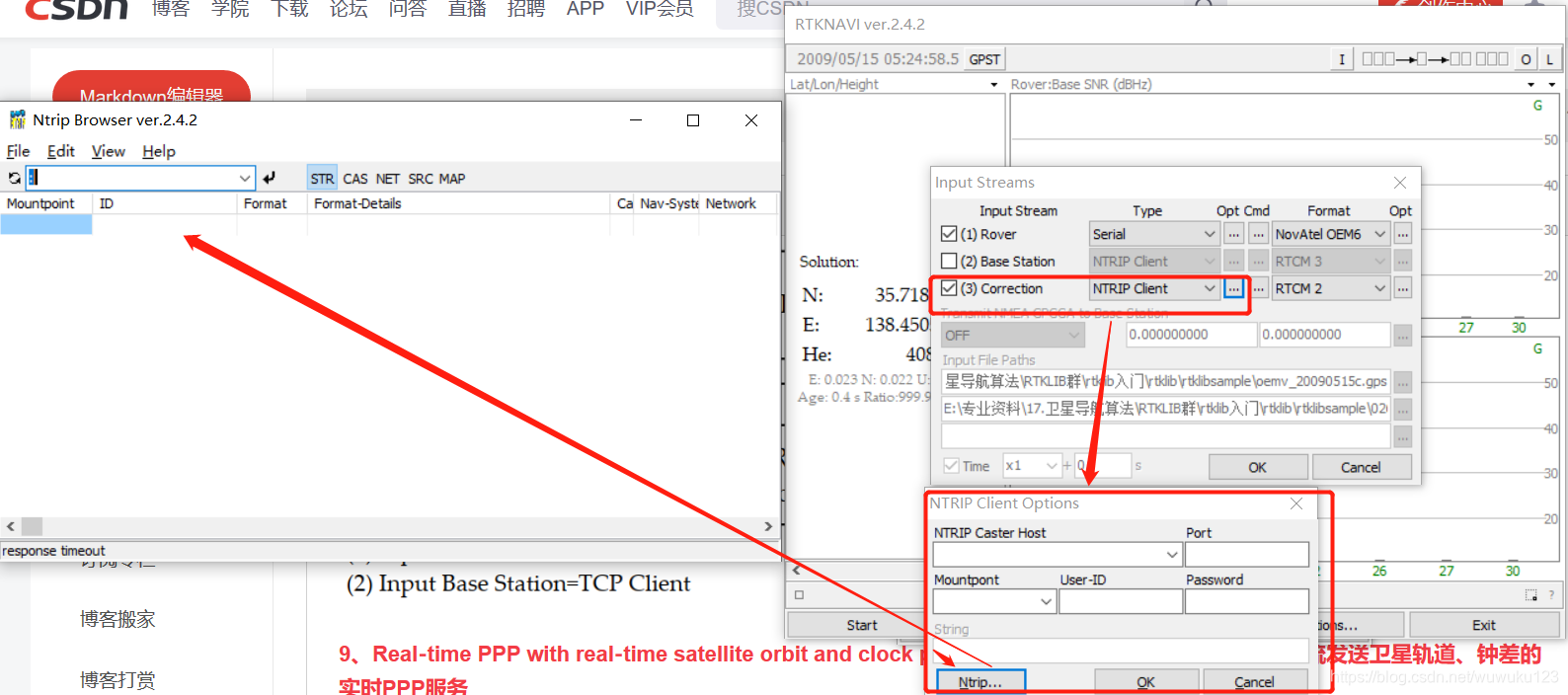
10、Long‐baseline RTK with FTP download of precise ephemeris 采用FTP下载精密星历的长基线RTK
11、STRSVR 2.4.2使用及配置
(1)输入、输出:
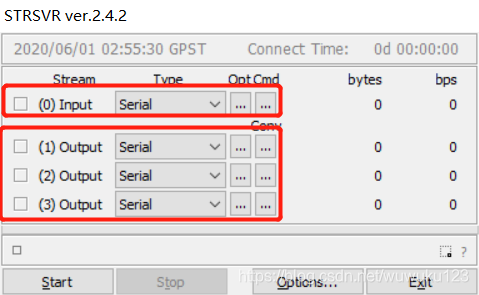
一个输入源;其具体配置和RTKNAVI中的输入流一致;
三个输出流,其具体配置和RTKNAVI中的输出流一致;
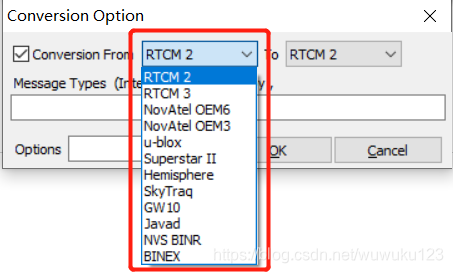
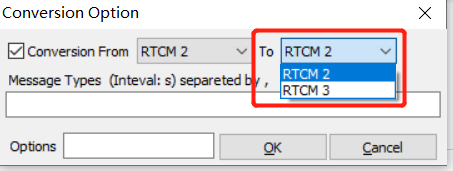
(2)Convert/格式转换:

