







📝 面试求职: 「面试试题小程序」 ,内容涵盖 测试基础、Linux操作系统、MySQL数据库、Web功能测试、接口测试、APPium移动端测试、Python知识、Selenium自动化测试相关、性能测试、性能测试、计算机网络知识、Jmeter、HR面试,命中率杠杠的。(大家刷起来…)
📝 职场经验干货:
哈喽~小伙伴们,又到了我们每周的求职分享专场了!如果你是一位技术控,那么你一定会喜欢这家公司的招聘理念--要求新招聘的每一个人,是具有“创始人精神”的“1号员工”,是那些敢于开垦的人。而不是一个保守的,不会犯错的“正确的人”。(大白话:只要你有想法,你就可以大施拳脚)。
它是一家极具极客基因的创新科技公司-追觅!今天就从“公司介绍+职位解读+求职准备指南”三方面让大家更好的了解招聘信息,做到未雨绸缪!
阅读本文你将收获:
-
追觅科技公司简介;
-
招聘职位解析;
-
求职准备指南。
公司简介
追觅科技成立于2017年,创始人俞浩,清华大学背景,曾任学生创业项目负责人,因为从小对飞机的热爱,在校期间,刻苦研发,成为了中国最早的四旋翼无人机开发者。
他把“创始人模式”融入企业:希望每一个追觅人,都是创始人,具有从零到一的开创能力。开创新区域,开创新赛道,开创新高度。而不是一个保守的,不会犯错的“正确的人”。这种模式和对人的要求,可以说是真正尊重并释放优秀人才的潜力。
在这个传统家电企业重营销、轻研发的时代,追觅产品研发与设计人员占比达到60%,研发投入占收入的7%以上,领先行业平均水平。
公司在智能清洁领域不断探索创新,现有扫地机器人、无线吸尘器、洗地机、高速吹风机四大品类,并在高速数字马达、流体力学、机器人控制及SLAM(即时定位与地图构建)等方面拥有一系列授权专利并处于全球领先地位。
今年2月,追觅更是凭借技术颠覆,在激光雷达还没成为行业共识的时候(核心就一个字——贵),追觅在割草机器人上大胆采用激光雷达技术,截止今年2月底出货量达10万台,包括2万台销售订单,8万台代理商拿货。3月底4月初的日销售订单都超过500台。成为一条搅动割草机器人行业的鲶鱼 。
和带大疆基因的虎鲸(Hookii)相比,追觅已成为具备量产经验的大公司。
招聘职位解析
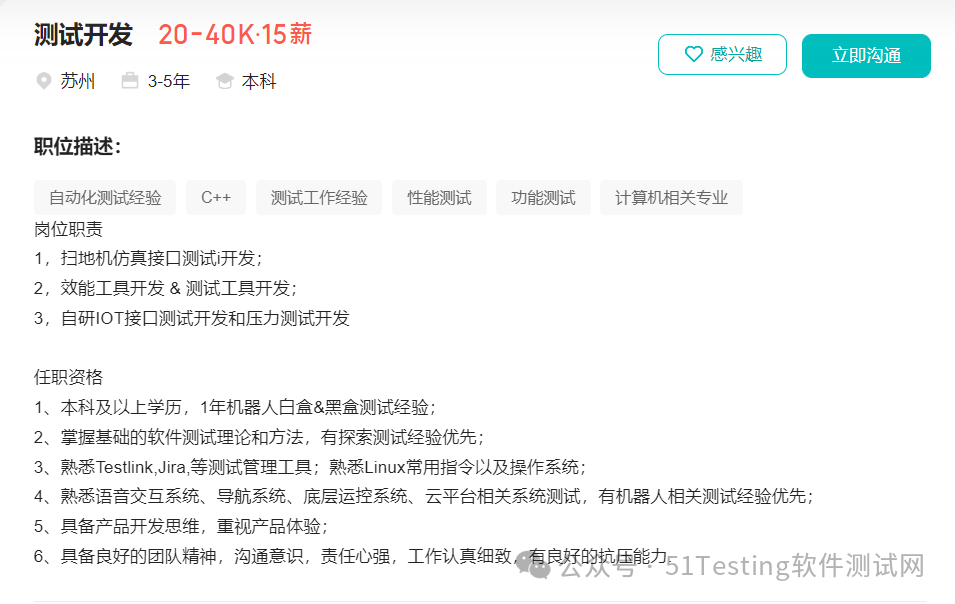
一、岗位核心职责解析
1、扫地机仿真接口测试开发
技术要点:需掌握机器人嵌入式系统接口测试技术,熟悉ROS(机器人操作系统)仿真环境搭建,具备Gazebo/V-REP等机器人仿真平台使用经验。