目前支持的输入、输出转换格式为:
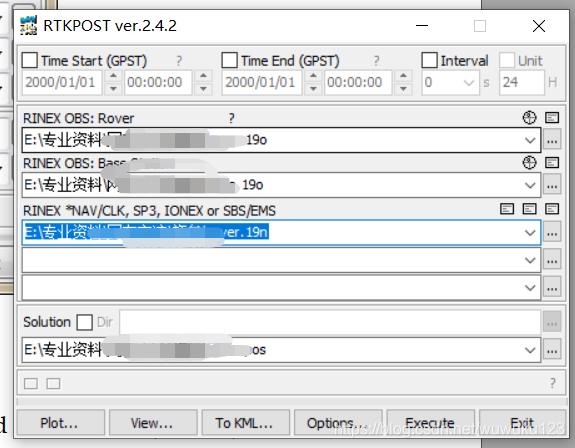
3.4 Post-Processing Analysis with RTKPOST
RTKLIB包含一个RTKPOST应用程序,能够处理RINEX 2.10、2.11、2.12、3.00、3.01、3.02观测数据和导航电文(GPS, GLONASS, Galileo, QZSS,BeiDou and SBAS),并且包含多种定位方式:Single‐point, DGPS/DGNSS, Kinematic, Static, PPP‐Kinematic and PPP‐Static。
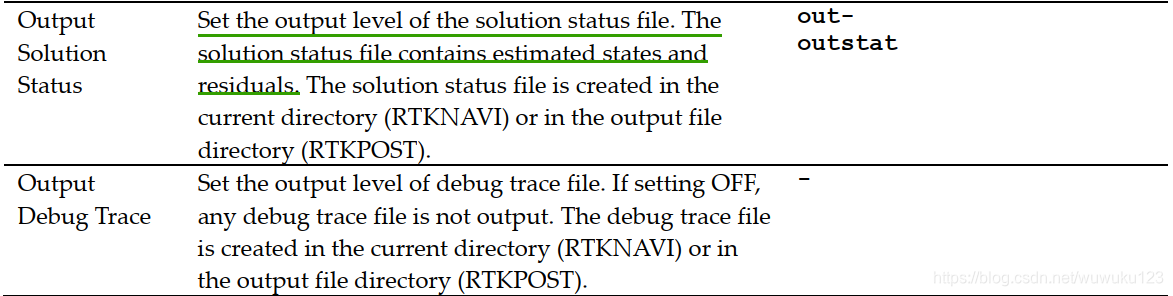
在Options中,Output Solution Status/ Debug Trace 中,State和Residuals的区别在于:
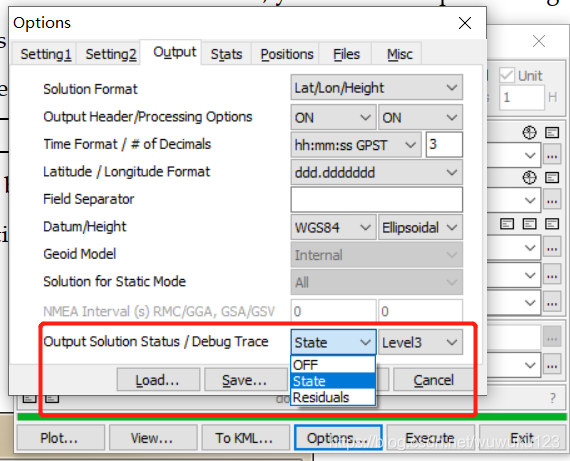
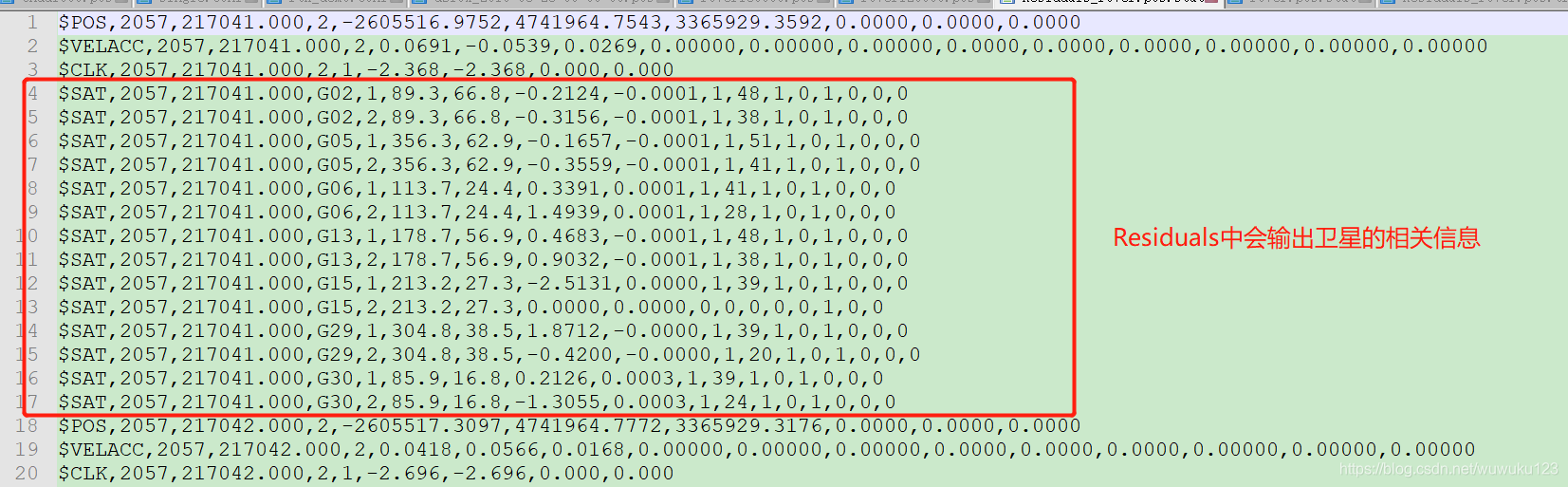
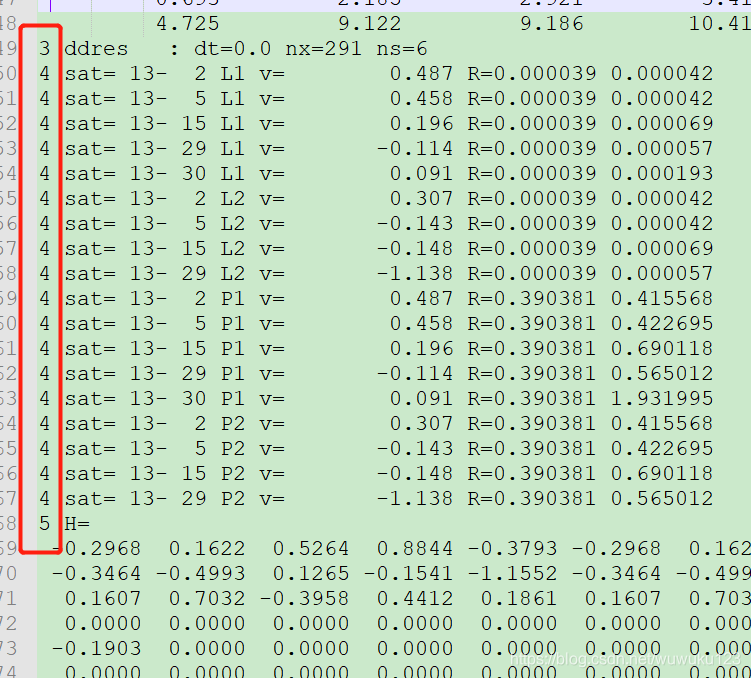
Residuals:
State:

详情参考:RTKLIB Manual 之 Appendix B File Formats
同时,如果 Level设置为5,则会在.trace文件中,输出小于等于5以下的调试信息。
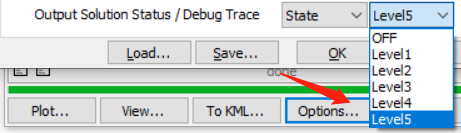
如下所示:
3.5 Configure Positioning Options for RTKNAVI and RTKPOST 配置RTKNAVI和RTKPOST的Options选项
Options页面的介绍和配置:
1、Setting1:

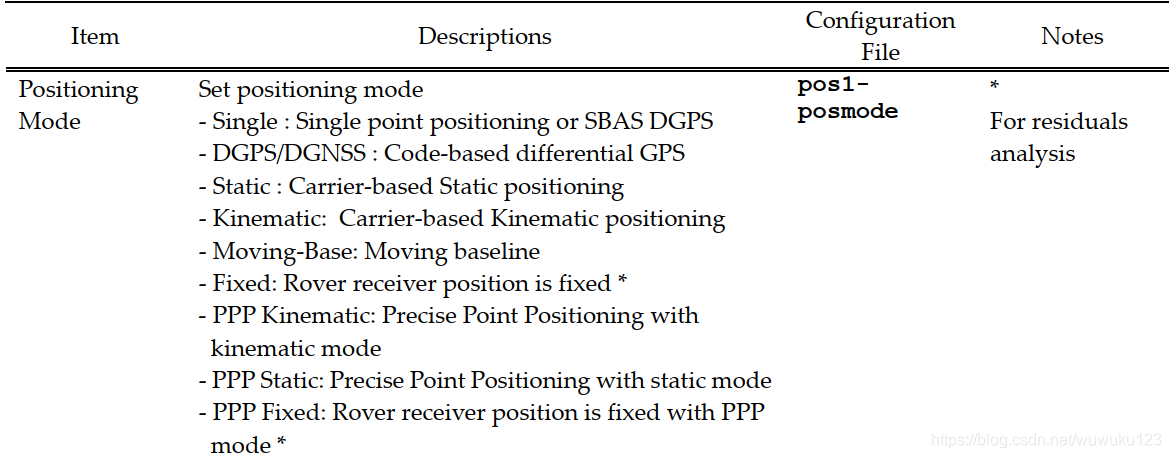
(1)Positioning Mode:定位模式
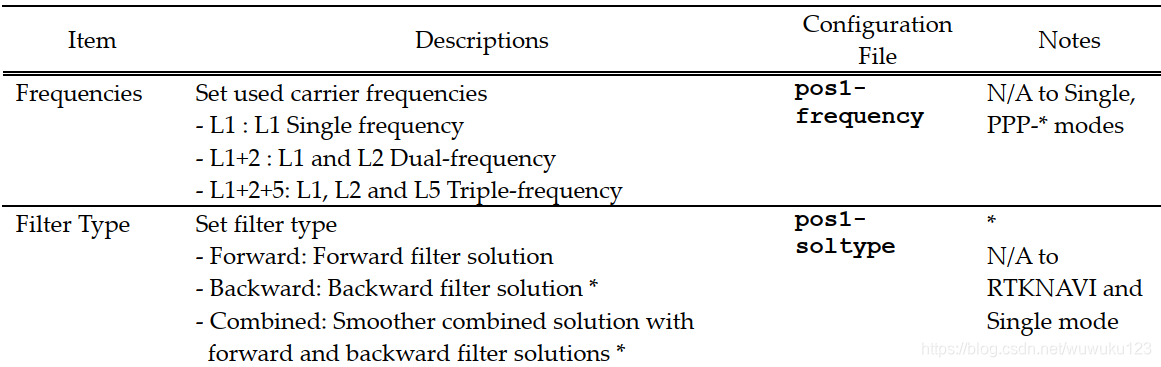
(2)Frenquencies/Filter Type
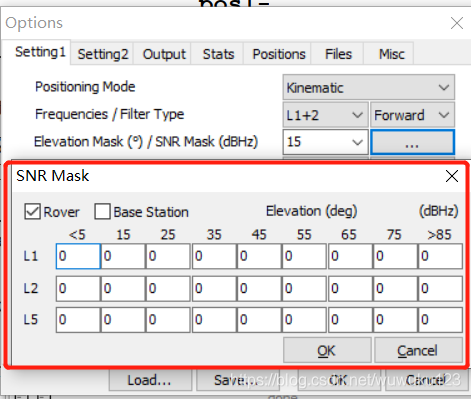
(3)Elevation Mask(°) /SNR Mask(dbHZ) 截至高度角、信噪比:不同信噪比对应不同的高度角

根据高度角5°-85°共9个挡位,设置对应的SNR
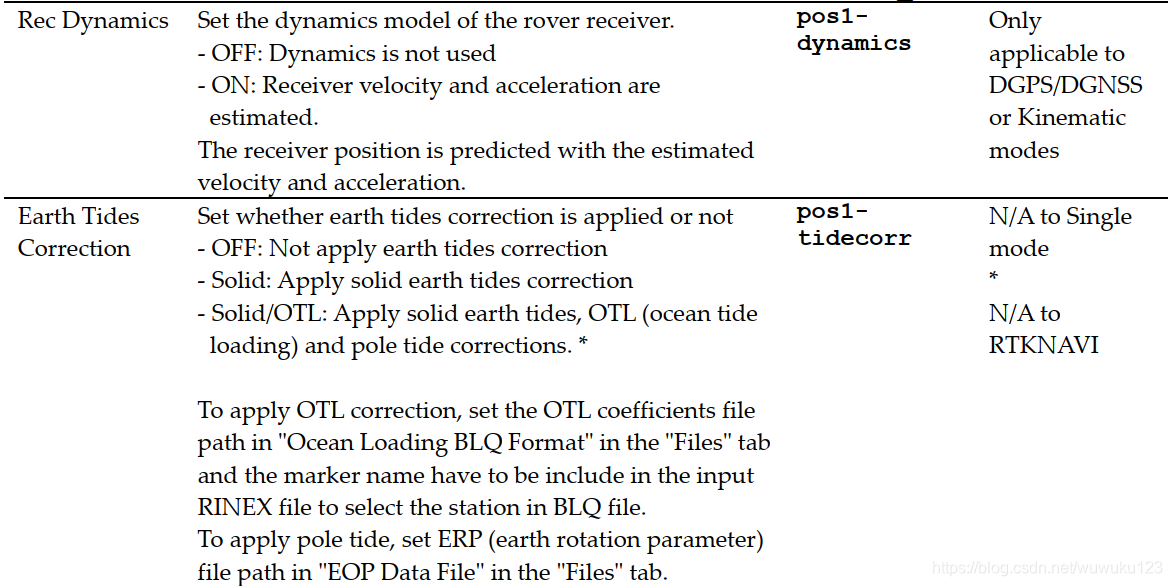
(4)Rec Dynamics / Earth Tides Correction
OTL/Ocean tide loading: 对应FILE中的 OTL BLQ File
pole tide correction:对应 EOP Data File
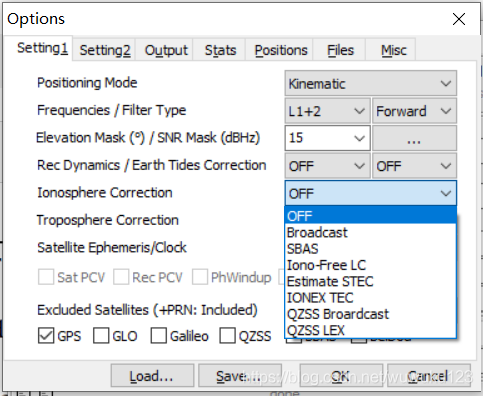
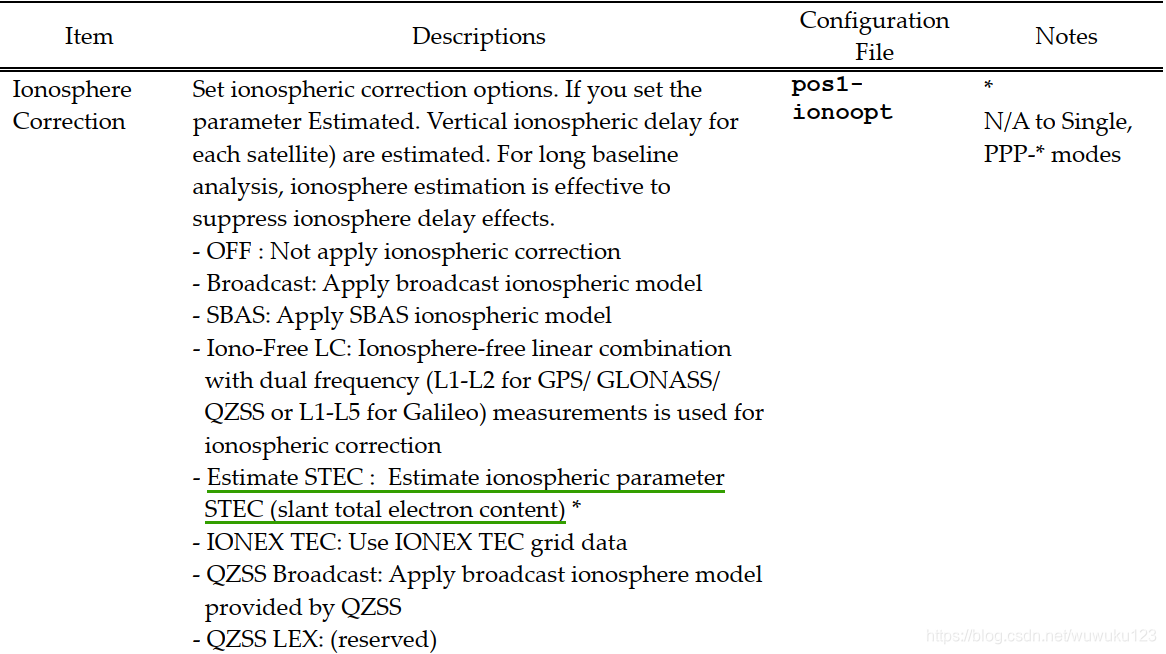
(5)Ionosphere Correction
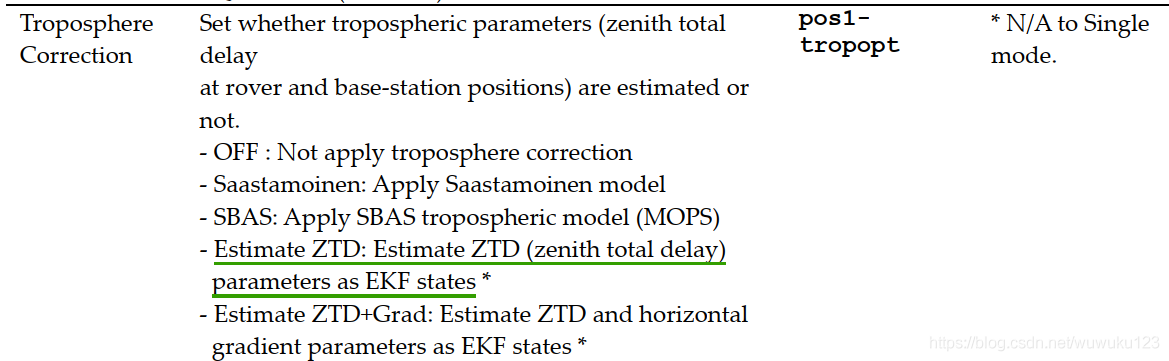
(6)Troposphere Correction
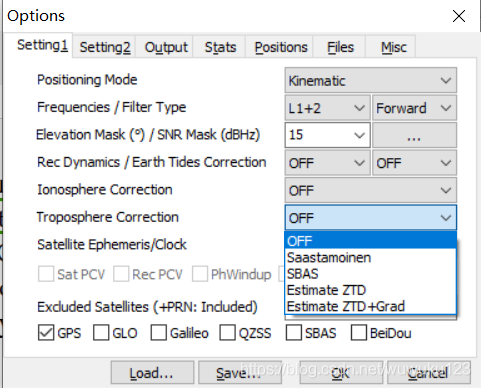
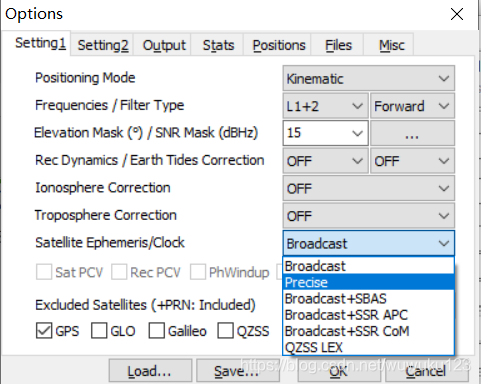
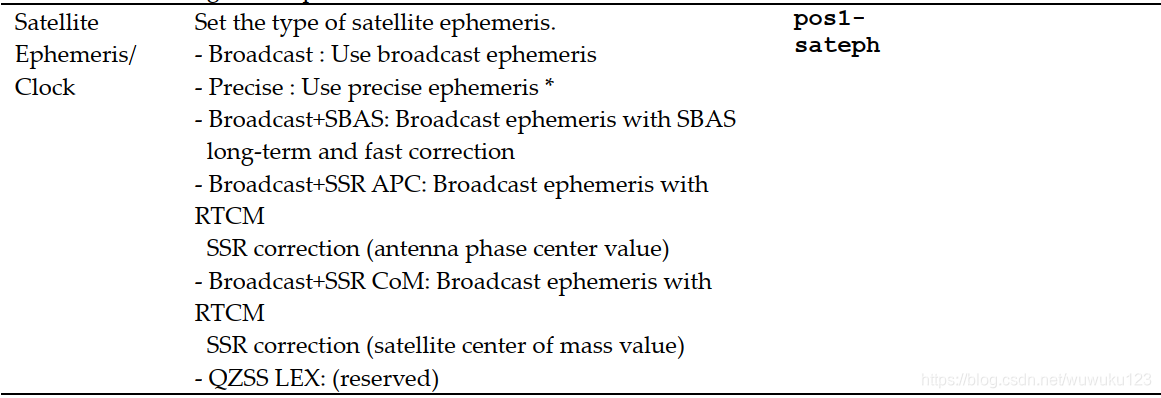
(7) Satellite Ephemeris /Clock
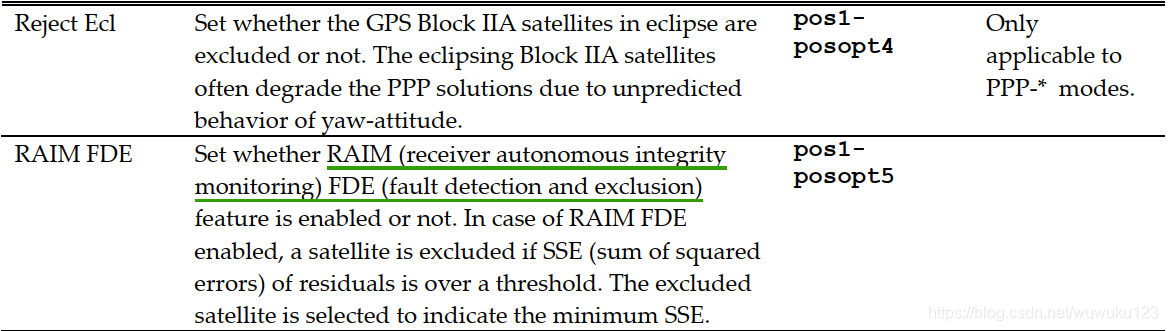
(8) Sat PCV、Rec PCV、phWindup、Reject Ed、Raim Fde
![]()
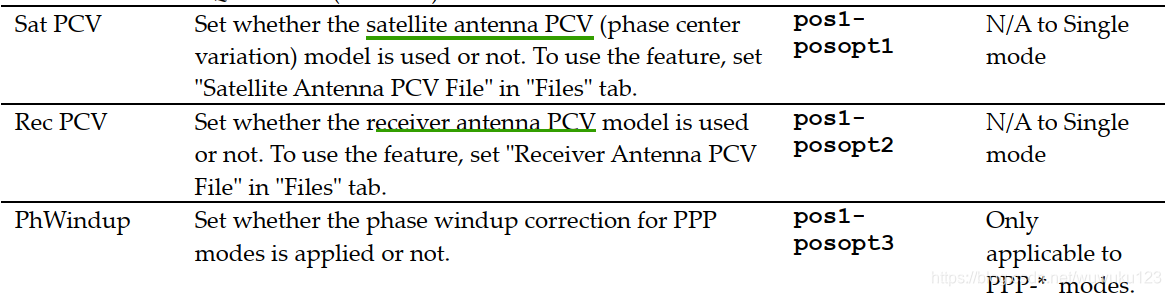