求职准备:
-
学习Robot Framework/Pytest+Allure自动化测试框架;
-
研究扫地机器人常见通信协议(如Modbus、CAN总线);
-
准备仿真测试案例(如SLAM建图异常模拟、多传感器数据融合测试)。
2、效能工具开发 & 测试工具开发
进阶要求:
-
需具备CI/CD流水线设计能力(Jenkins Pipeline优化);
-
掌握测试左移技术(如单元测试覆盖率提升工具);
-
熟悉测试数据分析可视化(ELK/ Grafana看板开发)。
亮点打造:
-
开发过测试脚手架工具(如自动生成测试用例工具)。
-
有AI赋能的测试工具开发经验(如基于机器学习的测试用例优先级排序)。
3、自研IOT接口测试与压力测试
关键技术栈:
-
物联网协议深度测试(MQTT QoS等级验证、CoAP重传机制测试);
-
边缘计算场景测试(端云协同时延测试);
-
百万级设备并发压测方案设计。
实战建议:
-
掌握Chaos Engineering在IOT领域的应用;
-
研究TSN(时间敏感网络)测试方法;
-
准备高可用性测试案例(故障转移、数据一致性验证)。
二、任职资格深度拆解
1、机器人测试经验强化项
白盒测试重点:
-
嵌入式代码静态分析(MISRA-C规则实施);
-
实时系统性能剖析(使用SystemTap/DTrace);
-
内存泄漏检测(Valgrind实战案例)。
黑盒测试进阶:
-
基于模型的测试(MBT)在导航系统中的应用;
-
传感器融合异常注入测试(IMU/激光雷达数据扰动)。
2、测试管理工具高阶用法
Testlink深度应用:
-
需求追踪矩阵(RTM)自动化生成;
-
与自动化测试框架的深度集成。
Jira增效技巧:
-
自定义工作流设计(结合测试阶段的状态机);
-
与Confluence的测试文档联动。
3、专项系统测试要点
语音交互测试:
-
方言识别率测试方案;
-
噪声场景下的唤醒率测试(构建声学混响室测试环境)。
导航系统测试:
-
SLAM建图精度评估(使用激光跟踪仪标定);
-
动态避障测试(引入移动障碍物平台)。
云平台测试重点:
-
分布式事务一致性测试(PACT契约测试);
-
微服务熔断测试(ChaosMonkey实践)。
3.求职准备指南
上述我们深度分析了机器人测试岗位的职责及要求,接下来我们就带领大家从"测试技术栈+机器人领域知识+工具开发能力"三个维度构建自己的竞争力模型,让自己有机会跟优秀的人一起共事!