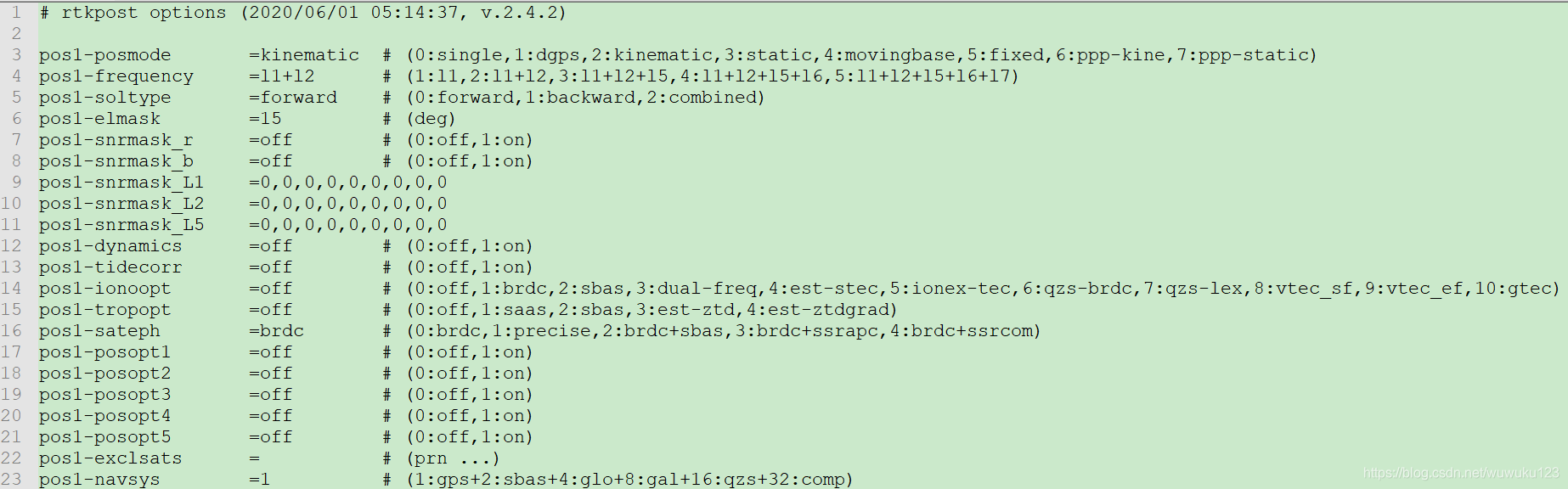
 配置文件中,对应如下:
配置文件中,对应如下:
pos1-posopt1 =off # (0:off,1:on) Sat PCV、
pos1-posopt2 =off # (0:off,1:on) Rec PCV、
pos1-posopt3 =off # (0:off,1:on) phWindup、
pos1-posopt4 =off # (0:off,1:on) Reject Ed、
pos1-posopt5 =on # (0:off,1:on) Raim Fde
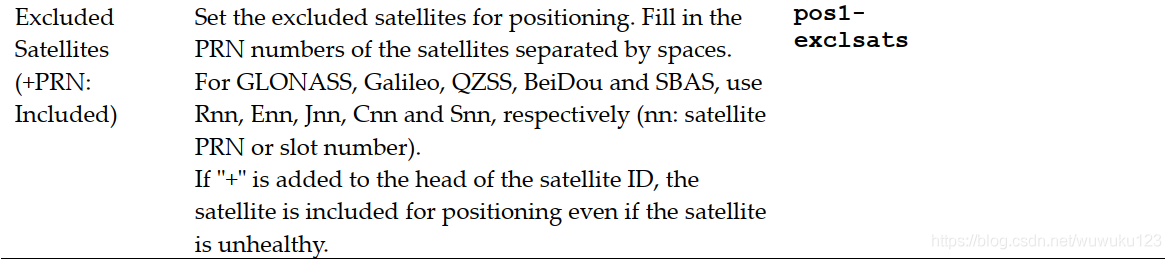
(9) Excluded Satllites(+PRN:Inluded)
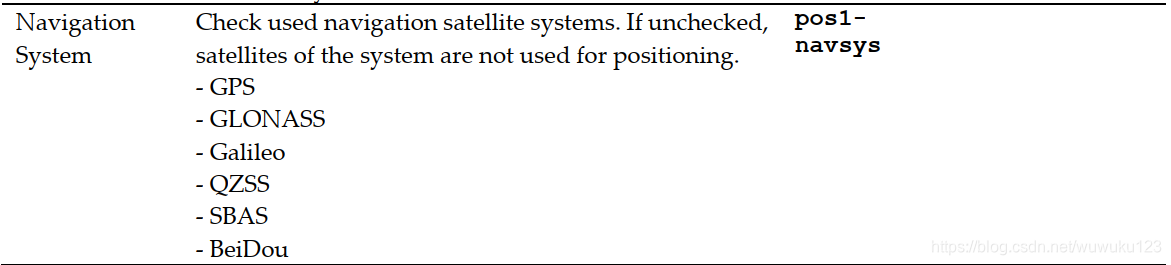
(10) Navigation Systems
![]()
Options中,设置的内容,可以通过Load选项导入配置,后缀名为:.conf ,第一页内容如下:
2、Setting2:
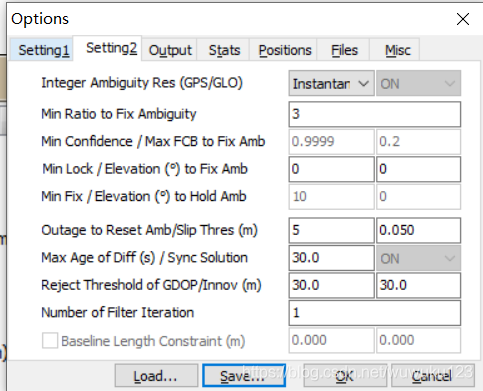
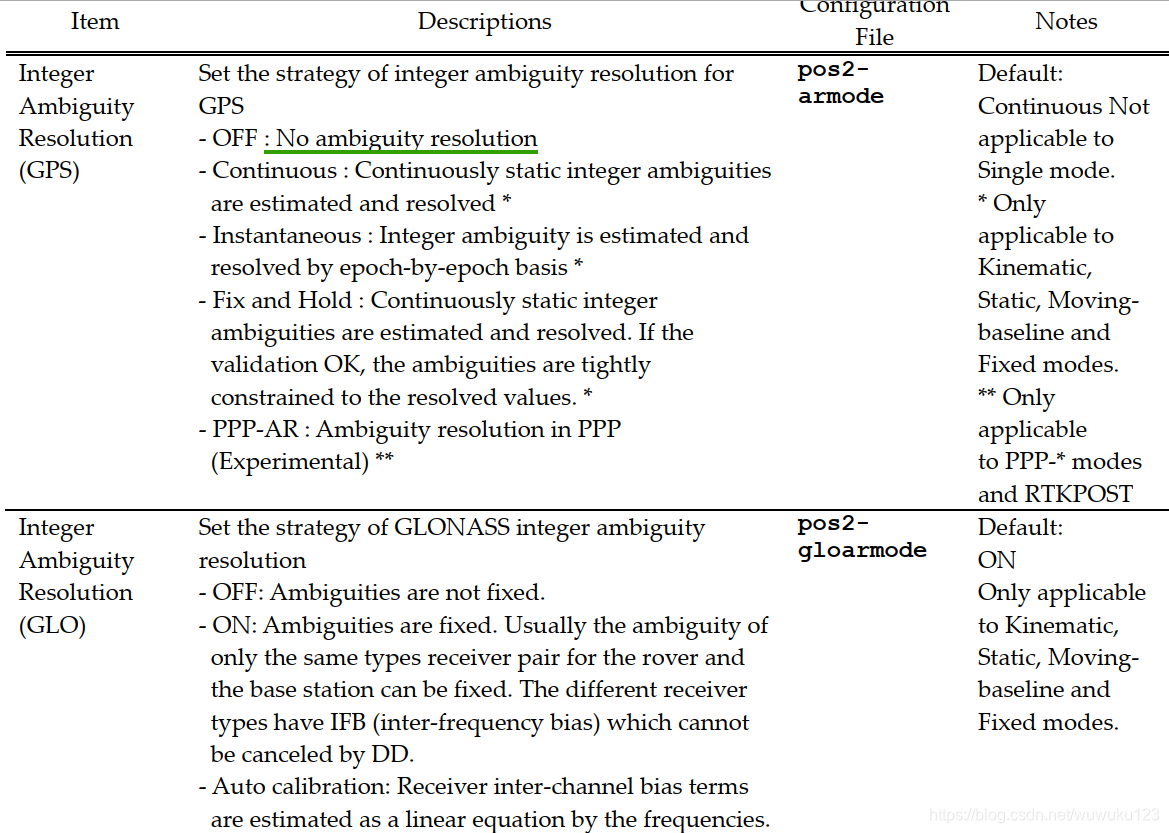
(1) Integer Ambiguity Resolution (GPS/GLO)
(2) Min Ratio to Fix Ambiguity
ratio-test 默认值为3

(3) Min Confidence /Max Fcb to Fix Ambiguity

(4) Min Lock /Elevation to Fix Ambiguity
默认值为:0,0

(5)Min Fix / Elevation to hold Ambiguity
默认值为:10,0

(6) Outage to Reset Ambiguity /Slip Thres(m)
默认值为:5,0.05m
Outage to Reset Ambiguity: 观测数据丢失超过5个,模糊度重置为初始值;
Slip Thres: 历元间采用载波相位几何无关方式,进行周跳探测的阈值为:0.05米;

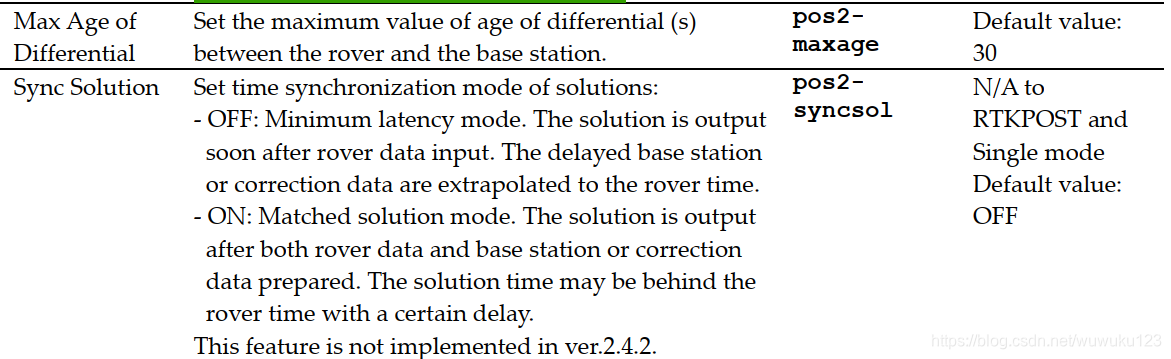
(7) Max Age of Diff(s) /Sync Solution
差分龄期:默认值是30秒;移动站和基准站之间的数据差,最大时间;
Sync Solution:
OFF模式为:最小延迟模式,即移动站数据到了之后,接着进行定位求解;基准站和改正项数据要外插到移动站数据;
ON模式为:当移动站、基准站、改正项数据准备好之后,才进行定位求解。
(8) Reject Threshold of GDOP /Innov(m)
GDOP=30; 最大GDOP阈值;
Innovation:新息,残差超过30米,丢掉此观测值;

(9) Number of Filter Iteration
EKF中,测量更新迭代次数,默认次数为1;

(10) Baseline Length Constraint
动基线模式下,输入基线长度和基线标准差/单位米

Options中,设置的内容,可以通过Load选项导入配置,后缀名为:.conf ,第二页内容如下:
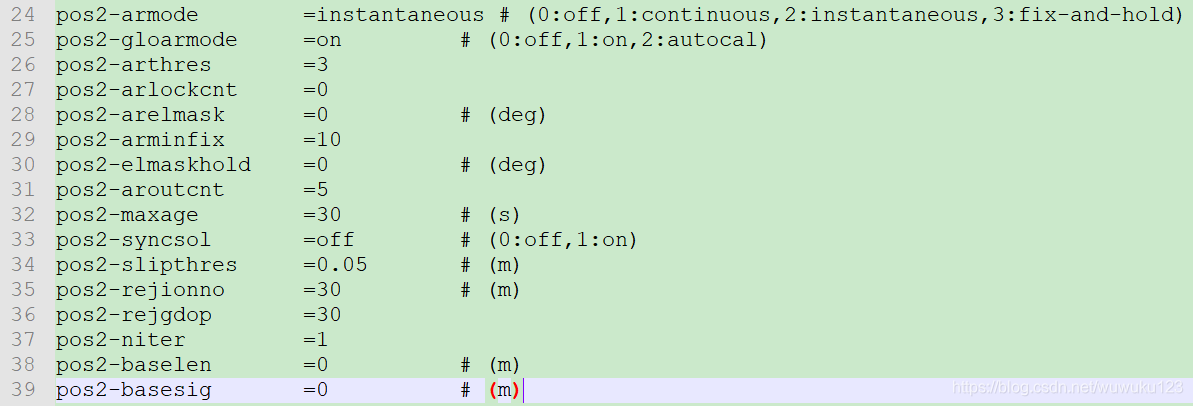
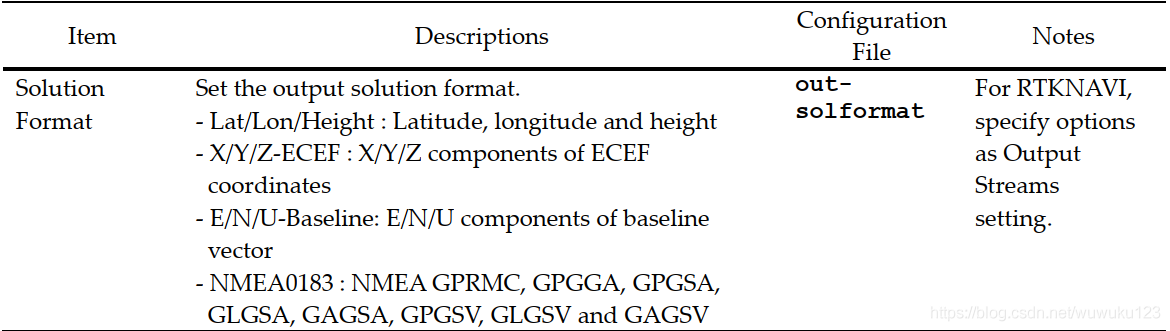
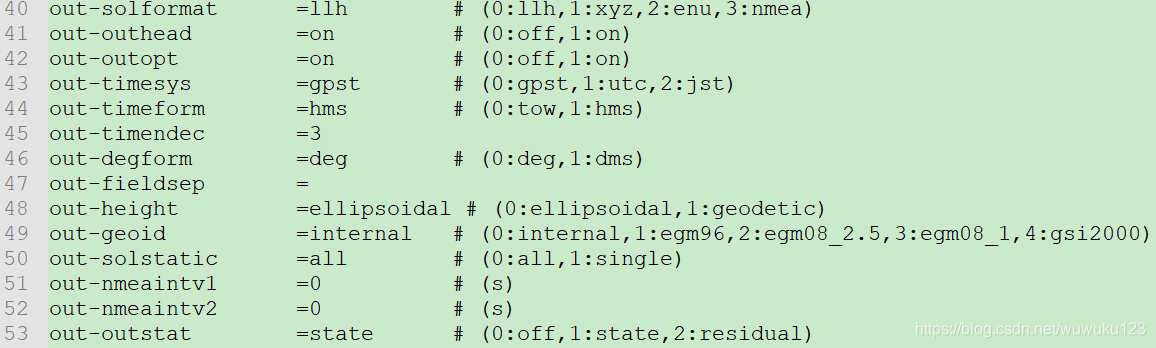
3、Output:

(1) Solution Format:
LLH、ECEF下[xyz]、基线向量[enu]、NMEA0183
(2) Output Header、Processing Options

(3) Time Format、#Of Decimals

(4) Latitude /Longitude Format

(5)Field Separator
默认为空

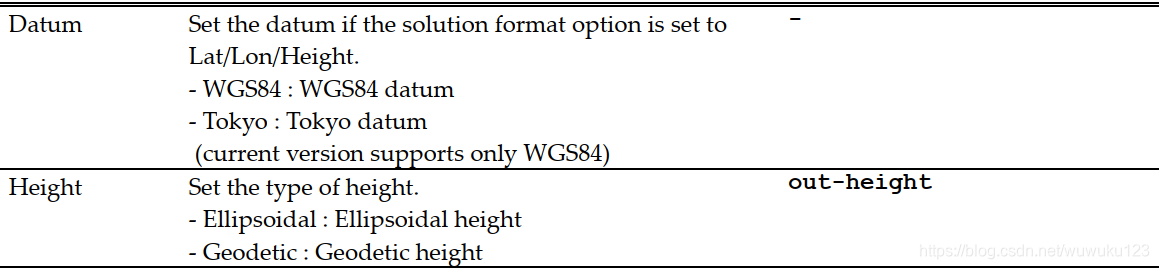
(6)Datum / Height
Datum:参考基准,一般为WGS-84框架
Height:高度:
ellipsoidal:椭球高
geodetic:大地高
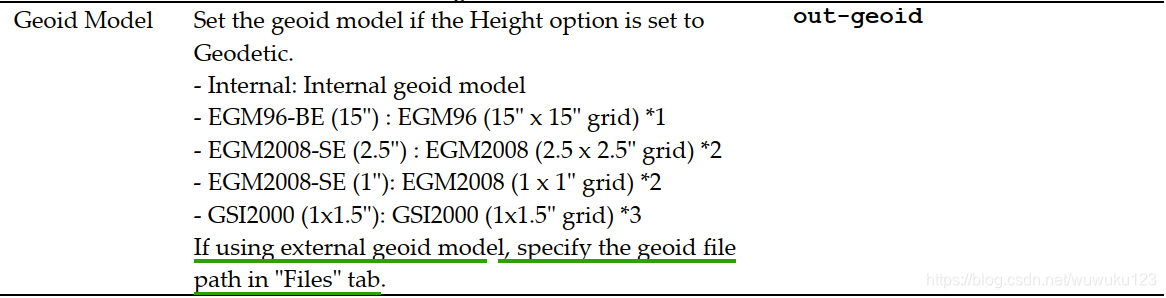
(7) Geoid Model 大地水准面模型
(8)Solution for Static mode
输出处理阶段的所有结果:仅适用于RTKPOST;
out-solstatic =all # (0:all,1:single)

(9)NMEA Interval(s) rmc/gga ,gsa/gsv
仅适用于RTKNAVI

(10)Output Solution Status /Debug Trace
配置如下:
1、
![]()
输出为:$POS,$VELACC,$CLK,$SAT,
2、
![]()
输出为:$POS,$VELACC,$CLK,
Options中,设置的内容,可以通过Load选项导入配置,后缀名为:.conf ,第三页内容如下:
4、Statistics:
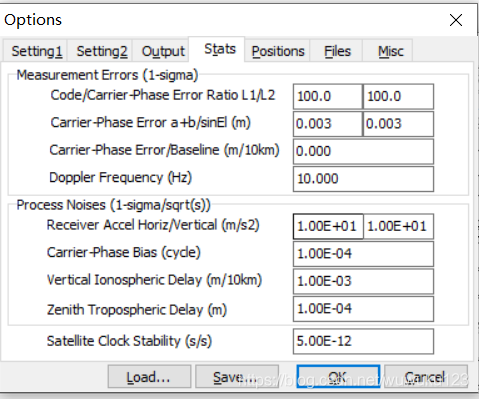
Options中,设置的内容,可以通过Load选项导入配置,后缀名为:.conf ,第四页内容如下:
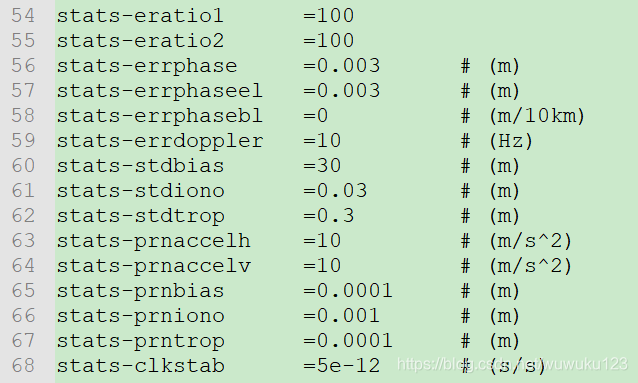
(1)Measurement Errors (1-Sigma)
设置伪距与载波相位误差的比例系数,默认值为100;
设置基准站载波相位的标准差,默认值为0.003米;
设置载波相位与高度角有关的标准差,默认值为0.003米;
设置载波相位与基线长度(每10km)有关的标准差,默认值为0;
设置多普勒标准差,默认值为10HZ;

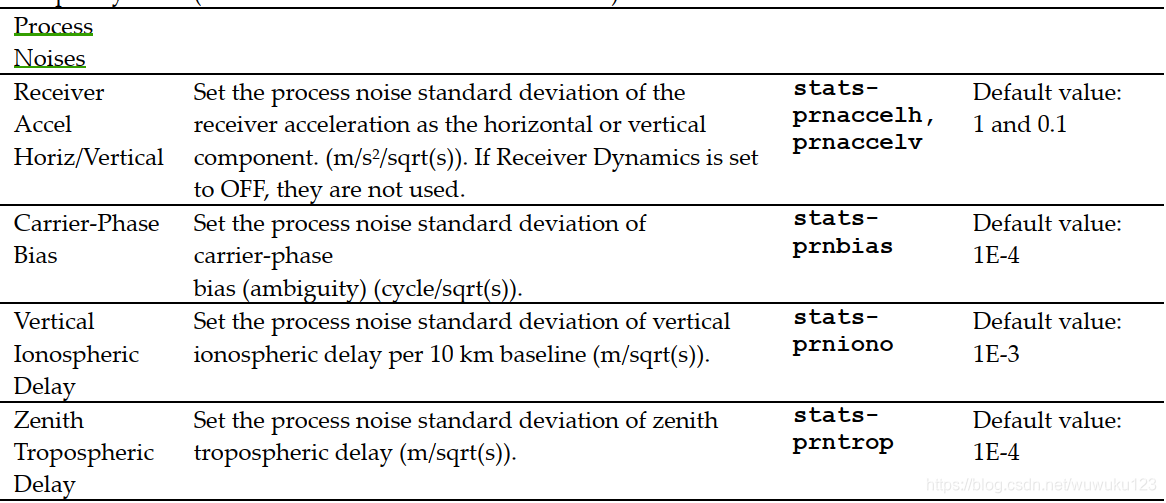
(2)Process Noises (1-Sigma/sqrt(s)) 角度随机游走