一、测试技术栈深度构建
核心能力矩阵

成果展示建议
-
开发自动化测试框架插件(如支持ROS消息的断言库);
-
撰写性能测试分析报告(含火焰图定位瓶颈);
-
在GitHub维护测试工具仓库(如定制化Allure报告生成器)。
二、机器人领域知识体系搭建
知识图谱构建
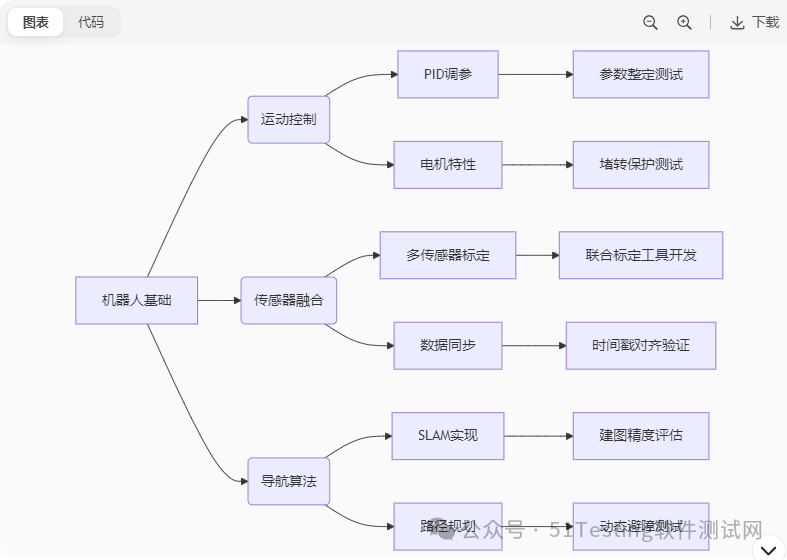
专项能力培养
1、硬件在环(HIL)测试:
-
使用CANoe模拟ECU通信;
-
开发ROS-MATLAB联合仿真接口;
-
设计电机异常工况测试用例。
2、算法验证方法论:
-
构建典型场景数据集(如复杂地形点云);
-
开发算法评估指标计算工具;
-
实施A/B测试对比不同SLAM算法。
3、行业标准研究:
-
解读ISO 13482服务机器人安全标准;
-
研究IEC 61508功能安全要求;
-
实践机器人EMC测试方案。
实战项目推荐
-
开发基于OpenCV的视觉里程计验证工具;
-
设计多机器人协作测试场景;
-
构建电池管理系统(BMS)测试平台。
三、工具开发能力锻造
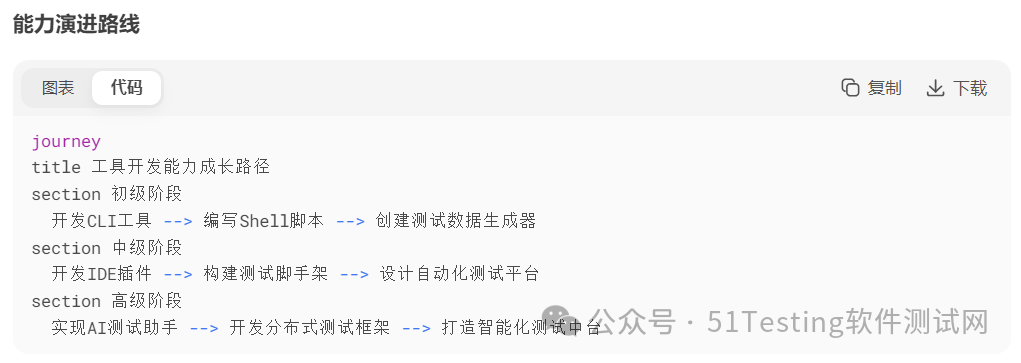
关键开发场景
1、效能工具开发:
-
测试用例自动生成工具(基于自然语言处理);
-
缺陷模式分析工具(关联历史缺陷库);
-
环境一键部署工具(Ansible+Docker集成)。
2、仿真测试工具:
-
ROS bag数据回放工具;
-
传感器噪声注入插件;
-
虚拟边界设置工具。
3、智能分析工具:
-
测试报告自动解读系统;
-
根因分析(RCA)辅助工具;
-
测试策略推荐引擎。
代码质量要求
-
实现参数化配置(YAML/JSON支持);
-
加入单元测试覆盖率(≥80%);
-
提供完善的日志系统(分级+旋转日志);
-
支持CI/CD自动构建(GitHub Actions流水线)。
看完上述的分享,大家都知道从哪些方面努力了吗?针对这期职位分析,你有什么更好的建议吗?或是期待我们下期分享哪个职位/行业/公司的招聘,欢迎评论区留言!
最后: 下方这份完整的软件测试视频教程已经整理上传完成,需要的朋友们可以自行领取【保证100%免费】



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