5、Positions:
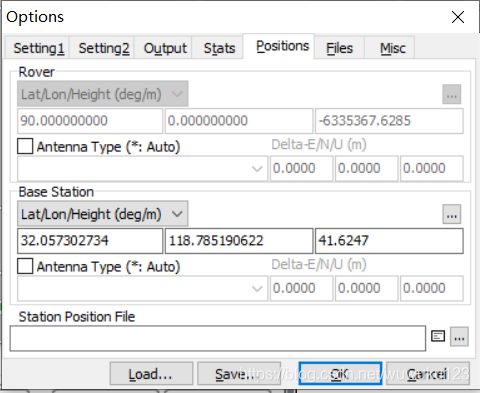
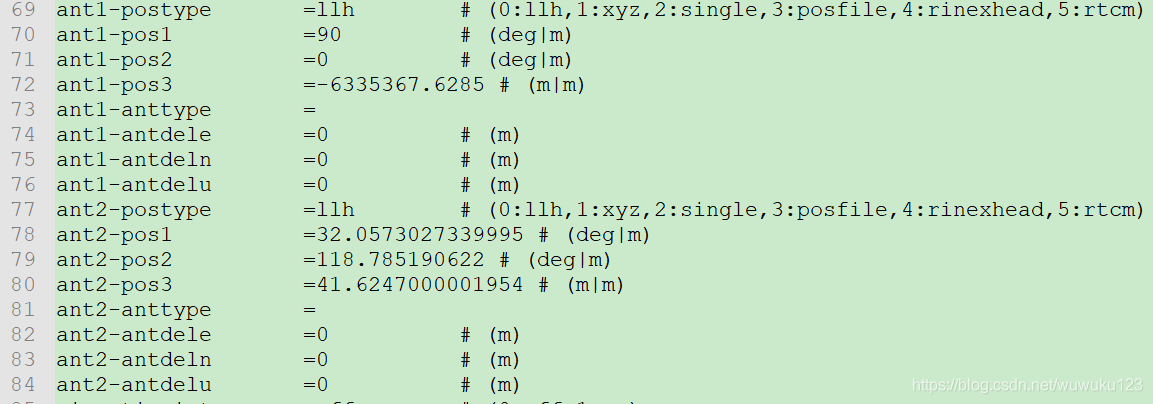
Options中,设置的内容,可以通过Load选项导入配置,后缀名为:.conf ,第五页内容如下:
(1)Rover 移动站

(2)Base 基准站
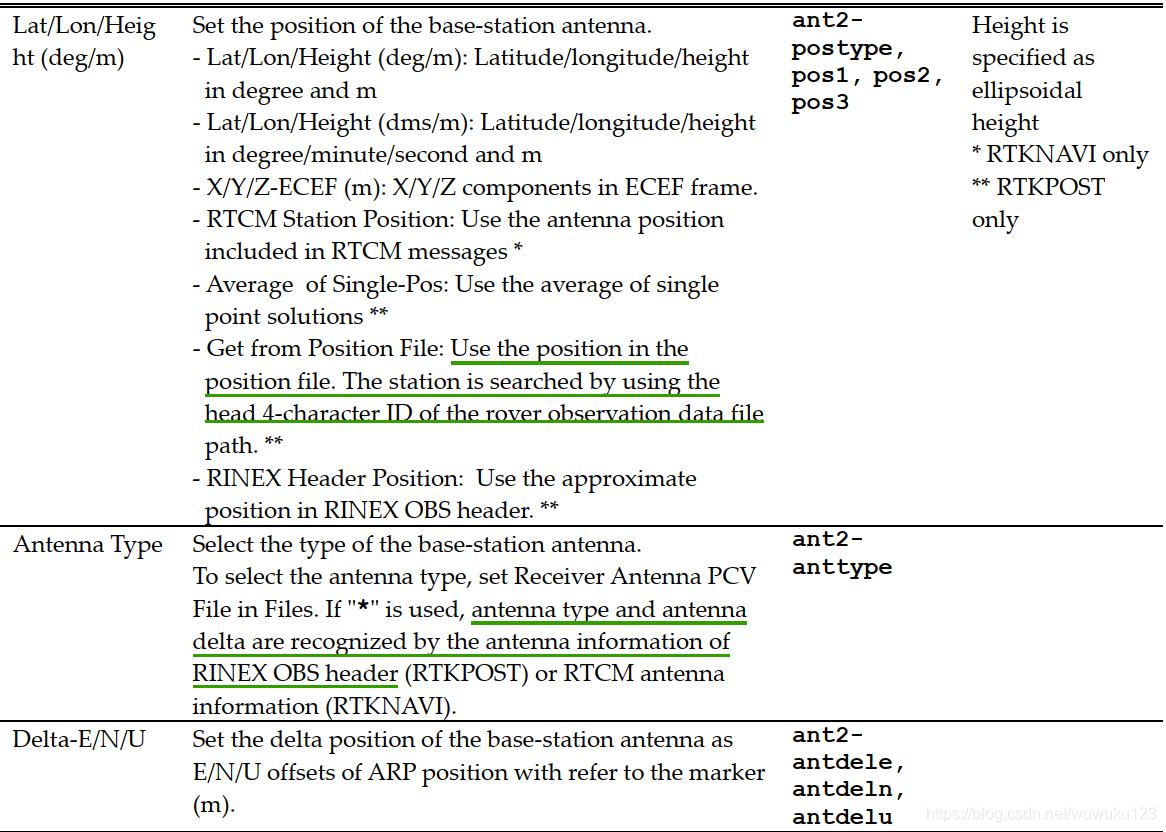
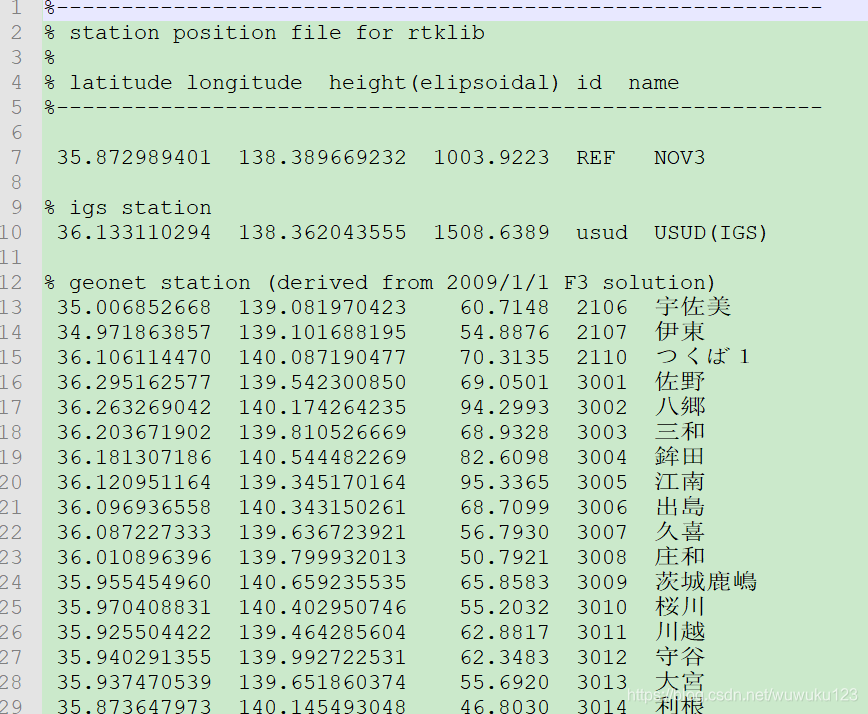
从文件导入基准站坐标:
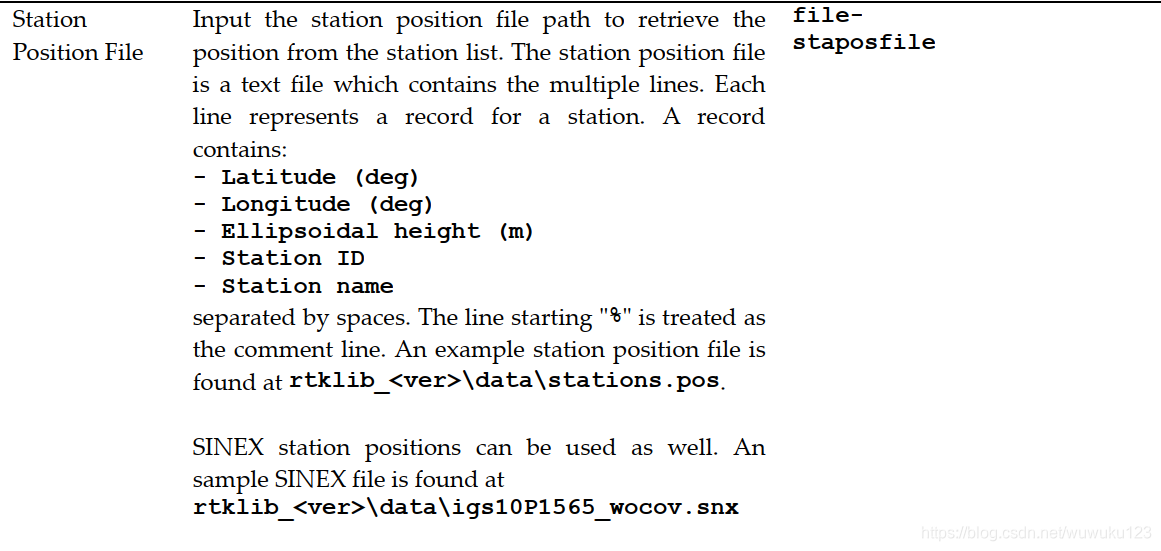
示例如下:一行记录分别为:纬度 经度 椭球高 基站ID 基站NAME
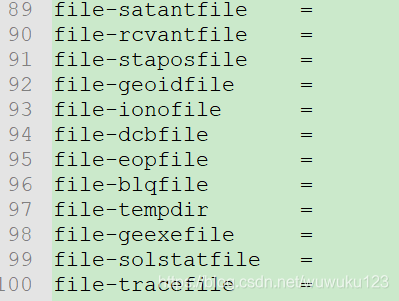
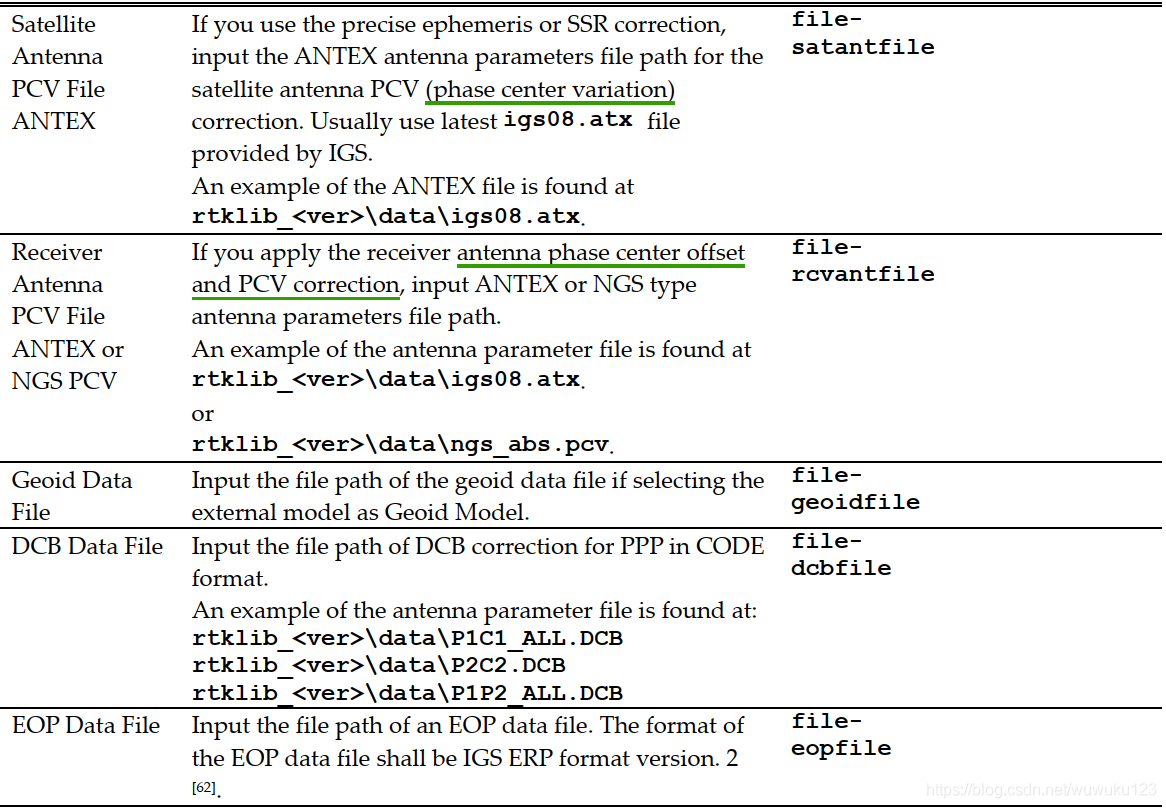
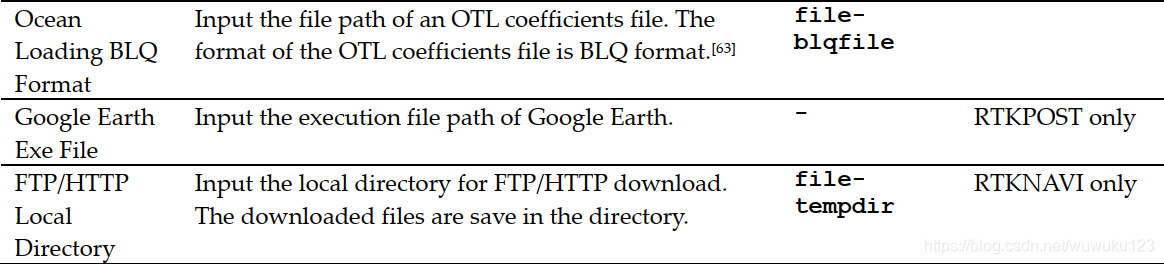
6、Files:
仅适用于RTKNAVI和RTKPOST
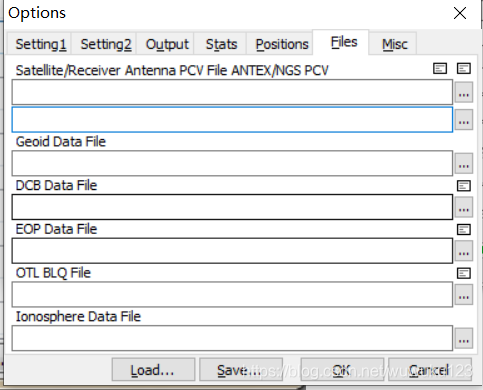
Options中,设置的内容,可以通过Load选项导入配置,后缀名为:.conf ,第六页内容如下:
7、Misc:
1、RTKPOST中:
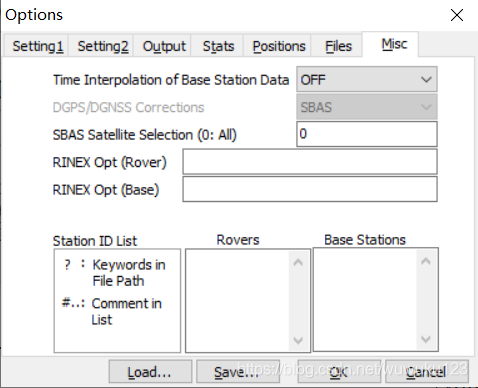
Options中,设置的内容,可以通过Load选项导入配置,后缀名为:.conf ,第七页内容如下:

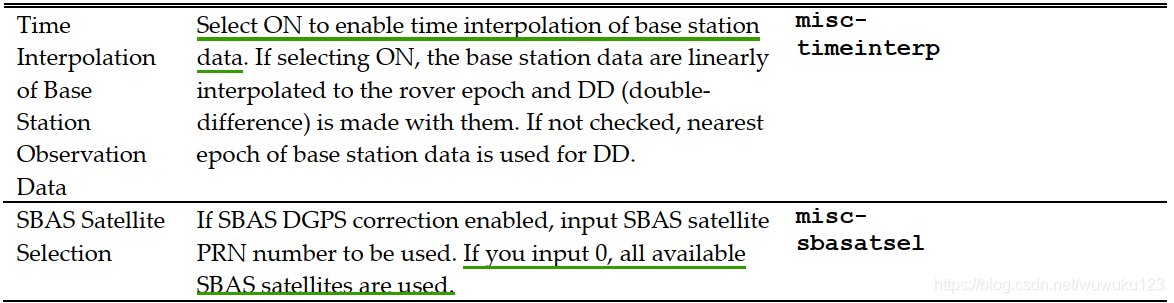
2、RTKNAVI中,配置:

参考:
RTKLIB MANUAL














 161
161











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









